电机控制脉宽调制器 (MCPWM)
MCPWM 外设是一个多功能 PWM 生成器,集成多个子模块,在电力电子应用(如电机控制、数字电源等)中至关重要。MCPWM 外设通常适用于以下场景:
数字电机控制,如有刷/无刷直流电机、RC 伺服电机
基于开关模式的数字电源转换
功率数模转换器 (Power DAC),其中占空比等于 DAC 的模拟值
计算外部脉宽,并将其转换为其他模拟值,如速度、距离
为磁场定向控制 (FOC) 生成空间矢量调制 (SVPWM) 信号
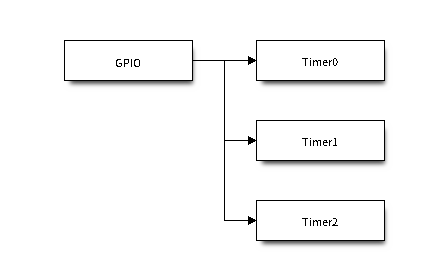
外设的主要子模块如下图所示:

MCPWM 概述
MCPWM 定时器模块:最终输出 PWM 信号的时间基准。它也决定了其他子模块的事件时序。
MCPWM 操作器模块:生成 PWM 波形的关键模块。它由其他子模块组成,如比较器、PWM 生成器、死区生成器和载波调制器。
MCPWM 比较器模块:输入时间基准值,并不断与配置的阈值进行比较。当定时器计数值等于任何一个阈值时,生成一个比较事件,MCPWM 生成器随即相应更新其电平。
MCPWM 生成器模块:根据 MCPWM 定时器、MCPWM 比较器等子模块触发的各种事件,生成一对独立或互补的 PWM 波形。
MCPWM 故障检测模块:通过 GPIO 交换矩阵检测外部的故障情况。检测到故障信号时,MCPWM 操作器将强制所有生成器进入预先定义的状态,从而保护系统。
MCPWM 同步模块:同步 MCPWM 定时器,以确保由不同的 MCPWM 生成器最终生成的 PWM 信号具有固定的相位差。可以通过 GPIO 交换矩阵和 MCPWM 定时器事件生成同步信号。
死区生成器模块:在此前生成的 PWM 边沿上插入额外的延迟。
载波模块:可通过 PWM 波形生成器和死区生成器,将一个高频载波信号调制为 PWM 波形,这是控制功率开关器件的必需功能。
制动控制:MCPWM 操作器支持配置检测到特定故障时生成器的制动控制方式。根据故障的严重程度,可以选择立即关闭或是逐周期调节 PWM 输出。
MCPWM 捕获模块:独立子模块,不依赖于上述 MCPWM 操作器工作。捕获模块包括一个专用的定时器和几个独立的通道,每个通道都与 GPIO 相连。GPIO 上的脉冲触发捕获定时器以存储时间基准值,随后通过中断进行通知。此模块有助于更加精准地测量脉宽。此外,捕获定时器也可以通过 MCPWM 同步子模块进行同步。
功能概述
下文将分节概述 MCPWM 的功能:
资源配置及初始化 - 介绍各类 MCPWM 模块的分配,如定时器、操作器、比较器、生成器等。随后介绍的 IO 设置和控制功能也将围绕这些模块进行。
定时器操作和事件 - 介绍 MCPWM 定时器支持的控制功能和事件回调。
比较器操作和事件 - 介绍 MCPWM 比较器支持的控制功能和事件回调。
生成器对事件执行的操作 - 介绍如何针对 MCPWM 定时器和比较器生成的特定事件,设置 MCPWM 生成器的相应执行操作。
经典 PWM 波形的生成器配置 - 介绍一些经典 PWM 波形的生成器配置。
死区 - 介绍如何设置 MCPWM 生成器的死区时间。
经典 PWM 波形的死区配置 - 介绍一些经典 PWM 波形的死区配置。
载波调制 - 介绍如何在最终输出的 PWM 波形上调制高频载波。
故障检测和制动控制 - 介绍如何为 MCPWM 操作器配置特定故障事件下的制动操作。
生成器强制操作 - 介绍如何强制异步控制生成器的输出水平。
同步模块 - 介绍如何同步 MCPWM 定时器,并确保生成的最终输出 PWM 信号具有固定的相位差。
捕获模块 - 介绍如何使用 MCPWM 捕获模块测量信号脉宽。
电源管理 - 介绍不同的时钟源对功耗的影响。
IRAM 安全 - 介绍如何协调 RMT 中断与禁用缓存。
线程安全 - 列出了由驱动程序认证为线程安全的 API。
Kconfig 选项 - 列出了针对驱动的数个 Kconfig 支持选项。
资源配置及初始化
如上图所示,MCPWM 外设由数个子模块组成。本节将介绍各个子模块的资源配置方式。
MCPWM 定时器
调用 mcpwm_new_timer() 函数,以配置结构体 mcpwm_timer_config_t 为参数,分配一个 MCPWM 定时器为对象。结构体定义为:
mcpwm_timer_config_t::group_id指定 MCPWM 组 ID,范围为 [0,SOC_MCPWM_GROUPS- 1]。需注意,位于不同组的定时器彼此独立。mcpwm_timer_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。mcpwm_timer_config_t::clk_src设置定时器的时钟源。mcpwm_timer_config_t::resolution_hz设置定时器的预期分辨率。内部驱动将根据时钟源和分辨率设置合适的分频器。mcpwm_timer_config_t::count_mode设置定时器的计数模式。mcpwm_timer_config_t::period_ticks设置定时器的周期,以 Tick 为单位(通过mcpwm_timer_config_t::resolution_hz设置 Tick 分辨率)。mcpwm_timer_config_t::update_period_on_empty设置当定时器计数为零时是否更新周期值。mcpwm_timer_config_t::update_period_on_sync设置当定时器接收同步信号时是否更新周期值。
分配成功后,mcpwm_new_timer() 将返回一个指向已分配定时器的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 组中没有空闲定时器时,将返回 ESP_ERR_NOT_FOUND 错误。1
反之,调用 mcpwm_del_timer() 函数将释放已分配的定时器。
MCPWM 操作器
调用 mcpwm_new_operator()() 函数,以配置结构体 mcpwm_operator_config_t 为参数,分配一个 MCPWM 操作器为对象。结构体定义为:
mcpwm_operator_config_t::group_id指定 MCPWM 组 ID,范围为 [0,SOC_MCPWM_GROUPS- 1]。需注意,位于不同组的操作器彼此独立。mcpwm_operator_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。mcpwm_operator_config_t::update_gen_action_on_tez设置是否在定时器计数为零时更新生成器操作。此处及下文提到的定时器指通过mcpwm_operator_connect_timer()连接到操作器的定时器。mcpwm_operator_config_t::update_gen_action_on_tep设置当定时器计数达到峰值时是否更新生成器操作。mcpwm_operator_config_t::update_gen_action_on_sync设置当定时器接收同步信号时是否更新生成器操作。mcpwm_operator_config_t::update_dead_time_on_tez设置当定时器计数为零时是否更新死区时间。mcpwm_operator_config_t::update_dead_time_on_tep设置当定时器计数达到峰值时是否更新死区时间。mcpwm_operator_config_t::update_dead_time_on_sync设置当定时器接收同步信号时是否更新死区时间。
分配成功后,mcpwm_new_operator()() 将返回一个指向已分配操作器的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 组中没有空闲操作器时,将返回 ESP_ERR_NOT_FOUND 错误。1
反之,调用 mcpwm_del_operator()() 函数将释放已分配的操作器。
MCPWM 比较器
调用 mcpwm_new_comparator() 函数,以一个 MCPWM 操作器句柄和配置结构体 mcpwm_comparator_config_t 为参数,分配一个 MCPWM 比较器为对象。操作器句柄由 mcpwm_new_operator()() 生成,结构体定义为:
mcpwm_comparator_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。mcpwm_comparator_config_t::update_cmp_on_tez设置当定时器计数为零时是否更新比较阈值。mcpwm_comparator_config_t::update_cmp_on_tep设置当定时器计数达到峰值时是否更新比较阈值。mcpwm_comparator_config_t::update_cmp_on_sync设置当定时器接收同步信号时是否更新比较阈值。
分配成功后,mcpwm_new_comparator() 将返回一个指向已分配比较器的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 操作器中没有空闲比较器时,将返回 ESP_ERR_NOT_FOUND 错误。1
反之,调用 mcpwm_del_comparator() 函数将释放已分配的比较器。
MCPWM 生成器
调用 mcpwm_new_generator() 函数,以一个 MCPWM 操作器句柄和配置结构体 mcpwm_generator_config_t 为参数,分配一个 MCPWM 生成器为对象。操作器句柄由 mcpwm_new_operator()() 生成,结构体定义为:
mcpwm_generator_config_t::gen_gpio_num设置生成器使用的 GPIO 编号。mcpwm_generator_config_t::invert_pwm设置是否反相 PWM 信号。mcpwm_generator_config_t::pull_up和mcpwm_generator_config_t::pull_down用来设置是否启用内部上下拉电阻。
分配成功后,mcpwm_new_generator() 将返回一个指向已分配生成器的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 操作器中没有空闲生成器时,将返回 ESP_ERR_NOT_FOUND 错误。1
反之,调用 mcpwm_del_generator() 函数将释放已分配的生成器。
MCPWM 故障
MCPWM 故障分为两种类型:来自 GPIO 的故障信号和软件故障。
调用 mcpwm_new_gpio_fault() 函数,以配置结构体 mcpwm_gpio_fault_config_t 为参数,分配一个 GPIO 故障为对象。结构体定义为:
mcpwm_gpio_fault_config_t::group_id设置 MCPWM 组 ID,范围为 [0,SOC_MCPWM_GROUPS- 1]。需注意,位于不同组的 GPIO 故障彼此独立,也就是说,1 组的操作器无法检测到 0 组的 GPIO 故障。mcpwm_gpio_fault_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。mcpwm_gpio_fault_config_t::gpio_num设置故障所使用的 GPIO 编号。mcpwm_gpio_fault_config_t::active_level设置故障信号的有效电平。mcpwm_gpio_fault_config_t::pull_up和mcpwm_gpio_fault_config_t::pull_down设置是否在内部拉高和/或拉低 GPIO。
分配成功后,mcpwm_new_gpio_fault() 将返回一个指向已分配故障的指针。否则,函数将返回错误代码。具体来说,当指定 MCPWM 组中没有空闲 GPIO 故障时,将返回 ESP_ERR_NOT_FOUND 错误。1
调用函数 mcpwm_soft_fault_activate() 使一个软件故障对象触发故障,无需等待来自 GPIO 的真实故障信号。调用 mcpwm_new_soft_fault() 函数,以配置结构体 mcpwm_soft_fault_config_t 为参数,分配一个软件故障为对象。该结构体暂时保留,供后续使用。
分配成功后,mcpwm_new_soft_fault() 将返回一个指向已分配故障的指针。否则,函数将返回错误代码。具体来说,当内存不足以支持该故障对象时,将返回 ESP_ERR_NO_MEM 错误。虽然软件故障和 GPIO 故障是不同类型的故障,但返回的故障句柄为同一类型。
反之,调用 mcpwm_del_fault() 函数将释放已分配的故障。此函数同时适用于软件故障和 GPIO 故障。
MCPWM 同步源
同步源用于同步 MCPWM 定时器和 MCPWM 捕获定时器,分为三种类型:来自 GPIO 的同步源、软件生成的同步源和 MCPWM 定时器事件生成的同步源。
调用 mcpwm_new_gpio_sync_src() 函数,以配置结构体 mcpwm_gpio_sync_src_config_t 为参数,分配一个 GPIO 同步源。结构体定义为:
mcpwm_gpio_sync_src_config_t::group_id指定 MCPWM 组 ID,范围为 [0,SOC_MCPWM_GROUPS- 1]。需注意,位于不同组的 GPIO 同步源彼此独立,也就是说,1 组的定时器无法检测到 0 组的 GPIO 同步源。mcpwm_gpio_sync_src_config_t::gpio_num设置同步源使用的 GPIO 编号。mcpwm_gpio_sync_src_config_t::active_neg设置同步信号在下降沿是否有效。mcpwm_gpio_sync_src_config_t::pull_up和mcpwm_gpio_sync_src_config_t::pull_down设置是否在内部拉高和/或拉低 GPIO。
分配成功后,mcpwm_new_gpio_sync_src() 将返回一个指向已分配同步源的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 组中没有空闲 GPIO 时钟源时,将返回 ESP_ERR_NOT_FOUND 错误。1
调用 mcpwm_new_timer_sync_src() 函数,以配置结构体 mcpwm_timer_sync_src_config_t 为参数,分配一个定时器事件同步源。结构体定义为:
mcpwm_timer_sync_src_config_t::timer_event指定产生同步信号的定时器事件。mcpwm_timer_sync_src_config_t::propagate_input_sync是否广播输入同步信号(即将输入同步信号传输到其同步输出)。
分配成功后,mcpwm_new_timer_sync_src() 将返回一个指向已分配同步源的指针。否则,函数将返回错误代码。具体来说,若是分配的同步源此前已分配给了同一个定时器,将返回 ESP_ERR_INVALID_STATE 错误。
也可以调用 mcpwm_new_soft_sync_src() 函数,以配置结构体 mcpwm_soft_sync_config_t 为参数,分配一个软件同步源。该结构体暂时保留,供后续使用。
分配成功后,mcpwm_new_soft_sync_src() 将返回一个指向已分配同步源的指针。否则,函数将返回错误代码。具体来说,当内存不足以支持分配的同步源时,将返回 ESP_ERR_NO_MEM 错误。需注意,为确保软件同步源能够正常工作,应预先调用 mcpwm_soft_sync_activate()。
相反,调用 mcpwm_del_sync_src() 函数将释放分配的同步源对象。此函数适用于所有类型的同步源。
MCPWM 捕获定时器和通道
MCPWM 组有一个专用定时器,用于捕获特定事件发生时的时间戳。捕获定时器连接了数个独立通道,每个通道都分配了各自的 GPIO。
调用 mcpwm_new_capture_timer() 函数,以配置结构体 mcpwm_capture_timer_config_t 为参数,分配一个捕获定时器。结构体定义为:
mcpwm_capture_timer_config_t::group_id设置 MCPWM 组 ID,范围为 [0,SOC_MCPWM_GROUPS- 1]。mcpwm_capture_timer_config_t::clk_src设置捕获定时器的时钟源。mcpwm_capture_timer_config_t::resolution_hz设置捕获定时器的预期分辨率。内部驱动将根据时钟源和分辨率设置合适的分频器。设置为0时,驱动会自己选取一个适当的分辨率,后续你可以通过mcpwm_capture_timer_get_resolution()查看当前定时器的分辨率。
备注
在 ESP32 中,mcpwm_capture_timer_config_t::resolution_hz 参数无效,捕获定时器的分辨率始终等于 MCPWM_CAPTURE_CLK_SRC_APB。
分配成功后,mcpwm_new_capture_timer() 将返回一个指向已分配捕获定时器的指针。否则,函数将返回错误代码。具体来说,当 MCPWM 组中没有空闲捕获定时器时,将返回 ESP_ERR_NOT_FOUND 错误。1
接下来,可以调用 mcpwm_new_capture_channel() 函数,以一个捕获定时器句柄和配置结构体 mcpwm_capture_channel_config_t 为参数,分配一个捕获通道。结构体定义为:
mcpwm_capture_channel_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。mcpwm_capture_channel_config_t::gpio_num设置捕获通道使用的 GPIO 编号。mcpwm_capture_channel_config_t::prescale设置输入信号的预分频器。mcpwm_capture_channel_config_t::extra_capture_channel_flags::pos_edge和mcpwm_capture_channel_config_t::extra_capture_channel_flags::neg_edge设置是否在输入信号的上升沿和/或下降沿捕获时间戳。mcpwm_capture_channel_config_t::extra_capture_channel_flags::pull_up和mcpwm_capture_channel_config_t::extra_capture_channel_flags::pull_down设置是否在内部拉高和/或拉低 GPIO。mcpwm_capture_channel_config_t::extra_capture_channel_flags::invert_cap_signal设置是否取反捕获信号。
分配成功后,mcpwm_new_capture_channel() 将返回一个指向已分配捕获通道的指针。否则,函数将返回错误代码。具体来说,当捕获定时器中没有空闲捕获通道时,将返回 ESP_ERR_NOT_FOUND 错误。
反之,调用 mcpwm_del_capture_channel() 和 mcpwm_del_capture_timer() 将释放已分配的捕获通道和定时器。
MCPWM 中断优先级
MCPWM 允许为 定时器、操作器、比较器、故障以及捕获事件分别配置中断,中断优先级由各自的 config_t::intr_priority 决定。且同一个 MCPWM 组中的事件共享同一个中断源。注册多个中断事件时,中断优先级需要保持一致。
备注
MCPWM 组注册多个中断事件时,驱动将以第一个事件的中断优先级作为 MCPWM 组的中断优先级。
定时器操作和事件
更新定时器周期
定时器周期在创建定时器时就已经通过 mcpwm_timer_config_t::period_ticks 被初始化过了。你还可以在运行期间,调用 mcpwm_timer_set_period() 函数来更新定时周期。新周期的生效时机由 mcpwm_timer_config_t::update_period_on_empty 和 mcpwm_timer_config_t::update_period_on_sync 共同决定。如果他们两个参数都是 false, 那么新的定时周期会立即生效。
注册定时器事件回调
MCPWM 定时器运行时会生成不同的事件。若有函数需在特定事件发生时调用,则应预先调用 mcpwm_timer_register_event_callbacks(),将所需函数挂载至中断服务程序 (ISR) 中。驱动中定时器回调函数原型声明为 mcpwm_timer_event_cb_t,其所支持的事件回调类型则列在 mcpwm_timer_event_callbacks_t 中:
mcpwm_timer_event_callbacks_t::on_full设置定时器计数达到峰值时的回调函数。mcpwm_timer_event_callbacks_t::on_empty设置定时器计数为零时的回调函数。mcpwm_timer_event_callbacks_t::on_stop设置定时器停止时的回调函数。
由于上述回调函数是在 ISR 中调用的,因此,这些函数 不应 涉及 block 操作。可以检查调用 API 的后缀,确保在函数中只调用了后缀为 ISR 的 FreeRTOS API。
函数 mcpwm_timer_register_event_callbacks() 中的 user_data 参数用于保存用户上下文,将直接传递至各个回调函数。
此函数会在不启用 MCPWM 定时器的情况下延迟安装其中断服务。因此,需在调用 mcpwm_timer_enable() 函数前调用该函数,否则将返回 ESP_ERR_INVALID_STATE 错误。更多信息请参见 启用和禁用定时器。
启用和禁用定时器
在对定时器进行 IO 控制前,需要预先调用 mcpwm_timer_enable() 函数启用定时器。这个函数将:
将定时器的状态从 init 切换到 enable。
若中断服务此前已通过
mcpwm_timer_register_event_callbacks()函数延迟安装,则启用中断服务。若选择了特定时钟源(例如 PLL_160M 时钟),则获取相应的电源管理锁。更多信息请参见 电源管理。
反之,调用 mcpwm_timer_disable() 会将定时器切换回 init 状态、禁用中断服务并释放电源管理锁。
启动和停止定时器
通过基本的 IO 控制,即可启动和停止定时器。使用不同的 mcpwm_timer_start_stop_cmd_t 命令调用 mcpwm_timer_start_stop() 便可立即启动定时器,或在发生特定事件时停止定时器。此外,还可以通过配置,让定时器仅计数一轮。也就是说,在计数达到峰值或零后,定时器自行停止。
连接定时器和操作器
调用 mcpwm_operator_connect_timer() 函数,连接分配的 MCPWM 定时器和 MCPWM 操作器。连接后,操作器即可将定时器作为时基,生成所需的 PWM 波形。需注意,MCPWM 定时器和操作器必须位于同一个组中。否则,将返回 ESP_ERR_INVALID_ARG 错误。
比较器操作和事件
注册比较器事件回调
MCPWM 比较器可以在定时器计数器等于比较值时发送通知。若有函数需在比较事件发生时调用,则应预先调用 mcpwm_comparator_register_event_callbacks(),将所需函数挂载至中断服务程序 (ISR) 中。驱动中比较器回调函数原型声明为 mcpwm_compare_event_cb_t,其所支持的事件回调类型则列在 mcpwm_comparator_event_callbacks_t 中:
mcpwm_comparator_event_callbacks_t::on_reach设置当定时器计数器等于比较值时的比较器回调函数。
回调函数会提供类型为 mcpwm_compare_event_data_t 的事件特定数据。由于上述回调函数是在 ISR 中调用的,因此,这些函数 不应 涉及 block 操作。可以检查调用 API 的后缀,确保在函数中只调用了后缀为 ISR 的 FreeRTOS API。
函数 mcpwm_comparator_register_event_callbacks() 中的 user_data 参数用于保存用户上下文,将直接传递至各个回调函数。
此函数会延迟安装 MCPWM 比较器的中断服务。中断服务只能通过 mcpwm_del_comparator 移除。
设置比较值
运行 MCPWM 比较器时,可以调用 mcpwm_comparator_set_compare_value() 设置比较值。需注意以下几点:
重新设置的比较值可能不会立即生效。比较值的更新时间通过
mcpwm_comparator_config_t::update_cmp_on_tez或mcpwm_comparator_config_t::update_cmp_on_tep或mcpwm_comparator_config_t::update_cmp_on_sync配置。请确保已经预先调用
mcpwm_operator_connect_timer()将操作器连接至 MCPWM 定时器。否则,将返回ESP_ERR_INVALID_STATE错误。比较值不应超过定时器的计数峰值。否则,将无法触发比较事件。
生成器对事件执行的操作
设置生成器对定时器事件执行的操作
调用 mcpwm_generator_set_actions_on_timer_event() 并辅以若干操作配置,可以针对不同的定时器事件,为生成器设置不同的操作。操作配置定义在 mcpwm_gen_timer_event_action_t 中:
mcpwm_gen_timer_event_action_t::direction指定定时器计数方向,可以调用mcpwm_timer_direction_t查看支持的方向。mcpwm_gen_timer_event_action_t::event指定定时器事件,可以调用mcpwm_timer_event_t查看支持的定时器事件。mcpwm_gen_timer_event_action_t::action指定随即进行的生成器操作,可以调用mcpwm_generator_action_t查看支持的操作。
可借助辅助宏 MCPWM_GEN_TIMER_EVENT_ACTION 构建定时器事件操作条目。
需注意,mcpwm_generator_set_actions_on_timer_event() 的参数列表 必须 以 MCPWM_GEN_TIMER_EVENT_ACTION_END 结束。
也可以调用 mcpwm_generator_set_action_on_timer_event() 逐一设置定时器操作,无需涉及变量参数。
设置生成器对比较器事件执行的操作
调用 mcpwm_generator_set_actions_on_compare_event() 并辅以若干操作配置,可以针对不同的比较器事件,为生成器设置不同的操作。操作配置定义在 mcpwm_gen_compare_event_action_t 中:
mcpwm_gen_compare_event_action_t::direction指定定时器计数方向,可以调用mcpwm_timer_direction_t查看支持的方向。mcpwm_gen_compare_event_action_t::comparator指定比较器句柄。有关分配比较器的方法,请参见 MCPWM 比较器。mcpwm_gen_compare_event_action_t::action指定随即进行的生成器操作,可以调用mcpwm_generator_action_t查看支持的操作。
可借助辅助宏 MCPWM_GEN_COMPARE_EVENT_ACTION 构建比较事件操作条目。
需注意,mcpwm_generator_set_actions_on_compare_event() 的参数列表 必须 以 MCPWM_GEN_COMPARE_EVENT_ACTION_END 结束。
也可以调用 mcpwm_generator_set_action_on_compare_event() 逐一设置比较器操作,无需涉及变量参数。
设置生成器对故障事件执行的操作
调用 mcpwm_generator_set_action_on_fault_event() 并辅以操作配置,可以针对故障事件,为生成器设置操作。操作配置定义在 mcpwm_gen_fault_event_action_t 中:
mcpwm_gen_fault_event_action_t::direction指定定时器计数方向,可以调用mcpwm_timer_direction_t查看支持的方向。mcpwm_gen_fault_event_action_t::fault指定用于触发器的故障。有关分配故障的方法,请参见 MCPWM 故障。mcpwm_gen_fault_event_action_t::action指定随即进行的生成器操作,可以调用mcpwm_generator_action_t查看支持的操作。
当生成器所属的操作器中没有空闲触发器时,将返回 ESP_ERR_NOT_FOUND 错误。1
触发器支持的故障仅为 GPIO 故障,当传入故障不为 GPIO 故障时,将返回 ESP_ERR_NOT_SUPPORTED 错误。
可借助辅助宏 MCPWM_GEN_FAULT_EVENT_ACTION 构建触发事件操作条目。
需注意,故障事件没有类似 mcpwm_generator_set_actions_on_fault_event() 这样的可变参数函数。
设置生成器对同步事件执行的操作
调用 mcpwm_generator_set_action_on_sync_event() 并辅以操作配置,可以针对同步事件,为生成器设置操作。操作配置定义在 mcpwm_gen_sync_event_action_t 中:
mcpwm_gen_sync_event_action_t::direction指定定时器计数方向,可以调用mcpwm_timer_direction_t查看支持的方向。mcpwm_gen_sync_event_action_t::sync指定用于触发器的同步源。有关分配同步源的方法,请参见 MCPWM 同步源。mcpwm_gen_sync_event_action_t::action指定随即进行的生成器操作,可以调用mcpwm_generator_action_t查看支持的操作。
当生成器所属的操作器中没有空闲触发器时,将返回 ESP_ERR_NOT_FOUND 错误。1
无论同步为何种类型,触发器仅支持一种同步操作,如果多次设置同步操作,将返回 ESP_ERR_INVALID_STATE 错误。
可借助辅助宏 MCPWM_GEN_SYNC_EVENT_ACTION 构建触发事件操作条目。
需注意,同步事件没有类似 mcpwm_generator_set_actions_on_sync_event() 这样的可变参数函数。
经典 PWM 波形的生成器配置
本节提供了一些生成器支持生成的经典 PWM 波形,同时提供用于生成这些波形的代码片段。总的来说:
生成波形为 对称波形 还是 不对称波形 取决于 MCPWM 定时器的计数模式。
波形对的 激活电平 取决于占空比较小的 PWM 波形的电平。
PWM 波形的周期取决于定时器的周期和计数模式。
PWM 波形的占空比取决于生成器的各种操作配置组合。
单边不对称波形 - 高电平
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
单边不对称波形 - 低电平
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_HIGH)));
}
脉冲位置不对称波形
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_TOGGLE),
MCPWM_GEN_TIMER_EVENT_ACTION_END()));
}
双沿不对称波形 - 低电平有效
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_TIMER_EVENT_ACTION_END()));
}
双沿对称波形 - 低电平有效
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpa, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
}
双沿对称波形 - 互补
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpa, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
ESP_ERROR_CHECK(mcpwm_generator_set_actions_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW),
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_HIGH),
MCPWM_GEN_COMPARE_EVENT_ACTION_END()));
}
死区
在电力电子学中,常常会用到整流器和逆变器,这就涉及到了整流桥和逆变桥的应用。每个桥臂配有两个功率电子器件,例如 MOSFET、IGBT 等。同一桥臂上的两个 MOSFET 不能同时导通,否则会造成短路。实际应用中,在 PWM 波形显示 MOSFET 开关已关闭后,仍需要一段时间窗口才能完全关闭 MOSFET。因此,需要设置 生成器对事件执行的操作,在已生成的 PWM 波形上添加额外延迟。
死区驱动器的工作方式与 装饰器 类似。在 mcpwm_generator_set_dead_time() 函数的参数中,驱动接收主要生成器句柄 (in_generator),并在应用死区后返回一个新的生成器 (out_generator)。需注意,如果 out_generator 和 in_generator 相同,这表示 PWM 波形中的时间延迟是以“就地”的方式添加的。反之,如果 out_generator 和 in_generator 不同,则代表在原 in_generator 的基础上派生出了一个新的 PWM 波形。
结构体 mcpwm_dead_time_config_t 中列出了死区相关的具体配置:
mcpwm_dead_time_config_t::posedge_delay_ticks和mcpwm_dead_time_config_t::negedge_delay_ticks设置 PWM 波形上升沿和下降沿上的延迟时间,以 Tick 为单位。若将这两个参数设置为 0,则代表绕过死区模块。死区的 Tick 分辨率与通过mcpwm_operator_connect_timer()连接操作器的定时器相同。mcpwm_dead_time_config_t::invert_output设置是否在应用死区后取反信号,以控制延迟边沿的极性。
警告
由于硬件限制,同一种 delay 模块(posedge delay 或者 negedge delay)不能同时被应用在不同的 MCPWM 生成器中。例如,以下配置是无效的:
mcpwm_dead_time_config_t dt_config = {
.posedge_delay_ticks = 10,
};
// 给 generator A 叠加上升沿 delay
mcpwm_generator_set_dead_time(mcpwm_gen_a, mcpwm_gen_a, &dt_config);
// NOTE: 下面的操作是无效的,不能将同一种 delay 应用于不同的 generator 上
mcpwm_generator_set_dead_time(mcpwm_gen_b, mcpwm_gen_b, &dt_config);
然而,你可以为生成器 A 设置 posedge delay,为生成器 B 设置 negedge delay。另外,也可以为生成器 B 同时设置 posedge delay 和 negedge delay,而让生成器 A 绕过死区模块。注意,如果对生成器 A 同时设置 negedge delay 和 posedge delay,生成器 B 将无法正常工作。其中,生成器 A 为通过操作器句柄申请的第一个生成器,生成器 B 为通过操作器句柄申请的第二个生成器。
备注
也可以通过设置 生成器对事件执行的操作 来生成所需的死区,通过不同的比较器来控制边沿位置。但是,如果需要使用经典的基于边沿延迟并附带极性控制的死区,则应使用死区子模块。
经典 PWM 波形的死区配置
本节提供了一些死区子模块支持生成的经典 PWM 波形,同时在图片下方提供用于生成这些波形的代码片段。
高电平有效互补
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
dead_time_config.flags.invert_output = true;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
低电平有效互补
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
.flags.invert_output = true
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
dead_time_config.flags.invert_output = false;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
高电平有效
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
低电平有效
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
.flags.invert_output = true
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
PWMA 上升沿延迟,绕过 PWMB 死区
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
};
// apply deadtime to generator_a
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// bypass deadtime module for generator_b
dead_time_config.posedge_delay_ticks = 0;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
PWMB 下降沿延迟,绕过 PWMA 死区
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 0,
.negedge_delay_ticks = 0,
};
// generator_a bypass the deadtime module (no delay)
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// apply dead time to generator_b
dead_time_config.negedge_delay_ticks = 50;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
PWMB 上升下降沿延迟,绕过 PWMA 死区
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 0,
.negedge_delay_ticks = 0,
};
// generator_a bypass the deadtime module (no delay)
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// apply dead time on both edge for generator_b
dead_time_config.negedge_delay_ticks = 50;
dead_time_config.posedge_delay_ticks = 50;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
载波调制
MCPWM 操作器具有载波子模块,可以根据需要(例如隔离式数字电源应用中)使用变压器传递 PWM 输出信号,实现电机驱动器的电气隔离。在电机需要在全负荷下稳定运行时,各个 PWM 输出信号都将占空比稳定保持在 100% 左右。由于变压器无法直接耦合非交替信号,需要使用载波子模块调制信号,生成交流电波形,从而实现耦合。
调用 mcpwm_operator_apply_carrier(),并提供配置结构体 mcpwm_carrier_config_t,配置载波子模块:
mcpwm_carrier_config_t::clk_src设置载波的时钟源。mcpwm_carrier_config_t::frequency_hz表示载波频率,单位为赫兹。内部驱动将根据时钟源和载波频率设置合适的分频器。mcpwm_carrier_config_t::duty_cycle表示载波的占空比。需注意,支持的占空比选项并不连续,驱动程序将根据配置查找最接近的占空比。mcpwm_carrier_config_t::first_pulse_duration_us表示第一个脉冲的脉宽,单位为微秒。该脉冲的分辨率由mcpwm_carrier_config_t::frequency_hz中的配置决定。第一个脉冲的脉宽不能为零,且至少为一个载波周期。脉宽越长,电感传导越快。mcpwm_carrier_config_t::invert_before_modulate和mcpwm_carrier_config_t::invert_after_modulate设置是否在调制前和调制后取反载波输出。
具体而言,可调用 mcpwm_operator_apply_carrier() 并将其配置为 NULL,禁用载波子模块。
故障检测和制动控制
MCPWM 操作器能够感知外部信号,接收有关电机故障、功率驱动器及其他连接设备的信息。这些故障信号封装在 MCPWM 故障对象中。
电机需配置故障模式以及检测到特定故障时的对应操作,例如拉低有刷电机的所有输出,或是锁定步进电机的电流状态等。此操作应使电机重回安全状态,降低故障导致损坏的可能性。
设置故障时操作器的制动模式
MCPWM 操作器对故障的响应方式为 制动。可以调用 mcpwm_operator_set_brake_on_fault(),为每个故障对象配置不同的制动模式。制动的相关配置包含在结构体 mcpwm_brake_config_t 中:
mcpwm_brake_config_t::fault设置操作器响应的故障类型。mcpwm_brake_config_t::brake_mode设置对应故障的制动模式,可以调用mcpwm_operator_brake_mode_t查看支持的制动模式。在MCPWM_OPER_BRAKE_MODE_CBC模式下,操作器将在故障消失后自行恢复正常,可以通过mcpwm_brake_config_t::cbc_recover_on_tez和mcpwm_brake_config_t::cbc_recover_on_tep配置恢复时间。在MCPWM_OPER_BRAKE_MODE_OST模式下,即使故障消失,操作器也无法恢复正常。此时,需要调用mcpwm_operator_recover_from_fault(),手动恢复操作器。
设置发生制动事件时的生成器操作
调用 mcpwm_generator_set_actions_on_brake_event() 并辅以若干操作配置,可以针对不同的制动事件,为生成器设置不同的对应操作。操作配置定义在 mcpwm_gen_brake_event_action_t 中:
mcpwm_gen_brake_event_action_t::direction指定定时器的方向,可以调用mcpwm_timer_direction_t查看支持的方向。mcpwm_gen_brake_event_action_t::brake_mode指定制动模式,可以调用mcpwm_operator_brake_mode_t查看支持的制动模式。mcpwm_gen_brake_event_action_t::action指定生成器操作,可以调用mcpwm_generator_action_t查看支持的操作。
可借助辅助宏 MCPWM_GEN_BRAKE_EVENT_ACTION 构建制动事件操作条目。
需注意, mcpwm_generator_set_actions_on_brake_event() 的参数列表 必须 以 MCPWM_GEN_BRAKE_EVENT_ACTION_END 结束。
也可以调用 mcpwm_generator_set_action_on_brake_event() 逐一设置制动操作,无需涉及变量参数。
注册故障事件回调
MCPWM 故障检测器支持在检测到实际故障或故障信号消失时发送通知。若有函数需在特定事件发生时调用,则应预先调用 mcpwm_fault_register_event_callbacks(),将所需函数挂载至中断服务程序 (ISR) 中。驱动中故障事件回调函数原型声明为 mcpwm_fault_event_cb_t,其所支持的事件回调类型则列在 mcpwm_fault_event_callbacks_t 中:
mcpwm_fault_event_callbacks_t::on_fault_enter设置检测到故障时调用的回调函数。mcpwm_fault_event_callbacks_t::on_fault_exit设置故障消失后调用的回调函数。
由于上述回调函数在 ISR 中调用,因此,这些函数 不应 涉及 block 操作。可以检查调用 API 的后缀,确保在函数中只调用了后缀为 ISR 的 FreeRTOS API。
函数 mcpwm_fault_register_event_callbacks() 中的 user_data 参数用于保存用户上下文,将直接传递至各个回调函数。
此函数会延迟安装 MCPWM 故障的中断服务。中断服务只能通过 mcpwm_del_fault 移除。
寄存器制动事件回调
MCPWM 操作器支持在进行制动操作前发送通知。若有函数需在特定事件发生时调用,则应预先调用 mcpwm_operator_register_event_callbacks(),将所需函数挂载至中断服务程序 (ISR) 中。驱动中制动事件回调函数原型声明为 mcpwm_brake_event_cb_t,其所支持的事件回调类型则列在 mcpwm_operator_event_callbacks_t 中:
mcpwm_operator_event_callbacks_t::on_brake_cbc设置操作器进行 逐周期 (CBC) 操作前调用的回调函数。mcpwm_operator_event_callbacks_t::on_brake_ost设置操作器进行 一次性 (OST) 操作前调用的回调函数。
由于上述回调函数在 ISR 中调用,因此,这些函数 不应 涉及 block 操作。可以检查调用 API 的后缀,确保在函数中只调用了后缀为 ISR 的 FreeRTOS API。
函数 mcpwm_operator_register_event_callbacks() 中的 user_data 参数用于保存用户上下文,将直接传递至各个回调函数。
此函数会延迟安装 MCPWM 故障的中断服务。中断服务只能通过 mcpwm_del_operator 移除。
生成器强制操作
调用 mcpwm_generator_set_force_level(),使能软件强制决定运行时的生成器输出电平。相较于通过 mcpwm_generator_set_actions_on_timer_event() 配置的其他事件操作,软件强制事件优先级最高。
设置
level为 -1,代表禁用强制操作,生成器的输出电平重新交由事件操作控制。设置
hold_on为 true,代表强制输出电平将保持不变,直到设置level为 -1 来移除该电平。设置
hole_on为 false,代表强制输出电平仅在短时间有效,随后发生的任何事件都可以改变该电平。
同步模块
MCPWM 定时器接收到同步信号后,定时器将强制进入一个预定义的 相位,该相位由计数值和计数方向共同决定。调用 mcpwm_timer_set_phase_on_sync(),设置同步相位。同步相位配置定义在 mcpwm_timer_sync_phase_config_t 结构体中:
mcpwm_timer_sync_phase_config_t::sync_src设置同步信号源。创建同步源对象的相关操作,请参见 MCPWM 同步源。具体来说,当此参数设置为NULL时,驱动器将禁用 MCPWM 定时器的同步功能。mcpwm_timer_sync_phase_config_t::count_value设置接收同步信号后加载至计数器的值。mcpwm_timer_sync_phase_config_t::direction设置接收同步信号后的计数方向。
备注
当 MCPWM 定时器在 MCPWM_TIMER_COUNT_MODE_UP_DOWN 模式下工作时,需要特别注意。在该模式下,计数器范围 [0 -> peak-1] 属于 递增 阶段, [peak -> 1] 属于 递减 阶段。因此,如果你将 mcpwm_timer_sync_phase_config_t::count_value 设置为零,则可能还需要将 mcpwm_timer_sync_phase_config_t::direction 设置为 MCPWM_TIMER_DIRECTION_UP。否则,计时器将继续维持递减阶段,计数值会下溢至峰值。
同理, MCPWM 捕获定时器和通道 也支持同步。调用 mcpwm_capture_timer_set_phase_on_sync(),设置捕获定时器的同步相位。同步相位配置定义在 mcpwm_capture_timer_sync_phase_config_t 结构体中:
mcpwm_capture_timer_sync_phase_config_t::sync_src设置同步信号源。关于如何创建一个同步源对象,请参见 MCPWM 同步源。具体来说,当此参数设置为NULL时,驱动器将禁用 MCPWM 捕获定时器的同步功能。mcpwm_capture_timer_sync_phase_config_t::count_value设置接收同步信号后加载至计数器的值。mcpwm_capture_timer_sync_phase_config_t::direction设置接收同步信号后的计数方向。需注意,不同于 MCPWM 定时器,捕获定时器只支持MCPWM_TIMER_DIRECTION_UP这一个计数方向。
使用 GPIO 同步定时器
GPIO Sync All MCPWM Timers
static void example_setup_sync_strategy(mcpwm_timer_handle_t timers[])
{
mcpwm_sync_handle_t gpio_sync_source = NULL;
mcpwm_gpio_sync_src_config_t gpio_sync_config = {
.group_id = 0, // GPIO 故障应与以上定时器位于同一组中
.gpio_num = EXAMPLE_SYNC_GPIO,
.flags.pull_down = true,
.flags.active_neg = false, // 默认情况下,一个上升沿脉冲可以触发一个同步事件
};
ESP_ERROR_CHECK(mcpwm_new_gpio_sync_src(&gpio_sync_config, &gpio_sync_source));
mcpwm_timer_sync_phase_config_t sync_phase_config = {
.count_value = 0, // 同步相位:目标计数值
.direction = MCPWM_TIMER_DIRECTION_UP, // 同步相位:计数方向
.sync_src = gpio_sync_source, // 同步源
};
for (int i = 0; i < 3; i++) {
ESP_ERROR_CHECK(mcpwm_timer_set_phase_on_sync(timers[i], &sync_phase_config));
}
}
捕获模块
MCPWM 捕获的主要功能是记录捕获信号的脉冲边沿的有效时间。可以通过捕获得到脉宽,随后使用捕获回调函数将脉宽转换为其他物理量,如距离或速度。例如,在下图的无刷直流电机 (BLDC) 方案中,可以使用捕获子模块来确认来自霍尔传感器的转子位置。
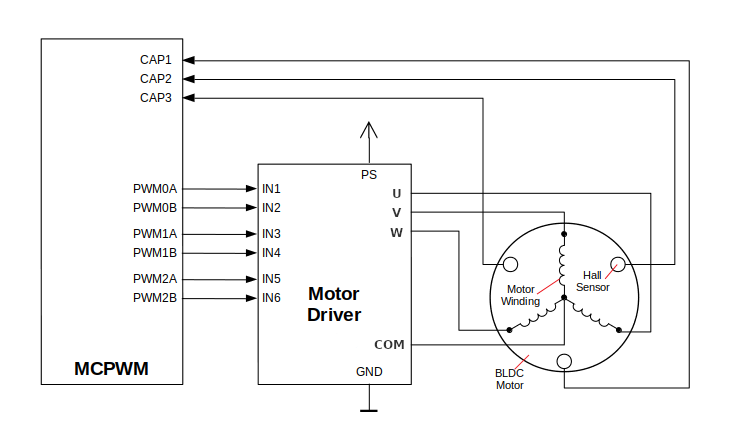
带霍尔传感器的 MCPWM 无刷直流电机
通常,捕获定时器连接了数个捕获通道。有关资源分配的相关信息,请参见 MCPWM 捕获定时器和通道。
注册捕获事件回调
MCPWM 捕获通道支持在信号上检测到有效边沿时发送通知。须调用 mcpwm_capture_channel_register_event_callbacks(),注册一个回调函数来获得捕获的定时器计数值。回调函数原型声明在 mcpwm_capture_event_cb_t 中,可以调用 mcpwm_capture_event_callbacks_t 查看支持的捕获回调:
mcpwm_capture_event_callbacks_t::on_cap设置检测到有效边沿时捕获通道的回调函数。
回调函数会针对特定事件,提供 mcpwm_capture_event_data_t 类型的数据,由此,可以通过 mcpwm_capture_event_data_t::cap_edge 和 mcpwm_capture_event_data_t::cap_value 分别得到捕获信号的边沿及该捕获的计数值。随后,调用 mcpwm_capture_timer_get_resolution(),获取捕获定时器的分辨率,以将捕获计数转换为时间戳。
由于上述回调函数在 ISR 中调用,因此,这些函数 不应 涉及 block 操作。可以检查调用 API 的后缀,确保在函数中只调用了后缀为 ISR 的 FreeRTOS API。
函数 mcpwm_capture_channel_register_event_callbacks() 中的 user_data 参数用于保存用户上下文,将直接传递至各个回调函数。
此函数会延迟安装 MCPWM 捕获的中断服务。中断服务只能通过 mcpwm_del_capture_channel 移除。
启用或禁用捕获通道
调用 mcpwm_new_capture_channel() 进行分配后,捕获通道不会自动启用。应调用 mcpwm_capture_channel_enable() 或 mcpwm_capture_channel_disable() 来启用或禁用该通道。如果在为通道注册事件回调时,由于调用了 mcpwm_capture_channel_register_event_callbacks(),致使延迟安装中断服务,则调用 mcpwm_capture_channel_enable() 启用通道时,也将启用中断服务。
启用或禁用捕获定时器
在对捕获定时器进行 IO 控制之前,需要首先调用 mcpwm_capture_timer_enable(),启用定时器。此函数将进行如下内部操作:
将捕获定时器的状态从 init 切换到 enable。
如果选择了一个特定时钟源(例如 APB 时钟),则获取一个对应的电源管理锁。更多信息请参见 电源管理。
反之,调用 mcpwm_capture_timer_disable() 将使定时器驱动程序切换回 init 状态,并释放电源管理锁。
启动或停止捕获定时器
通过基本的 IO 控制,即可启动或停止捕获定时器。调用 mcpwm_capture_timer_start() 启动捕获定时器,或调用 mcpwm_capture_timer_stop() 立即停止捕获定时器。
触发软件捕获事件
某些场景下,可能存在需要软件触发“虚假”捕获事件的需求。此时,可以调用 mcpwm_capture_channel_trigger_soft_catch() 实现。需注意,此类“虚假”捕获事件仍然会触发中断,并从而调用捕获事件回调函数。
电源管理
启用电源管理(即开启 CONFIG_PM_ENABLE)时,系统会在进入 Light-sleep 前调整 PLL 和 APB 频率。该操作有可能会改变 MCPWM 定时器的计数步长,导致计时偏差。
不过,驱动程序可以获取 ESP_PM_NO_LIGHT_SLEEP 类型的电源管理锁,防止系统进入 Light-sleep。每当驱动创建以 PLL 作为时钟源的 MCPWM 定时器实例时,都会在通过 mcpwm_timer_enable() 启用定时器时获取电源管理锁。反之,调用 mcpwm_timer_disable() 时,驱动程序释放锁。
同理,每当驱动创建 MCPWM 捕获定时器实例时,都会在通过 mcpwm_capture_timer_enable() 启用定时器时获取电源管理锁,并在调用 mcpwm_capture_timer_disable() 时释放锁。
IRAM 安全
默认情况下,禁用 cache 时,写入/擦除 flash 等原因将导致 MCPWM 中断延迟,事件回调函数也将延迟执行。在实时应用程序中,应避免此类情况。
因此,可以启用 Kconfig 选项 CONFIG_MCPWM_ISR_IRAM_SAFE,该选项:
支持在禁用 cache 时启用所需中断
支持将 ISR 使用的所有函数存放在 IRAM 中 2
支持将驱动程序存放在 DRAM 中(以防其意外映射到 PSRAM 中)
启用该选项可以保证 cache 禁用时的中断运行,但会相应增加 IRAM 占用。
另一个 Kconfig 选项 CONFIG_MCPWM_CTRL_FUNC_IN_IRAM 也支持将常用的 IO 控制函数存放在 IRAM 中,以保证在禁用 cache 时可以正常使用函数。IO 控制函数如下所示:
线程安全
驱动程序会确保工厂函数(如 mcpwm_new_timer())的线程安全,使用时,可以直接从不同的 RTOS 任务中调用此类函数,无需额外锁保护。
驱动程序设置了临界区,以防函数同时在任务和 ISR 中调用。因此,以下函数支持在 ISR 上下文运行:
资源配置及初始化 中尚未提及的函数并非线程安全。在没有设置互斥锁保护的任务中,应避免调用这些函数。
Kconfig 选项
CONFIG_MCPWM_ISR_IRAM_SAFE 控制默认 ISR 处理程序能否在禁用 cache 的情况下工作。更多信息请参见 IRAM 安全。
CONFIG_MCPWM_CTRL_FUNC_IN_IRAM 控制 MCPWM 控制函数的存放位置(IRAM 或 flash)。更多信息请参见 IRAM 安全。
CONFIG_MCPWM_ENABLE_DEBUG_LOG 用于启用调试日志输出。启用此选项将增加固件的二进制文件大小。
应用示例
peripherals/mcpwm/mcpwm_bdc_speed_control 演示了如何使用两个特定 PWM 信号驱动有刷直流电机,通过光电编码器测量电机速度,并通过 PID 算法保持稳定的电机速度。
peripherals/mcpwm/mcpwm_bldc_hall_control 演示了如何使用 MCPWM 外设,通过六步换向方案控制无刷直流电机,根据霍尔传感器的读数调整电机的旋转方向和速度。
peripherals/mcpwm/mcpwm_capture_hc_sr04 演示了如何使用 MCPWM 外设的捕获模块,解码超声波传感器 (HC-SR04) 的脉冲宽度信号。HC-SR04 传感器可根据脉冲的宽度测量距离。
peripherals/mcpwm/mcpwm_foc_svpwm_open_loop 演示了如何使用 MCPWM 外设生成三对 PWM 信号,用于磁场定向控制 (FOC),从而驱动无刷直流电机或永磁同步电机,或驱动三相功率逆变器(使用开环 FOC 算法)。
peripherals/mcpwm/mcpwm_servo_control 演示了如何使用 MCPWM 驱动程序发送 PWM 信号来控制 RC 伺服电机,它可以在 -60° 到 60° 间来回旋转。
peripherals/mcpwm/mcpwm_sync 演示了如何使用 MCPWM 定时器生成三个 PWM 同步信号,可以通过 GPIO、Timer TEZ 或软件来同步定时器。
API 参考
Header File
This header file can be included with:
#include "driver/mcpwm_timer.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_timer(const mcpwm_timer_config_t *config, mcpwm_timer_handle_t *ret_timer)
Create MCPWM timer.
- 参数
config -- [in] MCPWM timer configuration
ret_timer -- [out] Returned MCPWM timer handle
- 返回
ESP_OK: Create MCPWM timer successfully
ESP_ERR_INVALID_ARG: Create MCPWM timer failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM timer failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM timer failed because all hardware timers are used up and no more free one
ESP_FAIL: Create MCPWM timer failed because of other error
-
esp_err_t mcpwm_del_timer(mcpwm_timer_handle_t timer)
Delete MCPWM timer.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- 返回
ESP_OK: Delete MCPWM timer successfully
ESP_ERR_INVALID_ARG: Delete MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Delete MCPWM timer failed because timer is not in init state
ESP_FAIL: Delete MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_set_period(mcpwm_timer_handle_t timer, uint32_t period_ticks)
Set a new period for MCPWM timer.
备注
If
mcpwm_timer_config_t::update_period_on_emptyandmcpwm_timer_config_t::update_period_on_syncare not set, the new period will take effect immediately. Otherwise, the new period will take effect when timer counts to zero or on sync event.备注
You may need to use
mcpwm_comparator_set_compare_valueto set a new compare value for MCPWM comparator in order to keep the same PWM duty cycle.- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timerperiod_ticks -- [in] New period in count ticks
- 返回
ESP_OK: Set new period for MCPWM timer successfully
ESP_ERR_INVALID_ARG: Set new period for MCPWM timer failed because of invalid argument
ESP_FAIL: Set new period for MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_enable(mcpwm_timer_handle_t timer)
Enable MCPWM timer.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- 返回
ESP_OK: Enable MCPWM timer successfully
ESP_ERR_INVALID_ARG: Enable MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM timer failed because timer is enabled already
ESP_FAIL: Enable MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_disable(mcpwm_timer_handle_t timer)
Disable MCPWM timer.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- 返回
ESP_OK: Disable MCPWM timer successfully
ESP_ERR_INVALID_ARG: Disable MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM timer failed because timer is disabled already
ESP_FAIL: Disable MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_start_stop(mcpwm_timer_handle_t timer, mcpwm_timer_start_stop_cmd_t command)
Send specific start/stop commands to MCPWM timer.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()command -- [in] Supported command list for MCPWM timer
- 返回
ESP_OK: Start or stop MCPWM timer successfully
ESP_ERR_INVALID_ARG: Start or stop MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Start or stop MCPWM timer failed because timer is not enabled
ESP_FAIL: Start or stop MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_register_event_callbacks(mcpwm_timer_handle_t timer, const mcpwm_timer_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM timer.
备注
The first call to this function needs to be before the call to
mcpwm_timer_enable备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE: Set event callbacks failed because timer is not in init state
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_timer_set_phase_on_sync(mcpwm_timer_handle_t timer, const mcpwm_timer_sync_phase_config_t *config)
Set sync phase for MCPWM timer.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()config -- [in] MCPWM timer sync phase configuration
- 返回
ESP_OK: Set sync phase for MCPWM timer successfully
ESP_ERR_INVALID_ARG: Set sync phase for MCPWM timer failed because of invalid argument
ESP_FAIL: Set sync phase for MCPWM timer failed because of other error
Structures
-
struct mcpwm_timer_event_callbacks_t
Group of supported MCPWM timer event callbacks.
备注
The callbacks are all running under ISR environment
Public Members
-
mcpwm_timer_event_cb_t on_full
callback function when MCPWM timer counts to peak value
-
mcpwm_timer_event_cb_t on_empty
callback function when MCPWM timer counts to zero
-
mcpwm_timer_event_cb_t on_stop
callback function when MCPWM timer stops
-
mcpwm_timer_event_cb_t on_full
-
struct mcpwm_timer_config_t
MCPWM timer configuration.
Public Members
-
int group_id
Specify from which group to allocate the MCPWM timer
-
mcpwm_timer_clock_source_t clk_src
MCPWM timer clock source
-
uint32_t resolution_hz
Counter resolution in Hz The step size of each count tick equals to (1 / resolution_hz) seconds
-
mcpwm_timer_count_mode_t count_mode
Count mode
-
uint32_t period_ticks
Number of count ticks within a period
-
int intr_priority
MCPWM timer interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
uint32_t update_period_on_empty
Whether to update period when timer counts to zero
-
uint32_t update_period_on_sync
Whether to update period on sync event
-
struct mcpwm_timer_config_t::[anonymous] flags
Extra configuration flags for timer
-
int group_id
-
struct mcpwm_timer_sync_phase_config_t
MCPWM Timer sync phase configuration.
Public Members
-
mcpwm_sync_handle_t sync_src
The sync event source. Set to NULL will disable the timer being synced by others
-
uint32_t count_value
The count value that should lock to upon sync event
-
mcpwm_timer_direction_t direction
The count direction that should lock to upon sync event
-
mcpwm_sync_handle_t sync_src
Header File
This header file can be included with:
#include "driver/mcpwm_oper.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_operator(const mcpwm_operator_config_t *config, mcpwm_oper_handle_t *ret_oper)
Create MCPWM operator.
- 参数
config -- [in] MCPWM operator configuration
ret_oper -- [out] Returned MCPWM operator handle
- 返回
ESP_OK: Create MCPWM operator successfully
ESP_ERR_INVALID_ARG: Create MCPWM operator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM operator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM operator failed because can't find free resource
ESP_FAIL: Create MCPWM operator failed because of other error
-
esp_err_t mcpwm_del_operator(mcpwm_oper_handle_t oper)
Delete MCPWM operator.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()- 返回
ESP_OK: Delete MCPWM operator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM operator failed because of invalid argument
ESP_FAIL: Delete MCPWM operator failed because of other error
-
esp_err_t mcpwm_operator_connect_timer(mcpwm_oper_handle_t oper, mcpwm_timer_handle_t timer)
Connect MCPWM operator and timer, so that the operator can be driven by the timer.
- 参数
oper -- [in] MCPWM operator handle, allocated by
mcpwm_new_operator()timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()
- 返回
ESP_OK: Connect MCPWM operator and timer successfully
ESP_ERR_INVALID_ARG: Connect MCPWM operator and timer failed because of invalid argument
ESP_FAIL: Connect MCPWM operator and timer failed because of other error
-
esp_err_t mcpwm_operator_set_brake_on_fault(mcpwm_oper_handle_t oper, const mcpwm_brake_config_t *config)
Set brake method for MCPWM operator.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM brake configuration
- 返回
ESP_OK: Set trip for operator successfully
ESP_ERR_INVALID_ARG: Set trip for operator failed because of invalid argument
ESP_FAIL: Set trip for operator failed because of other error
-
esp_err_t mcpwm_operator_recover_from_fault(mcpwm_oper_handle_t oper, mcpwm_fault_handle_t fault)
Try to make the operator recover from fault.
备注
To recover from fault or escape from trip, you make sure the fault signal has disappeared already. Otherwise the recovery can't succeed.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()fault -- [in] MCPWM fault handle
- 返回
ESP_OK: Recover from fault successfully
ESP_ERR_INVALID_ARG: Recover from fault failed because of invalid argument
ESP_ERR_INVALID_STATE: Recover from fault failed because the fault source is still active
ESP_FAIL: Recover from fault failed because of other error
-
esp_err_t mcpwm_operator_register_event_callbacks(mcpwm_oper_handle_t oper, const mcpwm_operator_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM operator.
备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数
oper -- [in] MCPWM operator handle, allocated by
mcpwm_new_operator()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_operator_apply_carrier(mcpwm_oper_handle_t oper, const mcpwm_carrier_config_t *config)
Apply carrier feature for MCPWM operator.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM carrier specific configuration
- 返回
ESP_OK: Set carrier for operator successfully
ESP_ERR_INVALID_ARG: Set carrier for operator failed because of invalid argument
ESP_FAIL: Set carrier for operator failed because of other error
Structures
-
struct mcpwm_operator_config_t
MCPWM operator configuration.
Public Members
-
int group_id
Specify from which group to allocate the MCPWM operator
-
int intr_priority
MCPWM operator interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
uint32_t update_gen_action_on_tez
Whether to update generator action when timer counts to zero
-
uint32_t update_gen_action_on_tep
Whether to update generator action when timer counts to peak
-
uint32_t update_gen_action_on_sync
Whether to update generator action on sync event
-
uint32_t update_dead_time_on_tez
Whether to update dead time when timer counts to zero
-
uint32_t update_dead_time_on_tep
Whether to update dead time when timer counts to peak
-
uint32_t update_dead_time_on_sync
Whether to update dead time on sync event
-
struct mcpwm_operator_config_t::[anonymous] flags
Extra configuration flags for operator
-
int group_id
-
struct mcpwm_brake_config_t
MCPWM brake configuration structure.
Public Members
-
mcpwm_fault_handle_t fault
Which fault causes the operator to brake
-
mcpwm_operator_brake_mode_t brake_mode
Brake mode
-
uint32_t cbc_recover_on_tez
Recovery CBC brake state on tez event
-
uint32_t cbc_recover_on_tep
Recovery CBC brake state on tep event
-
struct mcpwm_brake_config_t::[anonymous] flags
Extra flags for brake configuration
-
mcpwm_fault_handle_t fault
-
struct mcpwm_operator_event_callbacks_t
Group of supported MCPWM operator event callbacks.
备注
The callbacks are all running under ISR environment
Public Members
-
mcpwm_brake_event_cb_t on_brake_cbc
callback function when mcpwm operator brakes in CBC
-
mcpwm_brake_event_cb_t on_brake_ost
callback function when mcpwm operator brakes in OST
-
mcpwm_brake_event_cb_t on_brake_cbc
-
struct mcpwm_carrier_config_t
MCPWM carrier configuration structure.
Public Members
-
mcpwm_carrier_clock_source_t clk_src
MCPWM carrier clock source
-
uint32_t frequency_hz
Carrier frequency in Hz
-
uint32_t first_pulse_duration_us
The duration of the first PWM pulse, in us
-
float duty_cycle
Carrier duty cycle
-
uint32_t invert_before_modulate
Invert the raw signal
-
uint32_t invert_after_modulate
Invert the modulated signal
-
struct mcpwm_carrier_config_t::[anonymous] flags
Extra flags for carrier configuration
-
mcpwm_carrier_clock_source_t clk_src
Header File
This header file can be included with:
#include "driver/mcpwm_cmpr.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_comparator(mcpwm_oper_handle_t oper, const mcpwm_comparator_config_t *config, mcpwm_cmpr_handle_t *ret_cmpr)
Create MCPWM comparator.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator(), the new comparator will be allocated from this operatorconfig -- [in] MCPWM comparator configuration
ret_cmpr -- [out] Returned MCPWM comparator
- 返回
ESP_OK: Create MCPWM comparator successfully
ESP_ERR_INVALID_ARG: Create MCPWM comparator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM comparator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM comparator failed because can't find free resource
ESP_FAIL: Create MCPWM comparator failed because of other error
-
esp_err_t mcpwm_del_comparator(mcpwm_cmpr_handle_t cmpr)
Delete MCPWM comparator.
- 参数
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()- 返回
ESP_OK: Delete MCPWM comparator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM comparator failed because of invalid argument
ESP_FAIL: Delete MCPWM comparator failed because of other error
-
esp_err_t mcpwm_comparator_register_event_callbacks(mcpwm_cmpr_handle_t cmpr, const mcpwm_comparator_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM comparator.
备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_comparator_set_compare_value(mcpwm_cmpr_handle_t cmpr, uint32_t cmp_ticks)
Set MCPWM comparator's compare value.
- 参数
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()cmp_ticks -- [in] The new compare value
- 返回
ESP_OK: Set MCPWM compare value successfully
ESP_ERR_INVALID_ARG: Set MCPWM compare value failed because of invalid argument (e.g. the cmp_ticks is out of range)
ESP_ERR_INVALID_STATE: Set MCPWM compare value failed because the operator doesn't have a timer connected
ESP_FAIL: Set MCPWM compare value failed because of other error
Structures
-
struct mcpwm_comparator_config_t
MCPWM comparator configuration.
Public Members
-
int intr_priority
MCPWM comparator interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
uint32_t update_cmp_on_tez
Whether to update compare value when timer count equals to zero (tez)
-
uint32_t update_cmp_on_tep
Whether to update compare value when timer count equals to peak (tep)
-
uint32_t update_cmp_on_sync
Whether to update compare value on sync event
-
struct mcpwm_comparator_config_t::[anonymous] flags
Extra configuration flags for comparator
-
int intr_priority
-
struct mcpwm_comparator_event_callbacks_t
Group of supported MCPWM compare event callbacks.
备注
The callbacks are all running under ISR environment
Public Members
-
mcpwm_compare_event_cb_t on_reach
ISR callback function which would be invoked when counter reaches compare value
-
mcpwm_compare_event_cb_t on_reach
Header File
This header file can be included with:
#include "driver/mcpwm_gen.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_generator(mcpwm_oper_handle_t oper, const mcpwm_generator_config_t *config, mcpwm_gen_handle_t *ret_gen)
Allocate MCPWM generator from given operator.
- 参数
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM generator configuration
ret_gen -- [out] Returned MCPWM generator
- 返回
ESP_OK: Create MCPWM generator successfully
ESP_ERR_INVALID_ARG: Create MCPWM generator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM generator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM generator failed because can't find free resource
ESP_FAIL: Create MCPWM generator failed because of other error
-
esp_err_t mcpwm_del_generator(mcpwm_gen_handle_t gen)
Delete MCPWM generator.
- 参数
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()- 返回
ESP_OK: Delete MCPWM generator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM generator failed because of invalid argument
ESP_FAIL: Delete MCPWM generator failed because of other error
-
esp_err_t mcpwm_generator_set_force_level(mcpwm_gen_handle_t gen, int level, bool hold_on)
Set force level for MCPWM generator.
备注
The force level will be applied to the generator immediately, regardless any other events that would change the generator's behaviour.
备注
If the
hold_onis true, the force level will retain forever, until user removes the force level by setting the force level to-1.备注
If the
hold_onis false, the force level can be overridden by the next event action.备注
The force level set by this function can be inverted by GPIO matrix or dead-time module. So the level set here doesn't equal to the final output level.
- 参数
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()level -- [in] GPIO level to be applied to MCPWM generator, specially, -1 means to remove the force level
hold_on -- [in] Whether the forced PWM level should retain (i.e. will remain unchanged until manually remove the force level)
- 返回
ESP_OK: Set force level for MCPWM generator successfully
ESP_ERR_INVALID_ARG: Set force level for MCPWM generator failed because of invalid argument
ESP_FAIL: Set force level for MCPWM generator failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_timer_event(mcpwm_gen_handle_t gen, mcpwm_gen_timer_event_action_t ev_act)
Set generator action on MCPWM timer event.
- 参数
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM timer event action, can be constructed by
MCPWM_GEN_TIMER_EVENT_ACTIONhelper macro
- 返回
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_ERR_INVALID_STATE: Set generator action failed because of timer is not connected to operator
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_actions_on_timer_event(mcpwm_gen_handle_t gen, mcpwm_gen_timer_event_action_t ev_act, ...)
Set generator actions on multiple MCPWM timer events.
备注
This is an aggregation version of
mcpwm_generator_set_action_on_timer_event, which allows user to set multiple actions in one call.- 参数
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM timer event action list, must be terminated by
MCPWM_GEN_TIMER_EVENT_ACTION_END()
- 返回
ESP_OK: Set generator actions successfully
ESP_ERR_INVALID_ARG: Set generator actions failed because of invalid argument
ESP_ERR_INVALID_STATE: Set generator actions failed because of timer is not connected to operator
ESP_FAIL: Set generator actions failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_compare_event(mcpwm_gen_handle_t generator, mcpwm_gen_compare_event_action_t ev_act)
Set generator action on MCPWM compare event.
- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM compare event action, can be constructed by
MCPWM_GEN_COMPARE_EVENT_ACTIONhelper macro
- 返回
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_actions_on_compare_event(mcpwm_gen_handle_t generator, mcpwm_gen_compare_event_action_t ev_act, ...)
Set generator actions on multiple MCPWM compare events.
备注
This is an aggregation version of
mcpwm_generator_set_action_on_compare_event, which allows user to set multiple actions in one call.- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM compare event action list, must be terminated by
MCPWM_GEN_COMPARE_EVENT_ACTION_END()
- 返回
ESP_OK: Set generator actions successfully
ESP_ERR_INVALID_ARG: Set generator actions failed because of invalid argument
ESP_FAIL: Set generator actions failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_brake_event(mcpwm_gen_handle_t generator, mcpwm_gen_brake_event_action_t ev_act)
Set generator action on MCPWM brake event.
- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM brake event action, can be constructed by
MCPWM_GEN_BRAKE_EVENT_ACTIONhelper macro
- 返回
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_actions_on_brake_event(mcpwm_gen_handle_t generator, mcpwm_gen_brake_event_action_t ev_act, ...)
Set generator actions on multiple MCPWM brake events.
备注
This is an aggregation version of
mcpwm_generator_set_action_on_brake_event, which allows user to set multiple actions in one call.- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM brake event action list, must be terminated by
MCPWM_GEN_BRAKE_EVENT_ACTION_END()
- 返回
ESP_OK: Set generator actions successfully
ESP_ERR_INVALID_ARG: Set generator actions failed because of invalid argument
ESP_FAIL: Set generator actions failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_fault_event(mcpwm_gen_handle_t generator, mcpwm_gen_fault_event_action_t ev_act)
Set generator action on MCPWM Fault event.
- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM trigger event action, can be constructed by
MCPWM_GEN_FAULT_EVENT_ACTIONhelper macro
- 返回
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_sync_event(mcpwm_gen_handle_t generator, mcpwm_gen_sync_event_action_t ev_act)
Set generator action on MCPWM Sync event.
备注
The trigger only support one sync action, regardless of the kinds. Should not call this function more than once.
- 参数
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM trigger event action, can be constructed by
MCPWM_GEN_SYNC_EVENT_ACTIONhelper macro
- 返回
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_dead_time(mcpwm_gen_handle_t in_generator, mcpwm_gen_handle_t out_generator, const mcpwm_dead_time_config_t *config)
Set dead time for MCPWM generator.
备注
Due to a hardware limitation, you can't set rising edge delay for both MCPWM generator 0 and 1 at the same time, otherwise, there will be a conflict inside the dead time module. The same goes for the falling edge setting. But you can set both the rising edge and falling edge delay for the same MCPWM generator.
- 参数
in_generator -- [in] MCPWM generator, before adding the dead time
out_generator -- [in] MCPWM generator, after adding the dead time
config -- [in] MCPWM dead time configuration
- 返回
ESP_OK: Set dead time for MCPWM generator successfully
ESP_ERR_INVALID_ARG: Set dead time for MCPWM generator failed because of invalid argument
ESP_ERR_INVALID_STATE: Set dead time for MCPWM generator failed because of invalid state (e.g. delay module is already in use by other generator)
ESP_FAIL: Set dead time for MCPWM generator failed because of other error
Structures
-
struct mcpwm_generator_config_t
MCPWM generator configuration.
Public Members
-
int gen_gpio_num
The GPIO number used to output the PWM signal
-
uint32_t invert_pwm
Whether to invert the PWM signal (done by GPIO matrix)
-
uint32_t io_loop_back
For debug/test, the signal output from the GPIO will be fed to the input path as well
-
uint32_t io_od_mode
Configure the GPIO as open-drain mode
-
uint32_t pull_up
Whether to pull up internally
-
uint32_t pull_down
Whether to pull down internally
-
struct mcpwm_generator_config_t::[anonymous] flags
Extra configuration flags for generator
-
int gen_gpio_num
-
struct mcpwm_gen_timer_event_action_t
Generator action on specific timer event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_timer_event_t event
Timer event
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_compare_event_action_t
Generator action on specific comparator event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_cmpr_handle_t comparator
Comparator handle
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_brake_event_action_t
Generator action on specific brake event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_operator_brake_mode_t brake_mode
Brake mode
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_fault_event_action_t
Generator action on specific fault event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_fault_handle_t fault
Which fault as the trigger. Only support GPIO fault
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_sync_event_action_t
Generator action on specific sync event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_sync_handle_t sync
Which sync as the trigger
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_dead_time_config_t
MCPWM dead time configuration structure.
Public Members
-
uint32_t posedge_delay_ticks
delay time applied to rising edge, 0 means no rising delay time
-
uint32_t negedge_delay_ticks
delay time applied to falling edge, 0 means no falling delay time
-
uint32_t invert_output
Invert the signal after applied the dead time
-
struct mcpwm_dead_time_config_t::[anonymous] flags
Extra flags for dead time configuration
-
uint32_t posedge_delay_ticks
Macros
-
MCPWM_GEN_TIMER_EVENT_ACTION(dir, ev, act)
Help macros to construct a mcpwm_gen_timer_event_action_t entry.
-
MCPWM_GEN_TIMER_EVENT_ACTION_END()
-
MCPWM_GEN_COMPARE_EVENT_ACTION(dir, cmp, act)
Help macros to construct a mcpwm_gen_compare_event_action_t entry.
-
MCPWM_GEN_COMPARE_EVENT_ACTION_END()
-
MCPWM_GEN_BRAKE_EVENT_ACTION(dir, mode, act)
Help macros to construct a mcpwm_gen_brake_event_action_t entry.
-
MCPWM_GEN_BRAKE_EVENT_ACTION_END()
-
MCPWM_GEN_FAULT_EVENT_ACTION(dir, flt, act)
Help macros to construct a mcpwm_gen_fault_event_action_t entry.
-
MCPWM_GEN_SYNC_EVENT_ACTION(dir, syn, act)
Help macros to construct a mcpwm_gen_sync_event_action_t entry.
Header File
This header file can be included with:
#include "driver/mcpwm_fault.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_gpio_fault(const mcpwm_gpio_fault_config_t *config, mcpwm_fault_handle_t *ret_fault)
Create MCPWM GPIO fault.
- 参数
config -- [in] MCPWM GPIO fault configuration
ret_fault -- [out] Returned GPIO fault handle
- 返回
ESP_OK: Create MCPWM GPIO fault successfully
ESP_ERR_INVALID_ARG: Create MCPWM GPIO fault failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM GPIO fault failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM GPIO fault failed because can't find free resource
ESP_FAIL: Create MCPWM GPIO fault failed because of other error
-
esp_err_t mcpwm_new_soft_fault(const mcpwm_soft_fault_config_t *config, mcpwm_fault_handle_t *ret_fault)
Create MCPWM software fault.
- 参数
config -- [in] MCPWM software fault configuration
ret_fault -- [out] Returned software fault handle
- 返回
ESP_OK: Create MCPWM software fault successfully
ESP_ERR_INVALID_ARG: Create MCPWM software fault failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM software fault failed because out of memory
ESP_FAIL: Create MCPWM software fault failed because of other error
-
esp_err_t mcpwm_del_fault(mcpwm_fault_handle_t fault)
Delete MCPWM fault.
- 参数
fault -- [in] MCPWM fault handle allocated by
mcpwm_new_gpio_fault()ormcpwm_new_soft_fault()- 返回
ESP_OK: Delete MCPWM fault successfully
ESP_ERR_INVALID_ARG: Delete MCPWM fault failed because of invalid argument
ESP_FAIL: Delete MCPWM fault failed because of other error
-
esp_err_t mcpwm_soft_fault_activate(mcpwm_fault_handle_t fault)
Activate the software fault, trigger the fault event for once.
- 参数
fault -- [in] MCPWM soft fault, allocated by
mcpwm_new_soft_fault()- 返回
ESP_OK: Trigger MCPWM software fault event successfully
ESP_ERR_INVALID_ARG: Trigger MCPWM software fault event failed because of invalid argument
ESP_FAIL: Trigger MCPWM software fault event failed because of other error
-
esp_err_t mcpwm_fault_register_event_callbacks(mcpwm_fault_handle_t fault, const mcpwm_fault_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM fault.
备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数
fault -- [in] MCPWM GPIO fault handle, allocated by
mcpwm_new_gpio_fault()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
Structures
-
struct mcpwm_gpio_fault_config_t
MCPWM GPIO fault configuration structure.
Public Members
-
int group_id
In which MCPWM group that the GPIO fault belongs to
-
int intr_priority
MCPWM GPIO fault interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
int gpio_num
GPIO used by the fault signal
-
uint32_t active_level
On which level the fault signal is treated as active
-
uint32_t io_loop_back
For debug/test, the signal output from the GPIO will be fed to the input path as well
-
uint32_t pull_up
Whether to pull up internally
-
uint32_t pull_down
Whether to pull down internally
-
struct mcpwm_gpio_fault_config_t::[anonymous] flags
Extra configuration flags for GPIO fault
-
int group_id
-
struct mcpwm_soft_fault_config_t
MCPWM software fault configuration structure.
-
struct mcpwm_fault_event_callbacks_t
Group of supported MCPWM fault event callbacks.
备注
The callbacks are all running under ISR environment
Public Members
-
mcpwm_fault_event_cb_t on_fault_enter
ISR callback function that would be invoked when fault signal becomes active
-
mcpwm_fault_event_cb_t on_fault_exit
ISR callback function that would be invoked when fault signal becomes inactive
-
mcpwm_fault_event_cb_t on_fault_enter
Header File
This header file can be included with:
#include "driver/mcpwm_sync.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_timer_sync_src(mcpwm_timer_handle_t timer, const mcpwm_timer_sync_src_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM timer sync source.
- 参数
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()config -- [in] MCPWM timer sync source configuration
ret_sync -- [out] Returned MCPWM sync handle
- 返回
ESP_OK: Create MCPWM timer sync source successfully
ESP_ERR_INVALID_ARG: Create MCPWM timer sync source failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM timer sync source failed because out of memory
ESP_ERR_INVALID_STATE: Create MCPWM timer sync source failed because the timer has created a sync source before
ESP_FAIL: Create MCPWM timer sync source failed because of other error
-
esp_err_t mcpwm_new_gpio_sync_src(const mcpwm_gpio_sync_src_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM GPIO sync source.
- 参数
config -- [in] MCPWM GPIO sync source configuration
ret_sync -- [out] Returned MCPWM GPIO sync handle
- 返回
ESP_OK: Create MCPWM GPIO sync source successfully
ESP_ERR_INVALID_ARG: Create MCPWM GPIO sync source failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM GPIO sync source failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM GPIO sync source failed because can't find free resource
ESP_FAIL: Create MCPWM GPIO sync source failed because of other error
-
esp_err_t mcpwm_new_soft_sync_src(const mcpwm_soft_sync_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM software sync source.
- 参数
config -- [in] MCPWM software sync source configuration
ret_sync -- [out] Returned software sync handle
- 返回
ESP_OK: Create MCPWM software sync successfully
ESP_ERR_INVALID_ARG: Create MCPWM software sync failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM software sync failed because out of memory
ESP_FAIL: Create MCPWM software sync failed because of other error
-
esp_err_t mcpwm_del_sync_src(mcpwm_sync_handle_t sync)
Delete MCPWM sync source.
- 参数
sync -- [in] MCPWM sync handle, allocated by
mcpwm_new_timer_sync_src()ormcpwm_new_gpio_sync_src()ormcpwm_new_soft_sync_src()- 返回
ESP_OK: Delete MCPWM sync source successfully
ESP_ERR_INVALID_ARG: Delete MCPWM sync source failed because of invalid argument
ESP_FAIL: Delete MCPWM sync source failed because of other error
-
esp_err_t mcpwm_soft_sync_activate(mcpwm_sync_handle_t sync)
Activate the software sync, trigger the sync event for once.
- 参数
sync -- [in] MCPWM soft sync handle, allocated by
mcpwm_new_soft_sync_src()- 返回
ESP_OK: Trigger MCPWM software sync event successfully
ESP_ERR_INVALID_ARG: Trigger MCPWM software sync event failed because of invalid argument
ESP_FAIL: Trigger MCPWM software sync event failed because of other error
Structures
-
struct mcpwm_timer_sync_src_config_t
MCPWM timer sync source configuration.
Public Members
-
mcpwm_timer_event_t timer_event
Timer event, upon which MCPWM timer will generate the sync signal
-
uint32_t propagate_input_sync
The input sync signal would be routed to its sync output
-
struct mcpwm_timer_sync_src_config_t::[anonymous] flags
Extra configuration flags for timer sync source
-
mcpwm_timer_event_t timer_event
-
struct mcpwm_gpio_sync_src_config_t
MCPWM GPIO sync source configuration.
Public Members
-
int group_id
MCPWM group ID
-
int gpio_num
GPIO used by sync source
-
uint32_t active_neg
Whether the sync signal is active on negedge, by default, the sync signal's posedge is treated as active
-
uint32_t io_loop_back
For debug/test, the signal output from the GPIO will be fed to the input path as well
-
uint32_t pull_up
Whether to pull up internally
-
uint32_t pull_down
Whether to pull down internally
-
struct mcpwm_gpio_sync_src_config_t::[anonymous] flags
Extra configuration flags for GPIO sync source
-
int group_id
-
struct mcpwm_soft_sync_config_t
MCPWM software sync configuration structure.
Header File
This header file can be included with:
#include "driver/mcpwm_cap.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_capture_timer(const mcpwm_capture_timer_config_t *config, mcpwm_cap_timer_handle_t *ret_cap_timer)
Create MCPWM capture timer.
- 参数
config -- [in] MCPWM capture timer configuration
ret_cap_timer -- [out] Returned MCPWM capture timer handle
- 返回
ESP_OK: Create MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Create MCPWM capture timer failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM capture timer failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM capture timer failed because can't find free resource
ESP_FAIL: Create MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_del_capture_timer(mcpwm_cap_timer_handle_t cap_timer)
Delete MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- 返回
ESP_OK: Delete MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Delete MCPWM capture timer failed because of invalid argument
ESP_FAIL: Delete MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_enable(mcpwm_cap_timer_handle_t cap_timer)
Enable MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer handle, allocated by
mcpwm_new_capture_timer()- 返回
ESP_OK: Enable MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Enable MCPWM capture timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM capture timer failed because timer is enabled already
ESP_FAIL: Enable MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_disable(mcpwm_cap_timer_handle_t cap_timer)
Disable MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer handle, allocated by
mcpwm_new_capture_timer()- 返回
ESP_OK: Disable MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Disable MCPWM capture timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM capture timer failed because timer is disabled already
ESP_FAIL: Disable MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_start(mcpwm_cap_timer_handle_t cap_timer)
Start MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- 返回
ESP_OK: Start MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Start MCPWM capture timer failed because of invalid argument
ESP_FAIL: Start MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_stop(mcpwm_cap_timer_handle_t cap_timer)
Stop MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- 返回
ESP_OK: Stop MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Stop MCPWM capture timer failed because of invalid argument
ESP_FAIL: Stop MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_get_resolution(mcpwm_cap_timer_handle_t cap_timer, uint32_t *out_resolution)
Get MCPWM capture timer resolution, in Hz.
- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()out_resolution -- [out] Returned capture timer resolution, in Hz
- 返回
ESP_OK: Get capture timer resolution successfully
ESP_ERR_INVALID_ARG: Get capture timer resolution failed because of invalid argument
ESP_FAIL: Get capture timer resolution failed because of other error
-
esp_err_t mcpwm_capture_timer_set_phase_on_sync(mcpwm_cap_timer_handle_t cap_timer, const mcpwm_capture_timer_sync_phase_config_t *config)
Set sync phase for MCPWM capture timer.
- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()config -- [in] MCPWM capture timer sync phase configuration
- 返回
ESP_OK: Set sync phase for MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Set sync phase for MCPWM capture timer failed because of invalid argument
ESP_FAIL: Set sync phase for MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_new_capture_channel(mcpwm_cap_timer_handle_t cap_timer, const mcpwm_capture_channel_config_t *config, mcpwm_cap_channel_handle_t *ret_cap_channel)
Create MCPWM capture channel.
备注
The created capture channel won't be enabled until calling
mcpwm_capture_channel_enable- 参数
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer(), will be connected to the new capture channelconfig -- [in] MCPWM capture channel configuration
ret_cap_channel -- [out] Returned MCPWM capture channel
- 返回
ESP_OK: Create MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Create MCPWM capture channel failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM capture channel failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM capture channel failed because can't find free resource
ESP_FAIL: Create MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_del_capture_channel(mcpwm_cap_channel_handle_t cap_channel)
Delete MCPWM capture channel.
- 参数
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- 返回
ESP_OK: Delete MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Delete MCPWM capture channel failed because of invalid argument
ESP_FAIL: Delete MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_enable(mcpwm_cap_channel_handle_t cap_channel)
Enable MCPWM capture channel.
备注
This function will transit the channel state from init to enable.
备注
This function will enable the interrupt service, if it's lazy installed in
mcpwm_capture_channel_register_event_callbacks().- 参数
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- 返回
ESP_OK: Enable MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Enable MCPWM capture channel failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM capture channel failed because the channel is already enabled
ESP_FAIL: Enable MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_disable(mcpwm_cap_channel_handle_t cap_channel)
Disable MCPWM capture channel.
- 参数
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- 返回
ESP_OK: Disable MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Disable MCPWM capture channel failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM capture channel failed because the channel is not enabled yet
ESP_FAIL: Disable MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_register_event_callbacks(mcpwm_cap_channel_handle_t cap_channel, const mcpwm_capture_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM capture channel.
备注
The first call to this function needs to be before the call to
mcpwm_capture_channel_enable备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE: Set event callbacks failed because the channel is not in init state
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_capture_channel_trigger_soft_catch(mcpwm_cap_channel_handle_t cap_channel)
Trigger a catch by software.
- 参数
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- 返回
ESP_OK: Trigger software catch successfully
ESP_ERR_INVALID_ARG: Trigger software catch failed because of invalid argument
ESP_ERR_INVALID_STATE: Trigger software catch failed because the channel is not enabled yet
ESP_FAIL: Trigger software catch failed because of other error
Structures
-
struct mcpwm_capture_timer_config_t
MCPWM capture timer configuration structure.
Public Members
-
int group_id
Specify from which group to allocate the capture timer
-
mcpwm_capture_clock_source_t clk_src
MCPWM capture timer clock source
-
uint32_t resolution_hz
Resolution of capture timer
-
int group_id
-
struct mcpwm_capture_timer_sync_phase_config_t
MCPWM Capture timer sync phase configuration.
Public Members
-
mcpwm_sync_handle_t sync_src
The sync event source
-
uint32_t count_value
The count value that should lock to upon sync event
-
mcpwm_timer_direction_t direction
The count direction that should lock to upon sync event
-
mcpwm_sync_handle_t sync_src
-
struct mcpwm_capture_channel_config_t
MCPWM capture channel configuration structure.
Public Members
-
int gpio_num
GPIO used capturing input signal
-
int intr_priority
MCPWM capture interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
uint32_t prescale
Prescale of input signal, effective frequency = cap_input_clk/prescale
-
struct mcpwm_capture_channel_config_t::extra_capture_channel_flags flags
Extra configuration flags for capture channel
-
struct extra_capture_channel_flags
Extra configuration flags for capture channel.
Public Members
-
uint32_t pos_edge
Whether to capture on positive edge
-
uint32_t neg_edge
Whether to capture on negative edge
-
uint32_t pull_up
Whether to pull up internally
-
uint32_t pull_down
Whether to pull down internally
-
uint32_t invert_cap_signal
Invert the input capture signal
-
uint32_t io_loop_back
For debug/test, the signal output from the GPIO will be fed to the input path as well
-
uint32_t keep_io_conf_at_exit
Deprecated. Driver won't change the GPIO configuration in deinilization.
-
uint32_t pos_edge
-
int gpio_num
-
struct mcpwm_capture_event_callbacks_t
Group of supported MCPWM capture event callbacks.
备注
The callbacks are all running under ISR environment
Public Members
-
mcpwm_capture_event_cb_t on_cap
Callback function that would be invoked when capture event occurred
-
mcpwm_capture_event_cb_t on_cap
Header File
This header file can be included with:
#include "driver/mcpwm_etm.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_comparator_new_etm_event(mcpwm_cmpr_handle_t cmpr, const mcpwm_cmpr_etm_event_config_t *config, esp_etm_event_handle_t *out_event)
Get the ETM event for MCPWM comparator.
备注
The created ETM event object can be deleted later by calling
esp_etm_del_event- 参数
cmpr -- [in] MCPWM comparator, allocated by
mcpwm_new_comparator()ormcpwm_new_event_comparator()config -- [in] MCPWM ETM comparator event configuration
out_event -- [out] Returned ETM event handle
- 返回
ESP_OK: Get ETM event successfully
ESP_ERR_INVALID_ARG: Get ETM event failed because of invalid argument
ESP_FAIL: Get ETM event failed because of other error
Structures
-
struct mcpwm_cmpr_etm_event_config_t
MCPWM event comparator ETM event configuration.
Public Members
-
mcpwm_comparator_etm_event_type_t event_type
MCPWM comparator ETM event type
-
mcpwm_comparator_etm_event_type_t event_type
Header File
This header file can be included with:
#include "driver/mcpwm_types.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Structures
-
struct mcpwm_timer_event_data_t
MCPWM timer event data.
Public Members
-
uint32_t count_value
MCPWM timer count value
-
mcpwm_timer_direction_t direction
MCPWM timer count direction
-
uint32_t count_value
-
struct mcpwm_brake_event_data_t
MCPWM brake event data.
-
struct mcpwm_fault_event_data_t
MCPWM fault event data.
-
struct mcpwm_compare_event_data_t
MCPWM compare event data.
Public Members
-
uint32_t compare_ticks
Compare value
-
mcpwm_timer_direction_t direction
Count direction
-
uint32_t compare_ticks
-
struct mcpwm_capture_event_data_t
MCPWM capture event data.
Type Definitions
-
typedef struct mcpwm_timer_t *mcpwm_timer_handle_t
Type of MCPWM timer handle.
-
typedef struct mcpwm_oper_t *mcpwm_oper_handle_t
Type of MCPWM operator handle.
-
typedef struct mcpwm_cmpr_t *mcpwm_cmpr_handle_t
Type of MCPWM comparator handle.
-
typedef struct mcpwm_gen_t *mcpwm_gen_handle_t
Type of MCPWM generator handle.
-
typedef struct mcpwm_fault_t *mcpwm_fault_handle_t
Type of MCPWM fault handle.
-
typedef struct mcpwm_sync_t *mcpwm_sync_handle_t
Type of MCPWM sync handle.
-
typedef struct mcpwm_cap_timer_t *mcpwm_cap_timer_handle_t
Type of MCPWM capture timer handle.
-
typedef struct mcpwm_cap_channel_t *mcpwm_cap_channel_handle_t
Type of MCPWM capture channel handle.
-
typedef bool (*mcpwm_timer_event_cb_t)(mcpwm_timer_handle_t timer, const mcpwm_timer_event_data_t *edata, void *user_ctx)
MCPWM timer event callback function.
- Param timer
[in] MCPWM timer handle
- Param edata
[in] MCPWM timer event data, fed by driver
- Param user_ctx
[in] User data, set in
mcpwm_timer_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_brake_event_cb_t)(mcpwm_oper_handle_t oper, const mcpwm_brake_event_data_t *edata, void *user_ctx)
MCPWM operator brake event callback function.
- Param oper
[in] MCPWM operator handle
- Param edata
[in] MCPWM brake event data, fed by driver
- Param user_ctx
[in] User data, set in
mcpwm_operator_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_fault_event_cb_t)(mcpwm_fault_handle_t fault, const mcpwm_fault_event_data_t *edata, void *user_ctx)
MCPWM fault event callback function.
- Param fault
MCPWM fault handle
- Param edata
MCPWM fault event data, fed by driver
- Param user_ctx
User data, set in
mcpwm_fault_register_event_callbacks()- Return
whether a task switch is needed after the callback returns
-
typedef bool (*mcpwm_compare_event_cb_t)(mcpwm_cmpr_handle_t comparator, const mcpwm_compare_event_data_t *edata, void *user_ctx)
MCPWM comparator event callback function.
- Param comparator
MCPWM comparator handle
- Param edata
MCPWM comparator event data, fed by driver
- Param user_ctx
User data, set in
mcpwm_comparator_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_capture_event_cb_t)(mcpwm_cap_channel_handle_t cap_channel, const mcpwm_capture_event_data_t *edata, void *user_ctx)
MCPWM capture event callback function.
- Param cap_channel
MCPWM capture channel handle
- Param edata
MCPWM capture event data, fed by driver
- Param user_ctx
User data, set in
mcpwm_capture_channel_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
Header File
This header file can be included with:
#include "hal/mcpwm_types.h"
Type Definitions
-
typedef soc_periph_mcpwm_timer_clk_src_t mcpwm_timer_clock_source_t
MCPWM timer clock source.
-
typedef soc_periph_mcpwm_capture_clk_src_t mcpwm_capture_clock_source_t
MCPWM capture clock source.
-
typedef soc_periph_mcpwm_carrier_clk_src_t mcpwm_carrier_clock_source_t
MCPWM carrier clock source.
Enumerations
-
enum mcpwm_timer_direction_t
MCPWM timer count direction.
Values:
-
enumerator MCPWM_TIMER_DIRECTION_UP
Counting direction: Increase
-
enumerator MCPWM_TIMER_DIRECTION_DOWN
Counting direction: Decrease
-
enumerator MCPWM_TIMER_DIRECTION_UP
-
enum mcpwm_timer_event_t
MCPWM timer events.
Values:
-
enumerator MCPWM_TIMER_EVENT_EMPTY
MCPWM timer counts to zero (i.e. counter is empty)
-
enumerator MCPWM_TIMER_EVENT_FULL
MCPWM timer counts to peak (i.e. counter is full)
-
enumerator MCPWM_TIMER_EVENT_INVALID
MCPWM timer invalid event
-
enumerator MCPWM_TIMER_EVENT_EMPTY
-
enum mcpwm_timer_count_mode_t
MCPWM timer count modes.
Values:
-
enumerator MCPWM_TIMER_COUNT_MODE_PAUSE
MCPWM timer paused
-
enumerator MCPWM_TIMER_COUNT_MODE_UP
MCPWM timer counting up
-
enumerator MCPWM_TIMER_COUNT_MODE_DOWN
MCPWM timer counting down
-
enumerator MCPWM_TIMER_COUNT_MODE_UP_DOWN
MCPWM timer counting up and down
-
enumerator MCPWM_TIMER_COUNT_MODE_PAUSE
-
enum mcpwm_timer_start_stop_cmd_t
MCPWM timer commands, specify the way to start or stop the timer.
Values:
-
enumerator MCPWM_TIMER_STOP_EMPTY
MCPWM timer stops when next count reaches zero
-
enumerator MCPWM_TIMER_STOP_FULL
MCPWM timer stops when next count reaches peak
-
enumerator MCPWM_TIMER_START_NO_STOP
MCPWM timer starts couting, and don't stop until received stop command
-
enumerator MCPWM_TIMER_START_STOP_EMPTY
MCPWM timer starts counting and stops when next count reaches zero
-
enumerator MCPWM_TIMER_START_STOP_FULL
MCPWM timer starts counting and stops when next count reaches peak
-
enumerator MCPWM_TIMER_STOP_EMPTY
-
enum mcpwm_generator_action_t
MCPWM generator actions.
Values:
-
enumerator MCPWM_GEN_ACTION_KEEP
Generator action: Keep the same level
-
enumerator MCPWM_GEN_ACTION_LOW
Generator action: Force to low level
-
enumerator MCPWM_GEN_ACTION_HIGH
Generator action: Force to high level
-
enumerator MCPWM_GEN_ACTION_TOGGLE
Generator action: Toggle level
-
enumerator MCPWM_GEN_ACTION_KEEP
-
enum mcpwm_operator_brake_mode_t
MCPWM operator brake mode.
Values:
-
enumerator MCPWM_OPER_BRAKE_MODE_CBC
Brake mode: CBC (cycle by cycle)
-
enumerator MCPWM_OPER_BRAKE_MODE_OST
Brake mode: OST (one shot)
-
enumerator MCPWM_OPER_BRAKE_MODE_INVALID
MCPWM operator invalid brake mode
-
enumerator MCPWM_OPER_BRAKE_MODE_CBC
-
enum mcpwm_capture_edge_t
MCPWM capture edge.
Values:
-
enumerator MCPWM_CAP_EDGE_POS
Capture on the positive edge
-
enumerator MCPWM_CAP_EDGE_NEG
Capture on the negative edge
-
enumerator MCPWM_CAP_EDGE_POS