以太网
概述
ESP-IDF 提供一系列灵活度高且兼具一致性的 API,为外部 SPI-Ethernet 模块提供支持。
本编程指南分为以下几个部分:
以太网基本概念
以太网是一种异步的带冲突检测的载波侦听多路访问 (CSMA/CD) 协议/接口。通常来说,以太网不太适用于低功耗应用。然而,得益于其广泛的部署、高效的网络连接、高数据率以及范围不限的可扩展性,几乎所有的有线通信都可以通过以太网进行。
符合 IEEE 802.3 标准的正常以太网帧的长度在 64 至 1518 字节之间,由五个或六个不同的字段组成:目的地 MAC 地址 (DA)、源 MAC 地址 (SA)、类型/长度字段、数据有效载荷字段、可选的填充字段和帧校验序列字段 (CRC)。此外,在以太网上传输时,以太网数据包的开头需附加 7 字节的前导码和 1 字节的帧起始符 (SOF)。
因此,双绞线上的通信如图所示:
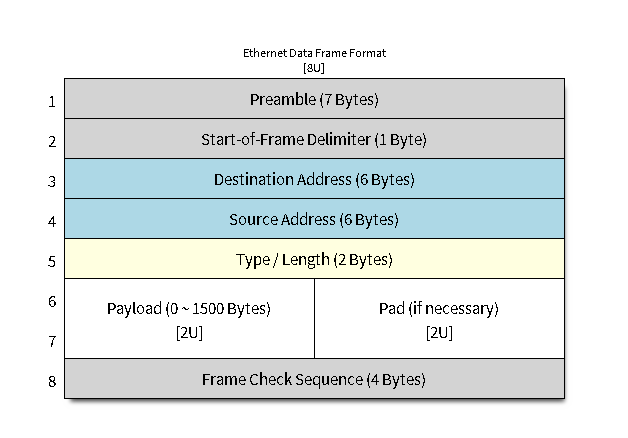
以太网数据帧格式
前导码和帧起始符
前导码包含 7 字节的 55H,作用是使接收器在实际帧到达之前锁定数据流。
帧前界定符 (SFD) 为二进制序列 10101011 (物理介质层可见)。有时它也被视作前导码的一部分。
在传输和接收数据时,协议将自动从数据包中生成/移除前导码和帧起始符。
目的地址 (DA)
目的地址字段包含一个 6 字节长的设备 MAC 地址,数据包将发送到该地址。如果 MAC 地址第一个字节中的最低有效位是 1,则该地址为组播地址。例如,01-00-00-F0-00 和 33-45-67-89-AB-CD 是组播地址,而 00-00-00-F0-00 和 32-45-67-89-AB-CD 不是。
带有组播地址的数据包将到达选定的一组以太网节点,并发挥重要作用。如果目的地址字段是保留的多播地址,即 FF-FF-FF-FF-FF-FF,则该数据包是一个广播数据包,指向共享网络中的每个对象。如果 MAC 地址的第一个字节中的最低有效位为 0,则该地址为单播地址,仅供寻址节点使用。
通常,EMAC 控制器会集成接收过滤器,用于丢弃或接收带有组播、广播和/或单播目的地址的数据包。传输数据包时,由主机控制器将所需的目标地址写入传输缓冲区。
源地址 (SA)
源地址字段包含一个 6 字节长的节点 MAC 地址,以太网数据包通过该节点创建。以太网的用户需为所使用的任意控制器生成唯一的 MAC 地址。MAC 地址由两部分组成:前三个字节称为组织唯一标识符 (OUI),由 IEEE 分配;后三个字节是地址字节,由购买 OUI 的公司配置。有关 ESP-IDF 中使用的 MAC 地址的详细信息,请参见 MAC 地址分配。
传输数据包时,由主机控制器将分配的源 MAC 地址写入传输缓冲区。
类型/长度
类型/长度字段长度为 2 字节。如果其值 <= 1500(十进制),则该字段为长度字段,指定在数据字段后的非填充数据量;如果其值 >= 1536,则该字段值表示后续数据包所属的协议。以下为该字段的常见值:
IPv4 = 0800H
IPv6 = 86DDH
ARP = 0806H
使用专有网络的用户可以将此字段配置为长度字段。然而,对于使用互联网协议 (IP) 或地址解析协议 (ARP) 等协议的应用程序,在传输数据包时,应将此字段配置为协议规范定义的适当类型。
数据有效载荷
数据有效载荷字段是一个可变长度的字段,长度从 0 到 1500 字节不等。更大的数据包会因违反以太网标准而被大多数以太网节点丢弃。
数据有效载荷字段包含客户端数据,如 IP 数据报。
填充及帧校验序列 (FCS)
填充字段是一个可变长度的字段。数据有效载荷较小时,将添加填充字段以满足 IEEE 802.3 规范的要求。
以太网数据包的 DA、SA、类型、数据有效载荷和填充字段共计必须不小于 60 字节。加上所需的 4 字节 FCS 字段,数据包的长度必须不小于 64 字节。如果数据有效载荷字段小于 46 字节,则需要加上一个填充字段。
帧校验序列字段 (FCS) 长度为 4 字节,其中包含一个行业标准的 32 位 CRC,该 CRC 是根据 DA、SA、类型、数据有效载荷和填充字段的数据计算的。鉴于计算 CRC 的复杂性,硬件通常会自动生成一个有效的 CRC 进行传输。否则,需由主机控制器生成 CRC 并将其写入传输缓冲区。
通常情况下,主机控制器无需关注填充字段和 CRC 字段,因为这两部分可以在传输或接收时由硬件 EMAC 自动生成或验证。然而,当数据包到达时,填充字段和 CRC 字段将被写入接收缓冲区。因此,如果需要的话,主机控制器也可以对它们进行评估。
备注
除了上述的基本数据帧,在 10/100 Mbps 以太网中还有两种常见的帧类型:控制帧和 VLAN 标记帧。ESP-IDF 不支持这两种帧类型。
配置 MAC 和 PHY
以太网驱动器由两部分组成:MAC 和 PHY。
根据以太网板设计,需要分别为 MAC 和 PHY 配置必要的参数,通过两者完成驱动程序的安装。
MAC 的相关配置可以在 eth_mac_config_t 中找到,具体包括:
eth_mac_config_t::sw_reset_timeout_ms:软件复位超时值,单位为毫秒。通常,MAC 复位应在 100 ms 内完成。eth_mac_config_t::rx_task_stack_size和eth_mac_config_t::rx_task_prio:MAC 驱动会创建一个专门的任务来处理传入的数据包,这两个参数用于设置该任务的堆栈大小和优先级。eth_mac_config_t::flags:指定 MAC 驱动应支持的额外功能,尤其适用于某些特殊情况。这个字段的值支持与以ETH_MAC_FLAG_为前缀的宏进行 OR 运算。例如,如果要求 MAC 驱动程序在 cache 禁用时仍能正常工作,那么则需要用ETH_MAC_FLAG_WORK_WITH_CACHE_DISABLE配置这个字段。
PHY 的相关配置可以在 eth_phy_config_t 中找到,具体包括:
eth_phy_config_t::phy_addr:同一条 SMI 总线上可以存在多个 PHY 设备,所以有必要为各个 PHY 设备分配唯一地址。通常,这个地址是在硬件设计期间,通过拉高/拉低一些 PHY strapping 管脚来配置的。根据不同的以太网开发板,可配置值为0到15。需注意,如果 SMI 总线上仅有一个 PHY 设备,将该值配置为-1,即可使驱动程序自动检测 PHY 地址。eth_phy_config_t::reset_timeout_ms:复位超时值,单位为毫秒。通常,PHY 复位应在 100 ms 内完成。eth_phy_config_t::autonego_timeout_ms:自动协商超时值,单位为毫秒。以太网驱动程序会与链路另一端的设备进行自协商,以确定连接的最佳双工模式和速率。此值通常取决于电路板上 PHY 设备的性能。eth_phy_config_t::reset_gpio_num:如果开发板同时将 PHY 复位管脚连接至了任意 GPIO 管脚,请使用该字段进行配置。否则,配置为-1。eth_phy_config_t::hw_reset_assert_time_us:PHY 复位引脚被置为有效状态的时间(以微秒为单位)。将该值配置为0,即可使用芯片默认的复位时长。eth_phy_config_t::post_hw_reset_delay_ms:PHY 硬件复位完成后的等待时间(以毫秒为单位)。将该值配置为0,即可使用芯片默认的等待时长,配置为-1,表示执行 PHY 硬件复位后不等待。
ESP-IDF 在宏 ETH_MAC_DEFAULT_CONFIG 和 ETH_PHY_DEFAULT_CONFIG 中为 MAC 和 PHY 提供了默认配置。
创建 MAC 和 PHY 实例
以太网驱动是以面向对象的方式实现的。对 MAC 和 PHY 的任何操作都应基于实例。
SPI-Ethernet 模块
eth_mac_config_t mac_config = ETH_MAC_DEFAULT_CONFIG(); // 应用默认的通用 MAC 配置
eth_phy_config_t phy_config = ETH_PHY_DEFAULT_CONFIG(); // 应用默认的 PHY 配置
phy_config.phy_addr = CONFIG_ETHERNET_PHY_ADDR; // 根据开发板设计更改 PHY 地址
phy_config.reset_gpio_num = CONFIG_ETHERNET_PHY_RST_GPIO; // 更改用于 PHY 复位的 GPIO
// 安装 GPIO 中断服务(因为 SPI-Ethernet 模块为中断驱动)
gpio_install_isr_service(0);
// 配置 SPI 总线
spi_device_handle_t spi_handle = NULL;
spi_bus_config_t buscfg = {
.miso_io_num = CONFIG_ETHERNET_SPI_MISO_GPIO,
.mosi_io_num = CONFIG_ETHERNET_SPI_MOSI_GPIO,
.sclk_io_num = CONFIG_ETHERNET_SPI_SCLK_GPIO,
.quadwp_io_num = -1,
.quadhd_io_num = -1,
};
ESP_ERROR_CHECK(spi_bus_initialize(CONFIG_ETHERNET_SPI_HOST, &buscfg, 1));
// 配置 SPI 从机设备
spi_device_interface_config_t spi_devcfg = {
.mode = 0,
.clock_speed_hz = CONFIG_ETHERNET_SPI_CLOCK_MHZ * 1000 * 1000,
.spics_io_num = CONFIG_ETHERNET_SPI_CS_GPIO,
.queue_size = 20
};
/* dm9051 ethernet driver is based on spi driver */
eth_dm9051_config_t dm9051_config = ETH_DM9051_DEFAULT_CONFIG(CONFIG_ETHERNET_SPI_HOST, &spi_devcfg);
dm9051_config.int_gpio_num = CONFIG_ETHERNET_SPI_INT_GPIO;
esp_eth_mac_t *mac = esp_eth_mac_new_dm9051(&dm9051_config, &mac_config);
esp_eth_phy_t *phy = esp_eth_phy_new_dm9051(&phy_config);
备注
当为 SPI-Ethernet 模块(例如 DM9051)创建 MAC 和 PHY 实例时,由于 PHY 是集成在模块中的,因此调用的实例创建函数的后缀须保持一致(例如 esp_eth_mac_new_dm9051 和 esp_eth_phy_new_dm9051 搭配使用)。
针对不同的以太网模块,或是为了满足特定 PCB 上的 SPI 时序,SPI 从机设备配置(即 spi_device_interface_config_t)可能略有不同。具体配置请查看模块规格以及 ESP-IDF 中的示例。
小技巧
乐鑫为多种 SPI-Ethernet 模块提供了驱动程序,这些驱动程序可在 esp-eth-drivers 仓库中获取。驱动以组件形式分发,并可在 ESP 组件库 上获取。
安装驱动程序
安装以太网驱动程序需要结合 MAC 和 PHY 实例,并在 esp_eth_config_t 中配置一些额外的高级选项(即不仅限于 MAC 或 PHY 的选项):
esp_eth_config_t::mac:由 MAC 生成器创建的实例(例如esp_eth_mac_new_esp32())。esp_eth_config_t::phy:由 PHY 生成器创建的实例(例如esp_eth_phy_new_generic())。esp_eth_config_t::check_link_period_ms:以太网驱动程序会启用操作系统定时器来定期检查链接状态。该字段用于设置间隔时间,单位为毫秒。esp_eth_config_t::stack_input或esp_eth_config_t::stack_input_info:在大多数的以太网物联网应用中,驱动器接收的以太网帧会被传递到上层(如 TCP/IP 栈)。经配置,该字段为负责处理传入帧的函数。可以在安装驱动程序后,通过函数esp_eth_update_input_path()更新该字段。该字段支持在运行过程中进行更新。esp_eth_config_t::on_lowlevel_init_done和esp_eth_config_t::on_lowlevel_deinit_done:这两个字段用于指定钩子函数,当去初始化或初始化低级别硬件时,会调用钩子函数。
ESP-IDF 在宏 ETH_DEFAULT_CONFIG 中为安装驱动程序提供了一个默认配置。
esp_eth_config_t config = ETH_DEFAULT_CONFIG(mac, phy); // 应用默认驱动程序配置
esp_eth_handle_t eth_handle = NULL; // 驱动程序安装完毕后,将得到驱动程序的句柄
esp_eth_driver_install(&config, ð_handle); // 安装驱动程序
以太网驱动程序包含事件驱动模型,该模型会向用户空间发送有用及重要的事件。安装以太网驱动程序之前,需要首先初始化事件循环。有关事件驱动编程的更多信息,请参考 事件循环库。
/** 以太网事件的事件处理程序 */
static void eth_event_handler(void *arg, esp_event_base_t event_base,
int32_t event_id, void *event_data)
{
uint8_t mac_addr[6] = {0};
/* 可从事件数据中获得以太网驱动句柄 */
esp_eth_handle_t eth_handle = *(esp_eth_handle_t *)event_data;
switch (event_id) {
case ETHERNET_EVENT_CONNECTED:
esp_eth_ioctl(eth_handle, ETH_CMD_G_MAC_ADDR, mac_addr);
ESP_LOGI(TAG, "Ethernet Link Up");
ESP_LOGI(TAG, "Ethernet HW Addr %02x:%02x:%02x:%02x:%02x:%02x",
mac_addr[0], mac_addr[1], mac_addr[2], mac_addr[3], mac_addr[4], mac_addr[5]);
break;
case ETHERNET_EVENT_DISCONNECTED:
ESP_LOGI(TAG, "Ethernet Link Down");
break;
case ETHERNET_EVENT_START:
ESP_LOGI(TAG, "Ethernet Started");
break;
case ETHERNET_EVENT_STOP:
ESP_LOGI(TAG, "Ethernet Stopped");
break;
default:
break;
}
}
esp_event_loop_create_default(); // 创建一个在后台运行的默认事件循环
esp_event_handler_register(ETH_EVENT, ESP_EVENT_ANY_ID, ð_event_handler, NULL); // 注册以太网事件处理程序(用于在发生 link up/down 等事件时,处理特定的用户相关内容)
启动以太网驱动程序
安装驱动程序后,可以立即启动以太网。
esp_eth_start(eth_handle); // 启动以太网驱动程序状态机
连接驱动程序至 TCP/IP 协议栈
现在,以太网驱动程序已经完成安装。但对应 OSI(开放式系统互连模型)来看,目前阶段仍然属于第二层(即数据链路层)。这意味着可以检测到 link up/down 事件,获得用户空间的 MAC 地址,但无法获得 IP 地址,当然也无法发送 HTTP 请求。ESP-IDF 中使用的 TCP/IP 协议栈是 LwIP,关于 LwIP 的更多信息,请参考 LwIP。
要将以太网驱动程序连接至 TCP/IP 协议栈,需要以下三步:
为以太网驱动程序创建网络接口
将网络接口连接到以太网驱动程序
注册 IP 事件处理程序
有关网络接口的更多信息,请参考 Network Interface。
/** IP_EVENT_ETH_GOT_IP 的事件处理程序 */
static void got_ip_event_handler(void *arg, esp_event_base_t event_base,
int32_t event_id, void *event_data)
{
ip_event_got_ip_t *event = (ip_event_got_ip_t *) event_data;
const esp_netif_ip_info_t *ip_info = &event->ip_info;
ESP_LOGI(TAG, "Ethernet Got IP Address");
ESP_LOGI(TAG, "~~~~~~~~~~~");
ESP_LOGI(TAG, "ETHIP:" IPSTR, IP2STR(&ip_info->ip));
ESP_LOGI(TAG, "ETHMASK:" IPSTR, IP2STR(&ip_info->netmask));
ESP_LOGI(TAG, "ETHGW:" IPSTR, IP2STR(&ip_info->gw));
ESP_LOGI(TAG, "~~~~~~~~~~~");
}
esp_netif_init()); // 初始化 TCP/IP 网络接口(在应用程序中应仅调用一次)
esp_netif_config_t cfg = ESP_NETIF_DEFAULT_ETH(); // 应用以太网的默认网络接口配置
esp_netif_t *eth_netif = esp_netif_new(&cfg); // 为以太网驱动程序创建网络接口
esp_netif_attach(eth_netif, esp_eth_new_netif_glue(eth_handle)); // 将以太网驱动程序连接至 TCP/IP 协议栈
esp_event_handler_register(IP_EVENT, IP_EVENT_ETH_GOT_IP, &got_ip_event_handler, NULL); // 注册用户定义的 IP 事件处理程序
esp_eth_start(eth_handle); // 启动以太网驱动程序状态机
警告
推荐在完成整个以太网驱动和网络接口的初始化后,再注册用户定义的以太网/IP 事件处理程序,也就是把注册事件处理程序作为启动以太网驱动程序的最后一步。这样可以确保以太网驱动程序或网络接口将首先执行以太网/IP 事件,从而保证在执行用户定义的处理程序时,系统处于预期状态。
以太网驱动程序的杂项控制
以下功能只支持在安装以太网驱动程序后调用。
关闭以太网驱动程序:
esp_eth_stop()更新以太网数据输入路径:
esp_eth_update_input_path()获取/设置以太网驱动程序杂项内容:
esp_eth_ioctl()
/* 获取 MAC 地址 */
uint8_t mac_addr[6];
memset(mac_addr, 0, sizeof(mac_addr));
esp_eth_ioctl(eth_handle, ETH_CMD_G_MAC_ADDR, mac_addr);
ESP_LOGI(TAG, "Ethernet MAC Address: %02x:%02x:%02x:%02x:%02x:%02x",
mac_addr[0], mac_addr[1], mac_addr[2], mac_addr[3], mac_addr[4], mac_addr[5]);
/* 获取 PHY 地址 */
int phy_addr = -1;
esp_eth_ioctl(eth_handle, ETH_CMD_G_PHY_ADDR, &phy_addr);
ESP_LOGI(TAG, "Ethernet PHY Address: %d", phy_addr);
数据流量控制
受 RAM 大小限制,在网络拥堵时,MCU 上的以太网通常仅能处理有限数量的帧。发送站的数据传输速度可能快于对等端的接收能力。以太网数据流量控制机制允许接收节点向发送方发出信号,要求暂停传输,直到接收方跟上。这项功能是通过暂停帧实现的,该帧定义在 IEEE 802.3x 中。
暂停帧是一种特殊的以太网帧,用于携带暂停命令,其 EtherType 字段为 0x8808,控制操作码为 0x0001。只有配置为全双工操作的节点组可以发送暂停帧。当节点组希望暂停链路的另一端时,它会发送一个暂停帧到 48 位的保留组播地址 01-80-C2-00-00-01。暂停帧中也包括请求暂停的时间段,以两字节的整数形式发送,值的范围从 0 到 65535。
安装以太网驱动程序后,数据流量控制功能默认禁用,可以通过以下方式启用此功能:
bool flow_ctrl_enable = true;
esp_eth_ioctl(eth_handle, ETH_CMD_S_FLOW_CTRL, &flow_ctrl_enable);
需注意,暂停帧是在自动协商期间由 PHY 向对等端公布的。只有当链路两端都支持暂停帧时,以太网驱动程序才会发送暂停帧。
应用示例
ethernet/basic 演示了如何使用以太网驱动程序,包括驱动程序的安装、将其连接到
esp_netif、发送 DHCP 请求以及获取可 ping 的 IP 地址。ethernet/iperf 演示了如何使用以太网功能,使用 iPerf 测量吞吐量/带宽。
ethernet/ptp 演示了如何在以太网上使用精确时间协议 (PTP) 同步时间。
network/vlan_support 演示了如何在以太网上创建虚拟网络接口,包括 VLAN 和非 VLAN 接口。
network/sta2eth 演示了如何使用 Wi-Fi station 和有线接口(如以太网或 USB)创建 1 对 1 的桥接。
network/simple_sniffer 演示了如何在嗅探模式下使用 Wi-Fi 和以太网来捕获数据包,并将其保存为 PCAP 格式。
network/eth2ap 演示了如何实现一个桥接器,在以太网端口和 Wi-Fi AP 接口之间转发数据包。该示例使用 ESP32-C6 创建以太网和 Wi-Fi 之间的 1 对多连接,而无需初始化 TCP/IP 栈。
network/bridge 演示了如何使用 LwIP IEEE 802.1D 桥接器根据 MAC 地址在多个网络段之间转发以太网帧。
大多数协议示例也适用于以太网:protocols
进阶操作
自定义 PHY 驱动程序
市面上有多家 PHY 芯片制造商提供各种类型的芯片。ESP-IDF 现已支持 通用 PHY 和数种特定的 PHY 芯片,但是由于价格、功能、库存等原因,有时用户还是无法找到一款能满足其实际需求的芯片。
好在 IEEE 802.3 在其 22.2.4 管理功能部分对 EMAC 和 PHY 之间的管理接口进行了标准化。该部分定义了所谓的 ”MII 管理接口”规范,用于控制 PHY 和收集 PHY 的状态,还定义了一组管理寄存器来控制芯片行为、链接属性、自动协商配置等。在 ESP-IDF 中,这项基本的管理功能是由 esp_eth/src/phy/esp_eth_phy_802_3.c 实现的,这也大大降低了创建新的自定义 PHY 芯片驱动的难度。
备注
由于一些 PHY 芯片可能不符合 IEEE 802.3 第 22.2.4 节的规定,所以请首先查看 PHY 数据手册。不过,就算芯片不符合规定,依旧可以创建自定义 PHY 驱动程序,只是由于需要自行定义所有的 PHY 管理功能,这个过程将变得较为复杂。
ESP-IDF 以太网驱动程序所需的大部分 PHY 管理功能都已涵盖在 esp_eth/src/phy/esp_eth_phy_802_3.c 中。不过对于以下几项,可能仍需针对不同芯片开发具体的管理功能:
链接状态。此项总是由使用的具体芯片决定
芯片初始化。即使不存在严格的限制,也应进行自定义,以确保使用的是符合预期的芯片
芯片的具体功能配置
创建自定义 PHY 驱动程序的步骤:
请根据 PHY 数据手册,定义厂家私有的寄存器。
准备衍生的 PHY 管理对象信息结构,该结构:
必须至少包含 IEEE 802.3
phy_802_3_t父对象可选择包含额外的变量,以支持非 IEEE 802.3 或定制功能。
定义针对芯片的特定管理回调功能。
初始化 IEEE 802.3 父对象并重新分配针对芯片的特定管理回调功能。
实现新的自定义 PHY 驱动程序后,你可以通过 乐鑫组件注册表 将驱动分享给其他用户。
API 参考
Header File
This header file can be included with:
#include "hal/eth_types.h"
This header file is a part of the API provided by the
esp_hal_emaccomponent. To declare that your component depends onesp_hal_emac, add the following to your CMakeLists.txt:REQUIRES esp_hal_emac
or
PRIV_REQUIRES esp_hal_emac
Enumerations
-
enum eth_data_interface_t
Ethernet interface.
Values:
-
enumerator EMAC_DATA_INTERFACE_RMII
Reduced Media Independent Interface
-
enumerator EMAC_DATA_INTERFACE_MII
Media Independent Interface
-
enumerator EMAC_DATA_INTERFACE_RGMII
Reduced Gigabit Media Independent Interface
-
enumerator EMAC_DATA_INTERFACE_RMII
-
enum eth_link_t
Ethernet link status.
Values:
-
enumerator ETH_LINK_UP
Ethernet link is up
-
enumerator ETH_LINK_DOWN
Ethernet link is down
-
enumerator ETH_LINK_UP
-
enum eth_speed_t
Ethernet speed.
Values:
-
enumerator ETH_SPEED_10M
Ethernet speed is 10Mbps
-
enumerator ETH_SPEED_100M
Ethernet speed is 100Mbps
-
enumerator ETH_SPEED_1000M
Ethernet speed is 1000Mbps
-
enumerator ETH_SPEED_MAX
Max speed mode (for checking purpose)
-
enumerator ETH_SPEED_10M
-
enum eth_duplex_t
Ethernet duplex mode.
Values:
-
enumerator ETH_DUPLEX_HALF
Ethernet is in half duplex
-
enumerator ETH_DUPLEX_FULL
Ethernet is in full duplex
-
enumerator ETH_DUPLEX_HALF
-
enum eth_checksum_t
Ethernet Checksum.
Values:
-
enumerator ETH_CHECKSUM_SW
Ethernet checksum calculate by software
-
enumerator ETH_CHECKSUM_HW
Ethernet checksum calculate by hardware
-
enumerator ETH_CHECKSUM_SW
-
enum eth_mac_dma_burst_len_t
Internal ethernet EMAC's DMA available burst sizes.
Values:
-
enumerator ETH_DMA_BURST_LEN_32
-
enumerator ETH_DMA_BURST_LEN_16
-
enumerator ETH_DMA_BURST_LEN_8
-
enumerator ETH_DMA_BURST_LEN_4
-
enumerator ETH_DMA_BURST_LEN_2
-
enumerator ETH_DMA_BURST_LEN_1
-
enumerator ETH_DMA_BURST_LEN_32
-
enum eth_mac_ptp_update_method_t
EMAC System timestamp update update method.
Values:
-
enumerator ETH_PTP_UPDATE_METHOD_COARSE
EMAC System timestamp update using the Coarse method
-
enumerator ETH_PTP_UPDATE_METHOD_FINE
EMAC System timestamp update using the Fine method
-
enumerator ETH_PTP_UPDATE_METHOD_COARSE
-
enum eth_mac_ptp_roll_type_t
EMAC System Timestamp Rollover.
Values:
-
enumerator ETH_PTP_DIGITAL_ROLLOVER
Digital - subseconds register rolls over after 999999999 value (1 nanosecond accuracy)
-
enumerator ETH_PTP_BINARY_ROLLOVER
Binary - subseconds register rolls over after 0x7FFFFFFF value
-
enumerator ETH_PTP_DIGITAL_ROLLOVER
-
enum eth_pad_t
EMAC System dedicated pad identifier.
Values:
-
enumerator ETH_PAD_RMII_CLK
-
enumerator ETH_PAD_RX_CLK
-
enumerator ETH_PAD_PHY_RXDV
-
enumerator ETH_PAD_PHY_RXD3
-
enumerator ETH_PAD_PHY_RXD2
-
enumerator ETH_PAD_PHY_RXD1
-
enumerator ETH_PAD_PHY_RXD0
-
enumerator ETH_PAD_TX_CLK
-
enumerator ETH_PAD_PHY_TXEN
-
enumerator ETH_PAD_PHY_TXD3
-
enumerator ETH_PAD_PHY_TXD2
-
enumerator ETH_PAD_PHY_TXD1
-
enumerator ETH_PAD_PHY_TXD0
-
enumerator ETH_PAD_RMII_CLK
Header File
This header file can be included with:
#include "esp_eth.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Header File
This header file can be included with:
#include "esp_eth_driver.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Functions
-
esp_err_t esp_eth_driver_install(const esp_eth_config_t *config, esp_eth_handle_t *out_hdl)
Install Ethernet driver.
- 参数:
config -- [in] configuration of the Ethernet driver
out_hdl -- [out] handle of Ethernet driver
- 返回:
ESP_OK: install esp_eth driver successfully
ESP_ERR_INVALID_ARG: install esp_eth driver failed because of some invalid argument
ESP_ERR_NO_MEM: install esp_eth driver failed because there's no memory for driver
ESP_FAIL: install esp_eth driver failed because some other error occurred
-
esp_err_t esp_eth_driver_uninstall(esp_eth_handle_t hdl)
Uninstall Ethernet driver.
备注
It's not recommended to uninstall Ethernet driver unless it won't get used any more in application code. To uninstall Ethernet driver, you have to make sure, all references to the driver are released. Ethernet driver can only be uninstalled successfully when reference counter equals to one.
- 参数:
hdl -- [in] handle of Ethernet driver
- 返回:
ESP_OK: uninstall esp_eth driver successfully
ESP_ERR_INVALID_ARG: uninstall esp_eth driver failed because of some invalid argument
ESP_ERR_INVALID_STATE: uninstall esp_eth driver failed because it has more than one reference
ESP_FAIL: uninstall esp_eth driver failed because some other error occurred
-
esp_err_t esp_eth_start(esp_eth_handle_t hdl)
Start Ethernet driver ONLY in standalone mode (i.e. without TCP/IP stack)
备注
This API will start driver state machine and internal software timer (for checking link status).
- 参数:
hdl -- [in] handle of Ethernet driver
- 返回:
ESP_OK: start esp_eth driver successfully
ESP_ERR_INVALID_ARG: start esp_eth driver failed because of some invalid argument
ESP_ERR_INVALID_STATE: start esp_eth driver failed because driver has started already
ESP_FAIL: start esp_eth driver failed because some other error occurred
-
esp_err_t esp_eth_stop(esp_eth_handle_t hdl)
Stop Ethernet driver.
备注
This function does the opposite operation of
esp_eth_start.- 参数:
hdl -- [in] handle of Ethernet driver
- 返回:
ESP_OK: stop esp_eth driver successfully
ESP_ERR_INVALID_ARG: stop esp_eth driver failed because of some invalid argument
ESP_ERR_INVALID_STATE: stop esp_eth driver failed because driver has not started yet
ESP_FAIL: stop esp_eth driver failed because some other error occurred
-
esp_err_t esp_eth_update_input_path(esp_eth_handle_t hdl, esp_err_t (*stack_input)(esp_eth_handle_t hdl, uint8_t *buffer, uint32_t length, void *priv), void *priv)
Update Ethernet data input path (i.e. specify where to pass the input buffer)
备注
After install driver, Ethernet still don't know where to deliver the input buffer. In fact, this API registers a callback function which get invoked when Ethernet received new packets.
- 参数:
hdl -- [in] handle of Ethernet driver
stack_input -- [in] function pointer, which does the actual process on incoming packets
priv -- [in] private resource, which gets passed to
stack_inputcallback without any modification
- 返回:
ESP_OK: update input path successfully
ESP_ERR_INVALID_ARG: update input path failed because of some invalid argument
ESP_FAIL: update input path failed because some other error occurred
-
esp_err_t esp_eth_update_input_path_info(esp_eth_handle_t hdl, esp_err_t (*stack_input_info)(esp_eth_handle_t hdl, uint8_t *buffer, uint32_t length, void *priv, void *info), void *priv)
Update Ethernet data input path with input function which consumes extra info about received frame.
备注
Extra information may include but is not limited to such info like Time Stamp, CRC check offload result, etc. The MAC layer of the Ethernet driver of the particular device must provide extra information using
stack_input_info()function. Otherwise, input path function registered by this API is not invoked. If this is the case, registerstack_inputfunction byesp_eth_update_input_path()instead.备注
After install driver, Ethernet still don't know where to deliver the input buffer. In fact, this API registers a callback function which get invoked when Ethernet received new packets.
- 参数:
hdl -- [in] handle of Ethernet driver
stack_input_info -- [in] function pointer, which does the actual process on incoming packets
priv -- [in] private resource, which gets passed to
stack_input_infocallback without any modification
- 返回:
ESP_OK: update input path successfully
ESP_ERR_INVALID_ARG: update input path failed because of some invalid argument
ESP_FAIL: update input path failed because some other error occurred
-
esp_err_t esp_eth_transmit(esp_eth_handle_t hdl, void *buf, size_t length)
General Transmit.
- 参数:
hdl -- [in] handle of Ethernet driver
buf -- [in] buffer of the packet to transfer
length -- [in] length of the buffer to transfer
- 返回:
ESP_OK: transmit frame buffer successfully
ESP_ERR_INVALID_ARG: transmit frame buffer failed because of some invalid argument
ESP_ERR_INVALID_STATE: invalid driver state (e.i., driver is not started)
ESP_ERR_TIMEOUT: transmit frame buffer failed because HW was not get available in predefined period
ESP_FAIL: transmit frame buffer failed because some other error occurred
-
esp_err_t esp_eth_transmit_ctrl_vargs(esp_eth_handle_t hdl, void *ctrl, uint32_t argc, ...)
Extended Transmit with variable number of arguments.
备注
Typical intended use case of this function is to assemble Ethernet frame from multiple input buffers at lower layer of the driver (MAC layer) to avoid unnecessary buffer reallocation and copy.
- 参数:
hdl -- handle of Ethernet driver
ctrl -- optional transmit control structure (MAC specific), set to NULL when not required
argc -- number variable arguments
... -- variable arguments
- 返回:
ESP_OK: transmit successful
ESP_ERR_INVALID_STATE: invalid driver state (e.i., driver is not started)
ESP_ERR_TIMEOUT: transmit frame buffer failed because HW was not get available in predefined period
ESP_FAIL: transmit frame buffer failed because some other error occurred
-
esp_err_t esp_eth_ioctl(esp_eth_handle_t hdl, esp_eth_io_cmd_t cmd, void *data)
Misc IO function of Ethernet driver.
The following common IO control commands are supported:
ETH_CMD_S_MAC_ADDRsets Ethernet interface MAC address.dataargument is pointer to MAC address buffer with expected size of 6 bytes.ETH_CMD_G_MAC_ADDRgets Ethernet interface MAC address.dataargument is pointer to a buffer to which MAC address is to be copied. The buffer size must be at least 6 bytes.ETH_CMD_S_PHY_ADDRsets PHY address in range of <0-31>.dataargument is pointer to memory of uint32_t datatype from where the configuration option is read.ETH_CMD_G_PHY_ADDRgets PHY address.dataargument is pointer to memory of uint32_t datatype to which the PHY address is to be stored.ETH_CMD_S_AUTONEGOenables or disables Ethernet link speed and duplex mode autonegotiation.dataargument is pointer to memory of bool datatype from which the configuration option is read. Preconditions: Ethernet driver needs to be stopped.ETH_CMD_G_AUTONEGOgets current configuration of the Ethernet link speed and duplex mode autonegotiation.dataargument is pointer to memory of bool datatype to which the current configuration is to be stored.ETH_CMD_S_SPEEDsets the Ethernet link speed.dataargument is pointer to memory of eth_speed_t datatype from which the configuration option is read. Preconditions: Ethernet driver needs to be stopped and auto-negotiation disabled.ETH_CMD_G_SPEEDgets current Ethernet link speed.dataargument is pointer to memory of eth_speed_t datatype to which the speed is to be stored.ETH_CMD_S_PROMISCUOUSsets/resets Ethernet interface promiscuous mode.dataargument is pointer to memory of bool datatype from which the configuration option is read.ETH_CMD_S_FLOW_CTRLsets/resets Ethernet interface flow control.dataargument is pointer to memory of bool datatype from which the configuration option is read.ETH_CMD_S_DUPLEX_MODEsets the Ethernet duplex mode.dataargument is pointer to memory of eth_duplex_t datatype from which the configuration option is read. Preconditions: Ethernet driver needs to be stopped and auto-negotiation disabled.ETH_CMD_G_DUPLEX_MODEgets current Ethernet link duplex mode.dataargument is pointer to memory of eth_duplex_t datatype to which the duplex mode is to be stored.ETH_CMD_S_PHY_LOOPBACKsets/resets PHY to/from loopback mode.dataargument is pointer to memory of bool datatype from which the configuration option is read.ETH_CMD_S_ALL_MULTICASTsets/resets Ethernet interface to/from receive all multicast mode.dataargument is pointer to memory of bool datatype from which the configuration option is read.ETH_CMD_ADD_MAC_FILTERadds a MAC address to the MAC filter.dataargument is pointer to MAC address buffer with expected size of 6 bytes.ETH_CMD_DEL_MAC_FILTERdeletes a MAC address from the MAC filter.dataargument is pointer to MAC address buffer with expected size of 6 bytes.
Note that additional control commands may be available for specific MAC or PHY chips. Please consult specific MAC or PHY documentation or driver code.
- 参数:
hdl -- [in] handle of Ethernet driver
cmd -- [in] IO control command
data -- [inout] address of data for
setcommand or address where to store the data when used withgetcommand
- 返回:
ESP_OK: process io command successfully
ESP_ERR_INVALID_ARG: process io command failed because of some invalid argument
ESP_FAIL: process io command failed because some other error occurred
ESP_ERR_NOT_SUPPORTED: requested feature is not supported
-
esp_err_t esp_eth_get_phy_instance(esp_eth_handle_t hdl, esp_eth_phy_t **phy)
Get PHY instance memory address.
- 参数:
hdl -- [in] handle of Ethernet driver
phy -- [out] pointer to memory to store the instance
- 返回:
esp_err_t
ESP_OK: success
ESP_ERR_INVALID_ARG: failed because of some invalid argument
-
esp_err_t esp_eth_get_mac_instance(esp_eth_handle_t hdl, esp_eth_mac_t **mac)
Get MAC instance memory address.
- 参数:
hdl -- [in] handle of Ethernet driver
mac -- [out] pointer to memory to store the instance
- 返回:
esp_err_t
ESP_OK: success
ESP_ERR_INVALID_ARG: failed because of some invalid argument
-
esp_err_t esp_eth_increase_reference(esp_eth_handle_t hdl)
Increase Ethernet driver reference.
备注
Ethernet driver handle can be obtained by os timer, netif, etc. It's dangerous when thread A is using Ethernet but thread B uninstall the driver. Using reference counter can prevent such risk, but care should be taken, when you obtain Ethernet driver, this API must be invoked so that the driver won't be uninstalled during your using time.
- 参数:
hdl -- [in] handle of Ethernet driver
- 返回:
ESP_OK: increase reference successfully
ESP_ERR_INVALID_ARG: increase reference failed because of some invalid argument
-
esp_err_t esp_eth_decrease_reference(esp_eth_handle_t hdl)
Decrease Ethernet driver reference.
- 参数:
hdl -- [in] handle of Ethernet driver
- 返回:
ESP_OK: increase reference successfully
ESP_ERR_INVALID_ARG: increase reference failed because of some invalid argument
Structures
-
struct esp_eth_config_t
Configuration of Ethernet driver.
Public Members
-
esp_eth_mac_t *mac
Ethernet MAC object.
-
esp_eth_phy_t *phy
Ethernet PHY object.
-
uint32_t check_link_period_ms
Period time of checking Ethernet link status.
-
esp_err_t (*stack_input)(esp_eth_handle_t eth_handle, uint8_t *buffer, uint32_t length, void *priv)
Input frame buffer to user's stack.
- Param eth_handle:
[in] handle of Ethernet driver
- Param buffer:
[in] frame buffer that will get input to upper stack
- Param length:
[in] length of the frame buffer
- Param priv:
[in] pointer to private resource, defined when registering the input function
- Return:
ESP_OK: input frame buffer to upper stack successfully
ESP_FAIL: error occurred when inputting buffer to upper stack
-
esp_err_t (*stack_input_info)(esp_eth_handle_t eth_handle, uint8_t *buffer, uint32_t length, void *priv, void *info)
Input frame buffer to user's stack with additional information about received frame.
- Param eth_handle:
[in] handle of Ethernet driver
- Param buffer:
[in] frame buffer that will get input to upper stack
- Param length:
[in] length of the frame buffer
- Param priv:
[in] pointer to private resource, defined when registering the input function
- Param info:
[in] extra information about received Ethernet frame (may be timestamp, CRC offload check result, etc.)
- Return:
ESP_OK: input frame buffer to upper stack successfully
ESP_FAIL: error occurred when inputting buffer to upper stack
-
esp_err_t (*on_lowlevel_init_done)(esp_eth_handle_t eth_handle)
Callback function invoked when lowlevel initialization is finished.
- Param eth_handle:
[in] handle of Ethernet driver
- Return:
ESP_OK: process extra lowlevel initialization successfully
ESP_FAIL: error occurred when processing extra lowlevel initialization
-
esp_err_t (*on_lowlevel_deinit_done)(esp_eth_handle_t eth_handle)
Callback function invoked when lowlevel deinitialization is finished.
- Param eth_handle:
[in] handle of Ethernet driver
- Return:
ESP_OK: process extra lowlevel deinitialization successfully
ESP_FAIL: error occurred when processing extra lowlevel deinitialization
-
esp_err_t (*read_phy_reg)(esp_eth_handle_t eth_handle, uint32_t phy_addr, uint32_t phy_reg, uint32_t *reg_value)
Read PHY register.
备注
Usually the PHY register read/write function is provided by MAC (SMI interface), but if the PHY device is managed by other interface (e.g. I2C), then user needs to implement the corresponding read/write. Setting this to NULL means your PHY device is managed by MAC's SMI interface.
- Param eth_handle:
[in] handle of Ethernet driver
- Param phy_addr:
[in] PHY chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[out] PHY register value
- Return:
ESP_OK: read PHY register successfully
ESP_ERR_INVALID_ARG: read PHY register failed because of invalid argument
ESP_ERR_TIMEOUT: read PHY register failed because of timeout
ESP_FAIL: read PHY register failed because some other error occurred
-
esp_err_t (*write_phy_reg)(esp_eth_handle_t eth_handle, uint32_t phy_addr, uint32_t phy_reg, uint32_t reg_value)
Write PHY register.
备注
Usually the PHY register read/write function is provided by MAC (SMI interface), but if the PHY device is managed by other interface (e.g. I2C), then user needs to implement the corresponding read/write. Setting this to NULL means your PHY device is managed by MAC's SMI interface.
- Param eth_handle:
[in] handle of Ethernet driver
- Param phy_addr:
[in] PHY chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[in] PHY register value
- Return:
ESP_OK: write PHY register successfully
ESP_ERR_INVALID_ARG: read PHY register failed because of invalid argument
ESP_ERR_TIMEOUT: write PHY register failed because of timeout
ESP_FAIL: write PHY register failed because some other error occurred
-
esp_eth_mac_t *mac
-
struct esp_eth_phy_reg_rw_data_t
Data structure to Read/Write PHY register via ioctl API.
Macros
-
ETH_DEFAULT_CONFIG(emac, ephy)
Default configuration for Ethernet driver.
-
esp_eth_transmit_vargs(eth_hdl, argc, ...)
Wrapper over Extended Transmit function to ensure backward compatibility.
备注
For new implementations, it is recommended to use
esp_eth_transmit_ctrl_vargs()directly.- 参数:
eth_hdl -- [in] handle of Ethernet driver
argc -- [in] number variable arguments
... -- variable arguments
- 返回:
ESP_OK: transmit successful
ESP_ERR_INVALID_STATE: invalid driver state (e.i., driver is not started)
ESP_ERR_TIMEOUT: transmit frame buffer failed because HW was not get available in predefined period
ESP_FAIL: transmit frame buffer failed because some other error occurred
Type Definitions
-
typedef void *esp_eth_handle_t
Handle of Ethernet driver.
Enumerations
-
enum esp_eth_io_cmd_t
Command list for ioctl API.
Values:
-
enumerator ETH_CMD_G_MAC_ADDR
Get MAC address
-
enumerator ETH_CMD_S_MAC_ADDR
Set MAC address
-
enumerator ETH_CMD_G_PHY_ADDR
Get PHY address
-
enumerator ETH_CMD_S_PHY_ADDR
Set PHY address
-
enumerator ETH_CMD_G_AUTONEGO
Get PHY Auto Negotiation
-
enumerator ETH_CMD_S_AUTONEGO
Set PHY Auto Negotiation
-
enumerator ETH_CMD_G_SPEED
Get Speed
-
enumerator ETH_CMD_S_SPEED
Set Speed
-
enumerator ETH_CMD_S_PROMISCUOUS
Set promiscuous mode
-
enumerator ETH_CMD_S_FLOW_CTRL
Set flow control
-
enumerator ETH_CMD_G_DUPLEX_MODE
Get Duplex mode
-
enumerator ETH_CMD_S_DUPLEX_MODE
Set Duplex mode
-
enumerator ETH_CMD_S_PHY_LOOPBACK
Set PHY loopback
-
enumerator ETH_CMD_READ_PHY_REG
Read PHY register
-
enumerator ETH_CMD_WRITE_PHY_REG
Write PHY register
-
enumerator ETH_CMD_S_ALL_MULTICAST
Set receive all multicast
-
enumerator ETH_CMD_ADD_MAC_FILTER
Add MAC filter
-
enumerator ETH_CMD_DEL_MAC_FILTER
Delete MAC filter
-
enumerator ETH_CMD_CUSTOM_MAC_CMDS
-
enumerator ETH_CMD_CUSTOM_PHY_CMDS
-
enumerator ETH_CMD_G_MAC_ADDR
Header File
This header file can be included with:
#include "esp_eth_com.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Structures
-
struct esp_eth_mediator_s
Ethernet mediator.
Public Members
-
esp_err_t (*phy_reg_read)(esp_eth_mediator_t *eth, uint32_t phy_addr, uint32_t phy_reg, uint32_t *reg_value)
Read PHY register.
- Param eth:
[in] mediator of Ethernet driver
- Param phy_addr:
[in] PHY Chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[out] PHY register value
- Return:
ESP_OK: read PHY register successfully
ESP_FAIL: read PHY register failed because some error occurred
-
esp_err_t (*phy_reg_write)(esp_eth_mediator_t *eth, uint32_t phy_addr, uint32_t phy_reg, uint32_t reg_value)
Write PHY register.
- Param eth:
[in] mediator of Ethernet driver
- Param phy_addr:
[in] PHY Chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[in] PHY register value
- Return:
ESP_OK: write PHY register successfully
ESP_FAIL: write PHY register failed because some error occurred
-
esp_err_t (*stack_input)(esp_eth_mediator_t *eth, uint8_t *buffer, uint32_t length)
Deliver packet to upper stack.
- Param eth:
[in] mediator of Ethernet driver
- Param buffer:
[in] packet buffer
- Param length:
[in] length of the packet
- Return:
ESP_OK: deliver packet to upper stack successfully
ESP_FAIL: deliver packet failed because some error occurred
-
esp_err_t (*stack_input_info)(esp_eth_mediator_t *eth, uint8_t *buffer, uint32_t length, void *info)
Deliver packet to upper stack with additional information about reception.
- Param eth:
[in] mediator of Ethernet driver
- Param buffer:
[in] packet buffer
- Param length:
[in] length of the packet
- Param info:
[in] info associated with reception (e.g. time stamp)
- Return:
ESP_OK: deliver packet to upper stack successfully
ESP_FAIL: deliver packet failed because some error occurred
-
esp_err_t (*on_state_changed)(esp_eth_mediator_t *eth, esp_eth_state_t state, void *args)
Callback on Ethernet state changed.
- Param eth:
[in] mediator of Ethernet driver
- Param state:
[in] new state
- Param args:
[in] optional argument for the new state
- Return:
ESP_OK: process the new state successfully
ESP_FAIL: process the new state failed because some error occurred
-
esp_err_t (*phy_reg_read)(esp_eth_mediator_t *eth, uint32_t phy_addr, uint32_t phy_reg, uint32_t *reg_value)
Macros
-
ETH_CMD_CUSTOM_MAC_CMDS_OFFSET
Offset for start of MAC custom ioctl commands.
-
ETH_CMD_CUSTOM_PHY_CMDS_OFFSET
Offset for start of PHY custom ioctl commands.
Type Definitions
-
typedef struct esp_eth_mediator_s esp_eth_mediator_t
Ethernet mediator.
Enumerations
-
enum esp_eth_state_t
Ethernet driver state.
Values:
-
enumerator ETH_STATE_LLINIT
Lowlevel init done
-
enumerator ETH_STATE_DEINIT
Deinit done
-
enumerator ETH_STATE_LINK
Link status changed
-
enumerator ETH_STATE_SPEED
Speed updated
-
enumerator ETH_STATE_DUPLEX
Duplex updated
-
enumerator ETH_STATE_PAUSE
Pause ability updated
-
enumerator ETH_STATE_LLINIT
Header File
This header file can be included with:
#include "esp_eth_mac.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Structures
-
struct esp_eth_mac_s
Ethernet MAC.
Public Members
-
esp_err_t (*set_mediator)(esp_eth_mac_t *mac, esp_eth_mediator_t *eth)
Set mediator for Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Param eth:
[in] Ethernet mediator
- Return:
ESP_OK: set mediator for Ethernet MAC successfully
ESP_ERR_INVALID_ARG: set mediator for Ethernet MAC failed because of invalid argument
-
esp_err_t (*init)(esp_eth_mac_t *mac)
Initialize Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Return:
ESP_OK: initialize Ethernet MAC successfully
ESP_ERR_TIMEOUT: initialize Ethernet MAC failed because of timeout
ESP_FAIL: initialize Ethernet MAC failed because some other error occurred
-
esp_err_t (*deinit)(esp_eth_mac_t *mac)
Deinitialize Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Return:
ESP_OK: deinitialize Ethernet MAC successfully
ESP_FAIL: deinitialize Ethernet MAC failed because some error occurred
-
esp_err_t (*start)(esp_eth_mac_t *mac)
Start Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Return:
ESP_OK: start Ethernet MAC successfully
ESP_FAIL: start Ethernet MAC failed because some other error occurred
-
esp_err_t (*stop)(esp_eth_mac_t *mac)
Stop Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Return:
ESP_OK: stop Ethernet MAC successfully
ESP_FAIL: stop Ethernet MAC failed because some error occurred
-
esp_err_t (*transmit)(esp_eth_mac_t *mac, uint8_t *buf, uint32_t length)
Transmit packet from Ethernet MAC.
备注
Returned error codes may differ for each specific MAC chip.
- Param mac:
[in] Ethernet MAC instance
- Param buf:
[in] packet buffer to transmit
- Param length:
[in] length of packet
- Return:
ESP_OK: transmit packet successfully
ESP_ERR_INVALID_SIZE: number of actually sent bytes differs to expected
ESP_FAIL: transmit packet failed because some other error occurred
-
esp_err_t (*transmit_ctrl_vargs)(esp_eth_mac_t *mac, void *ctrl, uint32_t argc, va_list args)
Transmit packet with extended control from Ethernet MAC and constructed with special parameters at Layer2.
备注
Typical intended use case is to make possible to construct a frame from multiple higher layer buffers without a need of buffer reallocations. However, other use cases are not limited.
备注
Returned error codes may differ for each specific MAC chip.
- Param mac:
[in] Ethernet MAC instance
- Param ctrl:
[in] optional transmit control structure (chip specific), set to NULL when not required
- Param argc:
[in] number variable arguments
- Param args:
[in] variable arguments
- Return:
ESP_OK: transmit packet successfully
ESP_ERR_INVALID_SIZE: number of actually sent bytes differs to expected
ESP_FAIL: transmit packet failed because some other error occurred
-
esp_err_t (*transmit_vargs)(esp_eth_mac_t *mac, uint32_t argc, va_list args)
Transmit packet from Ethernet MAC constructed with special parameters at Layer2.
备注
Typical intended use case is to make possible to construct a frame from multiple higher layer buffers without a need of buffer reallocations. However, other use cases are not limited.
备注
Returned error codes may differ for each specific MAC chip.
警告
Deprecated, use
transmit_ctrl_vargs()function instead.- Param mac:
[in] Ethernet MAC instance
- Param argc:
[in] number variable arguments
- Param args:
[in] variable arguments
- Return:
ESP_OK: transmit packet successfully
ESP_ERR_INVALID_SIZE: number of actually sent bytes differs to expected
ESP_FAIL: transmit packet failed because some other error occurred
-
esp_err_t (*receive)(esp_eth_mac_t *mac, uint8_t *buf, uint32_t *length)
Receive packet from Ethernet MAC.
备注
Memory of buf is allocated in the Layer2, make sure it get free after process.
备注
Before this function got invoked, the value of "length" should set by user, equals the size of buffer. After the function returned, the value of "length" means the real length of received data.
- Param mac:
[in] Ethernet MAC instance
- Param buf:
[out] packet buffer which will preserve the received frame
- Param length:
[out] length of the received packet
- Return:
ESP_OK: receive packet successfully
ESP_ERR_INVALID_ARG: receive packet failed because of invalid argument
ESP_ERR_INVALID_SIZE: input buffer size is not enough to hold the incoming data. in this case, value of returned "length" indicates the real size of incoming data.
ESP_FAIL: receive packet failed because some other error occurred
-
esp_err_t (*read_phy_reg)(esp_eth_mac_t *mac, uint32_t phy_addr, uint32_t phy_reg, uint32_t *reg_value)
Read PHY register.
- Param mac:
[in] Ethernet MAC instance
- Param phy_addr:
[in] PHY chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[out] PHY register value
- Return:
ESP_OK: read PHY register successfully
ESP_ERR_INVALID_ARG: read PHY register failed because of invalid argument
ESP_ERR_INVALID_STATE: read PHY register failed because of wrong state of MAC
ESP_ERR_TIMEOUT: read PHY register failed because of timeout
ESP_FAIL: read PHY register failed because some other error occurred
-
esp_err_t (*write_phy_reg)(esp_eth_mac_t *mac, uint32_t phy_addr, uint32_t phy_reg, uint32_t reg_value)
Write PHY register.
- Param mac:
[in] Ethernet MAC instance
- Param phy_addr:
[in] PHY chip address (0~31)
- Param phy_reg:
[in] PHY register index code
- Param reg_value:
[in] PHY register value
- Return:
ESP_OK: write PHY register successfully
ESP_ERR_INVALID_STATE: write PHY register failed because of wrong state of MAC
ESP_ERR_TIMEOUT: write PHY register failed because of timeout
ESP_FAIL: write PHY register failed because some other error occurred
-
esp_err_t (*set_addr)(esp_eth_mac_t *mac, uint8_t *addr)
Set MAC address.
- Param mac:
[in] Ethernet MAC instance
- Param addr:
[in] MAC address
- Return:
ESP_OK: set MAC address successfully
ESP_ERR_INVALID_ARG: set MAC address failed because of invalid argument
ESP_FAIL: set MAC address failed because some other error occurred
-
esp_err_t (*get_addr)(esp_eth_mac_t *mac, uint8_t *addr)
Get MAC address.
- Param mac:
[in] Ethernet MAC instance
- Param addr:
[out] MAC address
- Return:
ESP_OK: get MAC address successfully
ESP_ERR_INVALID_ARG: get MAC address failed because of invalid argument
ESP_FAIL: get MAC address failed because some other error occurred
-
esp_err_t (*add_mac_filter)(esp_eth_mac_t *mac, uint8_t *addr)
Add Destination address MAC filter.
- Param mac:
[in] Ethernet MAC instance
- Param addr:
[in] MAC address
- Return:
ESP_OK: add MAC filter successfully
ESP_FAIL: add MAC filter failed because some error occurred
-
esp_err_t (*rm_mac_filter)(esp_eth_mac_t *mac, uint8_t *addr)
Remove Destination address MAC filter.
- Param mac:
[in] Ethernet MAC instance
- Param addr:
[in] MAC address
- Return:
ESP_OK: remove MAC filter successfully
ESP_FAIL: remove MAC filter failed because some error occurred
-
esp_err_t (*set_speed)(esp_eth_mac_t *mac, eth_speed_t speed)
Set speed of MAC.
- Param ma:c:
[in] Ethernet MAC instance
- Param speed:
[in] MAC speed
- Return:
ESP_OK: set MAC speed successfully
ESP_ERR_INVALID_ARG: set MAC speed failed because of invalid argument
ESP_FAIL: set MAC speed failed because some other error occurred
-
esp_err_t (*set_duplex)(esp_eth_mac_t *mac, eth_duplex_t duplex)
Set duplex mode of MAC.
- Param mac:
[in] Ethernet MAC instance
- Param duplex:
[in] MAC duplex
- Return:
ESP_OK: set MAC duplex mode successfully
ESP_ERR_INVALID_ARG: set MAC duplex failed because of invalid argument
ESP_FAIL: set MAC duplex failed because some other error occurred
-
esp_err_t (*set_link)(esp_eth_mac_t *mac, eth_link_t link)
Set link status of MAC.
- Param mac:
[in] Ethernet MAC instance
- Param link:
[in] Link status
- Return:
ESP_OK: set link status successfully
ESP_ERR_INVALID_ARG: set link status failed because of invalid argument
ESP_FAIL: set link status failed because some other error occurred
-
esp_err_t (*set_promiscuous)(esp_eth_mac_t *mac, bool enable)
Set promiscuous of MAC.
- Param mac:
[in] Ethernet MAC instance
- Param enable:
[in] set true to enable promiscuous mode; set false to disable promiscuous mode
- Return:
ESP_OK: set promiscuous mode successfully
ESP_FAIL: set promiscuous mode failed because some error occurred
-
esp_err_t (*set_all_multicast)(esp_eth_mac_t *mac, bool enable)
Set receive all multicast.
- Param mac:
[in] Ethernet MAC instance
- Param enable:
[in] set true to enable receive all multicast; set false to disable receive all multicast
- Return:
ESP_OK: set receive all multicast successfully
ESP_FAIL: set receive all multicast failed because some error occurred
-
esp_err_t (*enable_flow_ctrl)(esp_eth_mac_t *mac, bool enable)
Enable flow control on MAC layer or not.
- Param mac:
[in] Ethernet MAC instance
- Param enable:
[in] set true to enable flow control; set false to disable flow control
- Return:
ESP_OK: set flow control successfully
ESP_FAIL: set flow control failed because some error occurred
-
esp_err_t (*set_peer_pause_ability)(esp_eth_mac_t *mac, uint32_t ability)
Set the PAUSE ability of peer node.
- Param mac:
[in] Ethernet MAC instance
- Param ability:
[in] zero indicates that pause function is supported by link partner; non-zero indicates that pause function is not supported by link partner
- Return:
ESP_OK: set peer pause ability successfully
ESP_FAIL: set peer pause ability failed because some error occurred
-
esp_err_t (*custom_ioctl)(esp_eth_mac_t *mac, int cmd, void *data)
Custom IO function of MAC driver. This function is intended to extend common options of esp_eth_ioctl to cover specifics of MAC chip.
备注
This function may not be assigned when the MAC chip supports only most common set of configuration options.
- Param mac:
[in] Ethernet MAC instance
- Param cmd:
[in] IO control command
- Param data:
[inout] address of data for
setcommand or address where to store the data when used withgetcommand- Return:
ESP_OK: process io command successfully
ESP_ERR_INVALID_ARG: process io command failed because of some invalid argument
ESP_FAIL: process io command failed because some other error occurred
ESP_ERR_NOT_SUPPORTED: requested feature is not supported
-
esp_err_t (*del)(esp_eth_mac_t *mac)
Free memory of Ethernet MAC.
- Param mac:
[in] Ethernet MAC instance
- Return:
ESP_OK: free Ethernet MAC instance successfully
ESP_FAIL: free Ethernet MAC instance failed because some error occurred
-
esp_err_t (*set_mediator)(esp_eth_mac_t *mac, esp_eth_mediator_t *eth)
-
struct eth_mac_time_t
Ethernet MAC Time Stamp.
-
struct eth_mac_config_t
Configuration of Ethernet MAC object.
Macros
-
ETH_MAC_FLAG_WORK_WITH_CACHE_DISABLE
MAC driver can work when cache is disabled
-
ETH_MAC_FLAG_PIN_TO_CORE
Pin MAC task to the CPU core where driver installation happened
-
ETH_MAC_DEFAULT_CONFIG()
Default configuration for Ethernet MAC object.
Type Definitions
-
typedef struct esp_eth_mac_s esp_eth_mac_t
Ethernet MAC.
Header File
This header file can be included with:
#include "esp_eth_mac_esp.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Header File
This header file can be included with:
#include "esp_eth_mac_spi.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Structures
-
struct eth_spi_custom_driver_config_t
Custom SPI Driver Configuration. This structure declares configuration and callback functions to access Ethernet SPI module via user's custom SPI driver.
Public Members
-
void *config
Custom driver specific configuration data used by
init()function.备注
Type and its content is fully under user's control
-
void *(*init)(const void *spi_config)
Custom driver SPI Initialization.
备注
return type and its content is fully under user's control
- Param spi_config:
[in] Custom driver specific configuration
- Return:
spi_ctx: when initialization is successful, a pointer to context structure holding all variables needed for subsequent SPI access operations (e.g. SPI bus identification, mutexes, etc.)
NULL: driver initialization failed
-
esp_err_t (*deinit)(void *spi_ctx)
Custom driver De-initialization.
- Param spi_ctx:
[in] a pointer to driver specific context structure
- Return:
ESP_OK: driver de-initialization was successful
ESP_FAIL: driver de-initialization failed
any other failure codes are allowed to be used to provide failure isolation
-
esp_err_t (*read)(void *spi_ctx, uint32_t cmd, uint32_t addr, void *data, uint32_t data_len)
Custom driver SPI read.
备注
The read function is responsible to construct command, address and data fields of the SPI frame in format expected by particular SPI Ethernet module
- Param spi_ctx:
[in] a pointer to driver specific context structure
- Param cmd:
[in] command
- Param addr:
[in] register address
- Param data:
[out] read data
- Param data_len:
[in] read data length in bytes
- Return:
ESP_OK: read was successful
ESP_FAIL: read failed
any other failure codes are allowed to be used to provide failure isolation
-
esp_err_t (*write)(void *spi_ctx, uint32_t cmd, uint32_t addr, const void *data, uint32_t data_len)
Custom driver SPI write.
备注
The write function is responsible to construct command, address and data fields of the SPI frame in format expected by particular SPI Ethernet module
- Param spi_ctx:
[in] a pointer to driver specific context structure
- Param cmd:
[in] command
- Param addr:
[in] register address
- Param data:
[in] data to write
- Param data_len:
[in] length of data to write in bytes
- Return:
ESP_OK: write was successful
ESP_FAIL: write failed
any other failure codes are allowed to be used to provide failure isolation
-
void *config
Macros
-
ETH_DEFAULT_SPI
Default configuration of the custom SPI driver. Internal ESP-IDF SPI Master driver is used by default.
Header File
This header file can be included with:
#include "esp_eth_phy.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Functions
-
esp_eth_phy_t *esp_eth_phy_new_generic(const eth_phy_config_t *config)
Create a PHY instance of generic chip which conforms with IEEE 802.3.
备注
Default reset timing configuration is set conservatively(see internals of the function). If you need faster response and your chip supports it, configure it via
configparameter.警告
While basic functionality should always work, some specific features might be limited, even if the PHY meets IEEE 802.3 standard. A typical example is loopback functionality, where certain PHYs may require setting a specific speed mode to operate correctly.
- 参数:
config -- [in] configuration of PHY
- 返回:
instance: create PHY instance successfully
NULL: create PHY instance failed because some error occurred
Structures
-
struct esp_eth_phy_s
Ethernet PHY.
Public Members
-
esp_err_t (*set_mediator)(esp_eth_phy_t *phy, esp_eth_mediator_t *mediator)
Set mediator for PHY.
- Param phy:
[in] Ethernet PHY instance
- Param mediator:
[in] mediator of Ethernet driver
- Return:
ESP_OK: set mediator for Ethernet PHY instance successfully
ESP_ERR_INVALID_ARG: set mediator for Ethernet PHY instance failed because of some invalid arguments
-
esp_err_t (*reset)(esp_eth_phy_t *phy)
Software Reset Ethernet PHY.
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: reset Ethernet PHY successfully
ESP_FAIL: reset Ethernet PHY failed because some error occurred
-
esp_err_t (*reset_hw)(esp_eth_phy_t *phy)
Hardware Reset Ethernet PHY.
备注
Hardware reset is mostly done by pull down and up PHY's nRST pin
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: reset Ethernet PHY successfully
ESP_FAIL: reset Ethernet PHY failed because some error occurred
-
esp_err_t (*init)(esp_eth_phy_t *phy)
Initialize Ethernet PHY.
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: initialize Ethernet PHY successfully
ESP_FAIL: initialize Ethernet PHY failed because some error occurred
-
esp_err_t (*deinit)(esp_eth_phy_t *phy)
Deinitialize Ethernet PHY.
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: deinitialize Ethernet PHY successfully
ESP_FAIL: deinitialize Ethernet PHY failed because some error occurred
-
esp_err_t (*autonego_ctrl)(esp_eth_phy_t *phy, eth_phy_autoneg_cmd_t cmd, bool *autonego_en_stat)
Configure auto negotiation.
- Param phy:
[in] Ethernet PHY instance
- Param cmd:
[in] Configuration command, it is possible to Enable (restart), Disable or get current status of PHY auto negotiation
- Param autonego_en_stat:
[out] Address where to store current status of auto negotiation configuration
- Return:
ESP_OK: restart auto negotiation successfully
ESP_FAIL: restart auto negotiation failed because some error occurred
ESP_ERR_INVALID_ARG: invalid command
-
esp_err_t (*get_link)(esp_eth_phy_t *phy)
Get Ethernet PHY link status.
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: get Ethernet PHY link status successfully
ESP_FAIL: get Ethernet PHY link status failed because some error occurred
-
esp_err_t (*set_link)(esp_eth_phy_t *phy, eth_link_t link)
Set Ethernet PHY link status.
- Param phy:
[in] Ethernet PHY instance
- Param link:
[in] new link status
- Return:
ESP_OK: set Ethernet PHY link status successfully
ESP_FAIL: set Ethernet PHY link status failed because some error occurred
-
esp_err_t (*pwrctl)(esp_eth_phy_t *phy, bool enable)
Power control of Ethernet PHY.
- Param phy:
[in] Ethernet PHY instance
- Param enable:
[in] set true to power on Ethernet PHY; ser false to power off Ethernet PHY
- Return:
ESP_OK: control Ethernet PHY power successfully
ESP_FAIL: control Ethernet PHY power failed because some error occurred
-
esp_err_t (*set_addr)(esp_eth_phy_t *phy, uint32_t addr)
Set PHY chip address.
- Param phy:
[in] Ethernet PHY instance
- Param addr:
[in] PHY chip address
- Return:
ESP_OK: set Ethernet PHY address successfully
ESP_FAIL: set Ethernet PHY address failed because some error occurred
-
esp_err_t (*get_addr)(esp_eth_phy_t *phy, uint32_t *addr)
Get PHY chip address.
- Param phy:
[in] Ethernet PHY instance
- Param addr:
[out] PHY chip address
- Return:
ESP_OK: get Ethernet PHY address successfully
ESP_ERR_INVALID_ARG: get Ethernet PHY address failed because of invalid argument
-
esp_err_t (*advertise_pause_ability)(esp_eth_phy_t *phy, uint32_t ability)
Advertise pause function supported by MAC layer.
- Param phy:
[in] Ethernet PHY instance
- Param addr:
[out] Pause ability
- Return:
ESP_OK: Advertise pause ability successfully
ESP_ERR_INVALID_ARG: Advertise pause ability failed because of invalid argument
-
esp_err_t (*loopback)(esp_eth_phy_t *phy, bool enable)
Sets the PHY to loopback mode.
- Param phy:
[in] Ethernet PHY instance
- Param enable:
[in] enables or disables PHY loopback
- Return:
ESP_OK: PHY instance loopback mode has been configured successfully
ESP_FAIL: PHY instance loopback configuration failed because some error occurred
-
esp_err_t (*set_speed)(esp_eth_phy_t *phy, eth_speed_t speed)
Sets PHY speed mode.
备注
Autonegotiation feature needs to be disabled prior to calling this function for the new setting to be applied
- Param phy:
[in] Ethernet PHY instance
- Param speed:
[in] Speed mode to be set
- Return:
ESP_OK: PHY instance speed mode has been configured successfully
ESP_FAIL: PHY instance speed mode configuration failed because some error occurred
-
esp_err_t (*set_duplex)(esp_eth_phy_t *phy, eth_duplex_t duplex)
Sets PHY duplex mode.
备注
Autonegotiation feature needs to be disabled prior to calling this function for the new setting to be applied
- Param phy:
[in] Ethernet PHY instance
- Param duplex:
[in] Duplex mode to be set
- Return:
ESP_OK: PHY instance duplex mode has been configured successfully
ESP_FAIL: PHY instance duplex mode configuration failed because some error occurred
-
esp_err_t (*custom_ioctl)(esp_eth_phy_t *phy, int cmd, void *data)
Custom IO function of PHY driver. This function is intended to extend common options of esp_eth_ioctl to cover specifics of PHY chip.
备注
This function may not be assigned when the PHY chip supports only most common set of configuration options.
- Param phy:
[in] Ethernet PHY instance
- Param cmd:
[in] IO control command
- Param data:
[inout] address of data for
setcommand or address where to store the data when used withgetcommand- Return:
ESP_OK: process io command successfully
ESP_ERR_INVALID_ARG: process io command failed because of some invalid argument
ESP_FAIL: process io command failed because some other error occurred
ESP_ERR_NOT_SUPPORTED: requested feature is not supported
-
esp_err_t (*del)(esp_eth_phy_t *phy)
Free memory of Ethernet PHY instance.
- Param phy:
[in] Ethernet PHY instance
- Return:
ESP_OK: free PHY instance successfully
ESP_FAIL: free PHY instance failed because some error occurred
-
esp_err_t (*set_mediator)(esp_eth_phy_t *phy, esp_eth_mediator_t *mediator)
-
struct eth_phy_config_t
Ethernet PHY configuration.
Public Members
-
int32_t phy_addr
PHY address, set -1 to enable PHY address detection at initialization stage
-
uint32_t reset_timeout_ms
Reset timeout value (Unit: ms)
-
uint32_t autonego_timeout_ms
Auto-negotiation timeout value (Unit: ms)
-
int reset_gpio_num
Reset GPIO number, -1 means no hardware reset
-
int32_t hw_reset_assert_time_us
Time the reset pin is asserted (Unit: us), 0 to use chip specific default
-
int32_t post_hw_reset_delay_ms
Time to wait after the HW reset (Unit: ms), 0 to use chip specific default, -1 means no wait
-
int32_t phy_addr
Macros
-
ESP_ETH_PHY_ADDR_AUTO
-
ESP_ETH_NO_POST_HW_RESET_DELAY
-
ETH_PHY_DEFAULT_CONFIG()
Default configuration for Ethernet PHY object.
Type Definitions
-
typedef struct esp_eth_phy_s esp_eth_phy_t
Ethernet PHY.
Enumerations
Header File
This header file can be included with:
#include "esp_eth_phy_802_3.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Functions
-
esp_err_t esp_eth_phy_802_3_set_mediator(phy_802_3_t *phy_802_3, esp_eth_mediator_t *eth)
Set Ethernet mediator.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
eth -- Ethernet mediator pointer
- 返回:
ESP_OK: Ethermet mediator set successfully
ESP_ERR_INVALID_ARG: if
ethisNULL
-
esp_err_t esp_eth_phy_802_3_reset(phy_802_3_t *phy_802_3)
Reset PHY.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: Ethernet PHY reset successfully
ESP_FAIL: reset Ethernet PHY failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_autonego_ctrl(phy_802_3_t *phy_802_3, eth_phy_autoneg_cmd_t cmd, bool *autonego_en_stat)
Control autonegotiation mode of Ethernet PHY.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
cmd -- autonegotiation command enumeration
autonego_en_stat -- [out] autonegotiation enabled flag
- 返回:
ESP_OK: Ethernet PHY autonegotiation configured successfully
ESP_FAIL: Ethernet PHY autonegotiation configuration fail because some error occurred
ESP_ERR_INVALID_ARG: invalid value of
cmd
-
esp_err_t esp_eth_phy_802_3_updt_link_dup_spd(phy_802_3_t *phy_802_3)
Retrieve link status and propagate the status to higher layers if the status changed.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: Ethernet PHY link status retrieved successfully
ESP_FAIL: Error occurred during reading registry
-
esp_err_t esp_eth_phy_802_3_pwrctl(phy_802_3_t *phy_802_3, bool enable)
Power control of Ethernet PHY.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
enable -- set true to power ON Ethernet PHY; set false to power OFF Ethernet PHY
- 返回:
ESP_OK: Ethernet PHY power down mode set successfully
ESP_FAIL: Ethernet PHY power up or power down failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_set_addr(phy_802_3_t *phy_802_3, uint32_t addr)
Set Ethernet PHY address.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
addr -- new PHY address
- 返回:
ESP_OK: Ethernet PHY address set
-
esp_err_t esp_eth_phy_802_3_get_addr(phy_802_3_t *phy_802_3, uint32_t *addr)
Get Ethernet PHY address.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
addr -- [out] Ethernet PHY address
- 返回:
ESP_OK: Ethernet PHY address read successfully
ESP_ERR_INVALID_ARG:
addrpointer isNULL
-
esp_err_t esp_eth_phy_802_3_advertise_pause_ability(phy_802_3_t *phy_802_3, uint32_t ability)
Advertise pause function ability.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
ability -- enable or disable pause ability
- 返回:
ESP_OK: pause ability set successfully
ESP_FAIL: Advertise pause function ability failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_loopback(phy_802_3_t *phy_802_3, bool enable)
Set Ethernet PHY loopback mode.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
enable -- set true to enable loopback; set false to disable loopback
- 返回:
ESP_OK: Ethernet PHY loopback mode set successfully
ESP_FAIL: Ethernet PHY loopback configuration failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_set_speed(phy_802_3_t *phy_802_3, eth_speed_t speed)
Set Ethernet PHY speed.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
speed -- new speed of Ethernet PHY link
- 返回:
ESP_OK: Ethernet PHY speed set successfully
ESP_FAIL: Set Ethernet PHY speed failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_set_duplex(phy_802_3_t *phy_802_3, eth_duplex_t duplex)
Set Ethernet PHY duplex mode.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
duplex -- new duplex mode for Ethernet PHY link
- 返回:
ESP_OK: Ethernet PHY duplex mode set successfully
ESP_ERR_INVALID_STATE: unable to set duplex mode to Half if loopback is enabled
ESP_FAIL: Set Ethernet PHY duplex mode failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_set_link(phy_802_3_t *phy_802_3, eth_link_t link)
Set Ethernet PHY link status.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
link -- new link status
- 返回:
ESP_OK: Ethernet PHY link set successfully
-
esp_err_t esp_eth_phy_802_3_init(phy_802_3_t *phy_802_3)
Initialize Ethernet PHY.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: Ethernet PHY initialized successfully
-
esp_err_t esp_eth_phy_802_3_deinit(phy_802_3_t *phy_802_3)
Power off Eternet PHY.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: Ethernet PHY powered off successfully
-
esp_err_t esp_eth_phy_802_3_del(phy_802_3_t *phy_802_3)
Delete Ethernet PHY infostructure.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: Ethernet PHY infostructure deleted
-
esp_err_t esp_eth_phy_802_3_reset_hw(phy_802_3_t *phy_802_3)
Performs hardware reset with internal timing configuration defined during initialization.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: reset Ethernet PHY successfully
ESP_ERR_NOT_ALLOWED: reset GPIO not defined
-
esp_err_t esp_eth_phy_802_3_detect_phy_addr(esp_eth_mediator_t *eth, int *detected_addr)
Detect PHY address.
- 参数:
eth -- Mediator of Ethernet driver
detected_addr -- [out] a valid address after detection
- 返回:
ESP_OK: detect phy address successfully
ESP_ERR_INVALID_ARG: invalid parameter
ESP_ERR_NOT_FOUND: can't detect any PHY device
ESP_FAIL: detect phy address failed because some error occurred
-
esp_err_t esp_eth_phy_802_3_basic_phy_init(phy_802_3_t *phy_802_3)
Performs basic PHY chip initialization.
备注
It should be called as the first function in PHY specific driver instance
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: initialized Ethernet PHY successfully
ESP_FAIL: initialization of Ethernet PHY failed because some error occurred
ESP_ERR_INVALID_ARG: invalid argument
ESP_ERR_NOT_FOUND: PHY device not detected
ESP_ERR_TIMEOUT: MII Management read/write operation timeout
ESP_ERR_INVALID_STATE: PHY is in invalid state to perform requested operation
-
esp_err_t esp_eth_phy_802_3_basic_phy_deinit(phy_802_3_t *phy_802_3)
Performs basic PHY chip de-initialization.
备注
It should be called as the last function in PHY specific driver instance
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
- 返回:
ESP_OK: de-initialized Ethernet PHY successfully
ESP_FAIL: de-initialization of Ethernet PHY failed because some error occurred
ESP_ERR_TIMEOUT: MII Management read/write operation timeout
ESP_ERR_INVALID_STATE: PHY is in invalid state to perform requested operation
-
esp_err_t esp_eth_phy_802_3_read_oui(phy_802_3_t *phy_802_3, uint32_t *oui)
Reads raw content of OUI field.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
oui -- [out] OUI value
- 返回:
ESP_OK: OUI field read successfully
ESP_FAIL: OUI field read failed because some error occurred
ESP_ERR_INVALID_ARG: invalid
ouiargumentESP_ERR_TIMEOUT: MII Management read/write operation timeout
ESP_ERR_INVALID_STATE: PHY is in invalid state to perform requested operation
-
esp_err_t esp_eth_phy_802_3_read_manufac_info(phy_802_3_t *phy_802_3, uint8_t *model, uint8_t *rev)
Reads manufacturer’s model and revision number.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
model -- [out] Manufacturer’s model number (can be NULL when not required)
rev -- [out] Manufacturer’s revision number (can be NULL when not required)
- 返回:
ESP_OK: Manufacturer’s info read successfully
ESP_FAIL: Manufacturer’s info read failed because some error occurred
ESP_ERR_TIMEOUT: MII Management read/write operation timeout
ESP_ERR_INVALID_STATE: PHY is in invalid state to perform requested operation
-
esp_err_t esp_eth_phy_802_3_get_mmd_addr(phy_802_3_t *phy_802_3, uint8_t devaddr, uint16_t *mmd_addr)
Reads MDIO device's internal address register.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
mmd_addr -- [out] Current address stored in device's register
- 返回:
ESP_OK: Address register read successfully
ESP_FAIL: Address register read failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits)
-
esp_err_t esp_eth_phy_802_3_set_mmd_addr(phy_802_3_t *phy_802_3, uint8_t devaddr, uint16_t mmd_addr)
Write to DIO device's internal address register.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
mmd_addr -- [out] New value of MDIO device's address register value
- 返回:
ESP_OK: Address register written to successfully
ESP_FAIL: Address register write failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits)
-
esp_err_t esp_eth_phy_802_3_read_mmd_data(phy_802_3_t *phy_802_3, uint8_t devaddr, esp_eth_phy_802_3_mmd_func_t function, uint32_t *data)
Read data of MDIO device's memory at address register.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
function -- MMD function
data -- [out] Data read from the device's memory
- 返回:
ESP_OK: Memory read successfully
ESP_FAIL: Memory read failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits) or MMD access function is invalid
-
esp_err_t esp_eth_phy_802_3_write_mmd_data(phy_802_3_t *phy_802_3, uint8_t devaddr, esp_eth_phy_802_3_mmd_func_t function, uint32_t data)
Write data to MDIO device's memory at address register.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
function -- MMD function
data -- [out] Data to write to the device's memory
- 返回:
ESP_OK: Memory written successfully
ESP_FAIL: Memory write failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits) or MMD access function is invalid
-
esp_err_t esp_eth_phy_802_3_read_mmd_register(phy_802_3_t *phy_802_3, uint8_t devaddr, uint16_t mmd_addr, uint32_t *data)
Set MMD address to mmd_addr with function MMD_FUNC_NOINCR and read contents to *data.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
mmd_addr -- Address of MDIO device register
data -- [out] Data read from the device's memory
- 返回:
ESP_OK: Memory read successfully
ESP_FAIL: Memory read failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits)
-
esp_err_t esp_eth_phy_802_3_write_mmd_register(phy_802_3_t *phy_802_3, uint8_t devaddr, uint16_t mmd_addr, uint32_t data)
Set MMD address to mmd_addr with function MMD_FUNC_NOINCR and write data.
- 参数:
phy_802_3 -- IEEE 802.3 PHY object infostructure
devaddr -- Address of MDIO device
mmd_addr -- Address of MDIO device register
data -- [out] Data to write to the device's memory
- 返回:
ESP_OK: Memory written to successfully
ESP_FAIL: Memory write failed because of some error occurred
ESP_ERR_INVALID_ARG: Device address provided is out of range (hardware limits device address to 5 bits)
-
inline phy_802_3_t *esp_eth_phy_into_phy_802_3(esp_eth_phy_t *phy)
Returns address to parent IEEE 802.3 PHY object infostructure.
- 参数:
phy -- Ethernet PHY instance
- 返回:
phy_802_3_t*
address to parent IEEE 802.3 PHY object infostructure
-
esp_err_t esp_eth_phy_802_3_obj_config_init(phy_802_3_t *phy_802_3, const eth_phy_config_t *config)
Initializes configuration of parent IEEE 802.3 PHY object infostructure.
- 参数:
phy_802_3 -- Address to IEEE 802.3 PHY object infostructure
config -- Configuration of the IEEE 802.3 PHY object
- 返回:
ESP_OK: configuration initialized successfully
ESP_ERR_INVALID_ARG: invalid
configargument
Structures
-
struct phy_802_3_t
IEEE 802.3 PHY object infostructure.
Public Members
-
esp_eth_phy_t parent
Parent Ethernet PHY instance
-
esp_eth_mediator_t *eth
Mediator of Ethernet driver
-
int addr
PHY address
-
uint32_t reset_timeout_ms
Reset timeout value (Unit: ms)
-
uint32_t autonego_timeout_ms
Auto-negotiation timeout value (Unit: ms)
-
eth_link_t link_status
Current Link status
-
int reset_gpio_num
Reset GPIO number, -1 means no hardware reset
-
int32_t hw_reset_assert_time_us
Time the reset pin is asserted (Unit: us)
-
int32_t post_hw_reset_delay_ms
Time to wait after the HW reset (Unit: ms)
-
esp_eth_phy_t parent
Enumerations
Header File
This header file can be included with:
#include "esp_eth_netif_glue.h"
This header file is a part of the API provided by the
esp_ethcomponent. To declare that your component depends onesp_eth, add the following to your CMakeLists.txt:REQUIRES esp_eth
or
PRIV_REQUIRES esp_eth
Functions
-
esp_eth_netif_glue_handle_t esp_eth_new_netif_glue(esp_eth_handle_t eth_hdl)
Create a netif glue for Ethernet driver.
备注
netif glue is used to attach io driver to TCP/IP netif
- 参数:
eth_hdl -- Ethernet driver handle
- 返回:
glue object, which inherits esp_netif_driver_base_t
-
esp_err_t esp_eth_del_netif_glue(esp_eth_netif_glue_handle_t eth_netif_glue)
Delete netif glue of Ethernet driver.
- 参数:
eth_netif_glue -- netif glue
- 返回:
-ESP_OK: delete netif glue successfully
Type Definitions
-
typedef struct esp_eth_netif_glue_t *esp_eth_netif_glue_handle_t
Handle of netif glue - an intermediate layer between netif and Ethernet driver.