触摸传感器¶
概述¶
触摸传感器系统由保护覆盖层、触摸电极、绝缘基板和走线组成,保护覆盖层位于最上层,绝缘基板上设有电极及走线。用户触摸覆盖层将产生电容变化,根据电容变化判断此次触摸是否为有效触摸行为。
ESP32 可支持最多 10 个电容式触摸板/GPIO,触摸板可以以矩阵或滑条等方式组合使用,从而覆盖更大触感区域及更多触感点。触摸传感由有限状态机 (FSM) 硬件控制,由软件或专用硬件计时器发起。
如需了解触摸传感器设计、操作及其控制寄存器等相关信息,请参考《ESP32 技术参考手册》(PDF),您也可以在《ESP32 技术参考手册》中查看这一子系统是如何运行的。
请参考 触摸传感器应用方案简介,查看触摸传感器设计详情和固件开发指南。如果不想亲自在多种配置环境下测试触摸传感器,请查看 ESP32 触摸功能开发套件。
功能介绍¶
下面将 API 分解成几个函数组进行介绍,帮助您快速了解以下功能:
初始化触摸板驱动程序
配置触摸板 GPIO 管脚
触摸状态测量
调整测量参数(优化测量)
过滤触摸测量
触摸监测方式
设置中断信号监测触碰动作
中断触发
请前往 API 参考 章节,查看某一函数的具体描述。应用示例 章节则介绍了此 API 的具体实现。
初始化触摸板驱动程序¶
使用触摸板之前,需要先调用 touch_pad_init() 函数初始化触摸板驱动程序。此函数设置了 API 参考 项下的 Macros 中列出的几项 .._DEFAULT 驱动程序参数,同时删除之前设置过的触摸板信息(如有),并禁用中断。
如果不再需要该驱动程序,可以调用 touch_pad_deinit() 释放已初始化的驱动程序。
配置触摸板 GPIO 管脚¶
调用 touch_pad_config() 使能某一 GPIO 的触感功能。
使用 touch_pad_set_fsm_mode() 选择触摸板测量(由 FSM 操作)是由硬件计时器自动启动,还是由软件自动启动。如果选择软件模式,请使用 touch_pad_sw_start() 启动 FSM。
触摸状态测量¶
借助以下两个函数从传感器读取原始数据或过滤后的数据:
这两个函数也可以用于检查触碰和释放触摸板时传感器读数变化范围,来评估触摸板设计,然后根据这些信息设定触摸阈值。
注解
使用 touch_pad_read_filtered() 之前,需要先调用 过滤触摸测量 中特定的滤波器函数初始化并配置该滤波器。
请参考应用示例 peripherals/touch_pad_read,查看如何使用这两个读值函数。
优化测量¶
触摸传感器设有数个可配置参数,以适应触摸板设计特点。例如,如果需要感知较细微的电容变化,则可以缩小触摸板充放电的参考电压范围。您可以使用 touch_pad_set_voltage() 函数设置电压参考低值和参考高值。
优化测量除了可以识别细微的电容变化之外,还可以降低应用程序功耗,但可能会增加测量噪声干扰。如果得到的动态读数范围结果比较理想,则可以调用 touch_pad_set_meas_time() 函数来减少测量时间,从而进一步降低功耗。
可用的测量参数及相应的 ‘set’ 函数总结如下:
触摸板充放电参数:
速率(斜率)
touch_pad_set_cnt_mode()
电压门限(参考低值/参考高值)、速率(斜率)与测量时间的关系如下图所示:
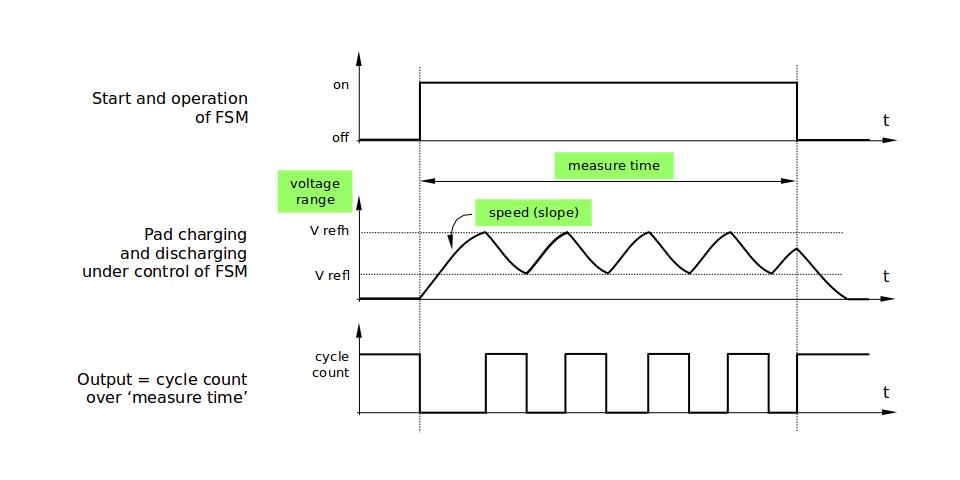
触摸板 - 测量参数之间的关系¶
上图中的 Output 代表触摸传感器读值,即一个测量周期内测得的脉冲计数值。
所有函数均成对出现,用于设定某一特定参数,并获取当前参数值。例如:touch_pad_set_voltage() 和 touch_pad_get_voltage()。
过滤触摸测量¶
如果测量中存在噪声,可以使用提供的 API 函数对测量进行过滤。使用滤波器之前,请先调用 touch_pad_filter_start() 启动该滤波器。
滤波器类型为 IIR(无限脉冲响应滤波器),您可以调用 touch_pad_set_filter_period() 配置此类滤波器的采样周期。
如需停止滤波器,请调用 touch_pad_filter_stop() 函数。如果不再使用该滤波器,请调用 touch_pad_filter_delete() 删除此滤波器。
触摸监测¶
触摸监测基于用户配置的阈值和 FSM 执行的原始测量,并由 ESP32 硬件实现。你可以调用 touch_pad_get_status() 查看被触碰的触摸板,或调用 touch_pad_clear_status() 清除触摸状态信息。
您也可以将硬件触摸监测连接至中断,详细介绍见下一章节。
如果测量中存在噪声,且电容变化幅度较小,硬件触摸监测结果可能就不太理想。如需解决这一问题,不建议使用硬件监测或中断信号,建议您在自己的应用程序中采用测量过滤,并执行触摸监测。请参考 peripherals/touch_pad_interrupt,查看以上两种触摸监测的实现方式。
中断触发¶
在对触摸监测启用中断之前,请先设置一个触摸监测阈值。然后使用 触摸状态测量 中所述的函数读取并显示触摸和释放触摸板时测得的结果。如果测量中存在噪声且相对电容变化较小,请使用滤波器。您也可以根据应用程序和环境条件,测试温度和电源电压变化对测量值的影响。
确定监测阈值后就可以在初始化时调用 touch_pad_config() 设置此阈值,或在运行时调用 touch_pad_set_thresh() 设置此阈值。
下一步就是设置如何触发中断。您可以设置在阈值以下或以上触发中断,具体触发模式由函数 touch_pad_set_trigger_mode() 设置。
最后您可以使用以下函数配置和管理中断调用:
中断配置完成后,您可以调用 touch_pad_get_status() 查看中断信号来自哪个触摸板,也可以调用 touch_pad_clear_status() 清除触摸板状态信息。
注解
触摸监测中的中断信号基于原始/未经过滤的测量值(对比用户设置的阈值),并在硬件中实现。启用软件滤波 API 并不会影响这一过程,见 过滤触摸测量。
从睡眠模式唤醒¶
如果使用触摸板中断将芯片从睡眠模式唤醒,您可以选择配置一些触摸板,例如 SET1 或 SET1 和 SET2,触摸这些触摸板将触发中断并唤醒芯片。请调用 touch_pad_set_trigger_source() 实现上述操作。
您可以使用以下函数管理 ‘SET’ 中触摸板所需的位模式配置:
应用示例¶
触摸传感器读值示例:peripherals/touch_pad_read
触摸传感器中断示例:peripherals/touch_pad_interrupt
API 参考¶
Header File¶
Functions¶
-
esp_err_t
touch_pad_config(touch_pad_t touch_num, uint16_t threshold)¶ Configure touch pad interrupt threshold.
- Note
If FSM mode is set to TOUCH_FSM_MODE_TIMER, this function will be blocked for one measurement cycle and wait for data to be valid.
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG if argument wrong
ESP_FAIL if touch pad not initialized
- Parameters
touch_num: touch pad indexthreshold: interrupt threshold,
-
esp_err_t
touch_pad_read(touch_pad_t touch_num, uint16_t *touch_value)¶ get touch sensor counter value. Each touch sensor has a counter to count the number of charge/discharge cycles. When the pad is not ‘touched’, we can get a number of the counter. When the pad is ‘touched’, the value in counter will get smaller because of the larger equivalent capacitance.
- Note
This API requests hardware measurement once. If IIR filter mode is enabled, please use ‘touch_pad_read_raw_data’ interface instead.
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG Touch pad parameter error
ESP_ERR_INVALID_STATE This touch pad hardware connection is error, the value of “touch_value” is 0.
ESP_FAIL Touch pad not initialized
- Parameters
touch_num: touch pad indextouch_value: pointer to accept touch sensor value
-
esp_err_t
touch_pad_read_filtered(touch_pad_t touch_num, uint16_t *touch_value)¶ get filtered touch sensor counter value by IIR filter.
- Note
touch_pad_filter_start has to be called before calling touch_pad_read_filtered. This function can be called from ISR
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG Touch pad parameter error
ESP_ERR_INVALID_STATE This touch pad hardware connection is error, the value of “touch_value” is 0.
ESP_FAIL Touch pad not initialized
- Parameters
touch_num: touch pad indextouch_value: pointer to accept touch sensor value
-
esp_err_t
touch_pad_read_raw_data(touch_pad_t touch_num, uint16_t *touch_value)¶ get raw data (touch sensor counter value) from IIR filter process. Need not request hardware measurements.
- Note
touch_pad_filter_start has to be called before calling touch_pad_read_raw_data. This function can be called from ISR
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG Touch pad parameter error
ESP_ERR_INVALID_STATE This touch pad hardware connection is error, the value of “touch_value” is 0.
ESP_FAIL Touch pad not initialized
- Parameters
touch_num: touch pad indextouch_value: pointer to accept touch sensor value
-
esp_err_t
touch_pad_set_filter_read_cb(filter_cb_t read_cb)¶ Register the callback function that is called after each IIR filter calculation.
- Note
The ‘read_cb’ callback is called in timer task in each filtering cycle.
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG set error
- Parameters
read_cb: Pointer to filtered callback function. If the argument passed in is NULL, the callback will stop.
-
esp_err_t
touch_pad_isr_register(intr_handler_t fn, void *arg)¶ Register touch-pad ISR. The handler will be attached to the same CPU core that this function is running on.
- Return
ESP_OK Success ;
ESP_ERR_INVALID_ARG GPIO error
ESP_ERR_NO_MEM No memory
- Parameters
fn: Pointer to ISR handlerarg: Parameter for ISR
-
esp_err_t
touch_pad_set_meas_time(uint16_t sleep_cycle, uint16_t meas_cycle)¶ Set touch sensor measurement and sleep time. Excessive total time will slow down the touch response. Too small measurement time will not be sampled enough, resulting in inaccurate measurements.
- Note
The greater the duty cycle of the measurement time, the more system power is consumed.
- Return
ESP_OK on success
- Parameters
sleep_cycle: The touch sensor will sleep after each measurement. sleep_cycle decide the interval between each measurement. t_sleep = sleep_cycle / (RTC_SLOW_CLK frequency). The approximate frequency value of RTC_SLOW_CLK can be obtained using rtc_clk_slow_freq_get_hz function.meas_cycle: The duration of the touch sensor measurement. t_meas = meas_cycle / 8M, the maximum measure time is 0xffff / 8M = 8.19 ms
-
esp_err_t
touch_pad_get_meas_time(uint16_t *sleep_cycle, uint16_t *meas_cycle)¶ Get touch sensor measurement and sleep time.
- Return
ESP_OK on success
- Parameters
sleep_cycle: Pointer to accept sleep cycle numbermeas_cycle: Pointer to accept measurement cycle count.
-
esp_err_t
touch_pad_sw_start(void)¶ Trigger a touch sensor measurement, only support in SW mode of FSM.
- Return
ESP_OK on success
-
esp_err_t
touch_pad_set_thresh(touch_pad_t touch_num, uint16_t threshold)¶ Set touch sensor interrupt threshold.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
touch_num: touch pad indexthreshold: threshold of touchpad count, refer to touch_pad_set_trigger_mode to see how to set trigger mode.
-
esp_err_t
touch_pad_get_thresh(touch_pad_t touch_num, uint16_t *threshold)¶ Get touch sensor interrupt threshold.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
touch_num: touch pad indexthreshold: pointer to accept threshold
-
esp_err_t
touch_pad_set_trigger_mode(touch_trigger_mode_t mode)¶ Set touch sensor interrupt trigger mode. Interrupt can be triggered either when counter result is less than threshold or when counter result is more than threshold.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
mode: touch sensor interrupt trigger mode
-
esp_err_t
touch_pad_get_trigger_mode(touch_trigger_mode_t *mode)¶ Get touch sensor interrupt trigger mode.
- Return
ESP_OK on success
- Parameters
mode: pointer to accept touch sensor interrupt trigger mode
-
esp_err_t
touch_pad_set_trigger_source(touch_trigger_src_t src)¶ Set touch sensor interrupt trigger source. There are two sets of touch signals. Set1 and set2 can be mapped to several touch signals. Either set will be triggered if at least one of its touch signal is ‘touched’. The interrupt can be configured to be generated if set1 is triggered, or only if both sets are triggered.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
src: touch sensor interrupt trigger source
-
esp_err_t
touch_pad_get_trigger_source(touch_trigger_src_t *src)¶ Get touch sensor interrupt trigger source.
- Return
ESP_OK on success
- Parameters
src: pointer to accept touch sensor interrupt trigger source
-
esp_err_t
touch_pad_set_group_mask(uint16_t set1_mask, uint16_t set2_mask, uint16_t en_mask)¶ Set touch sensor group mask. Touch pad module has two sets of signals, ‘Touched’ signal is triggered only if at least one of touch pad in this group is “touched”. This function will set the register bits according to the given bitmask.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
set1_mask: bitmask of touch sensor signal group1, it’s a 10-bit valueset2_mask: bitmask of touch sensor signal group2, it’s a 10-bit valueen_mask: bitmask of touch sensor work enable, it’s a 10-bit value
-
esp_err_t
touch_pad_get_group_mask(uint16_t *set1_mask, uint16_t *set2_mask, uint16_t *en_mask)¶ Get touch sensor group mask.
- Return
ESP_OK on success
- Parameters
set1_mask: pointer to accept bitmask of touch sensor signal group1, it’s a 10-bit valueset2_mask: pointer to accept bitmask of touch sensor signal group2, it’s a 10-bit valueen_mask: pointer to accept bitmask of touch sensor work enable, it’s a 10-bit value
-
esp_err_t
touch_pad_clear_group_mask(uint16_t set1_mask, uint16_t set2_mask, uint16_t en_mask)¶ Clear touch sensor group mask. Touch pad module has two sets of signals, Interrupt is triggered only if at least one of touch pad in this group is “touched”. This function will clear the register bits according to the given bitmask.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
set1_mask: bitmask touch sensor signal group1, it’s a 10-bit valueset2_mask: bitmask touch sensor signal group2, it’s a 10-bit valueen_mask: bitmask of touch sensor work enable, it’s a 10-bit value
-
esp_err_t
touch_pad_set_filter_period(uint32_t new_period_ms)¶ set touch pad filter calibration period, in ms. Need to call touch_pad_filter_start before all touch filter APIs
- Return
ESP_OK Success
ESP_ERR_INVALID_STATE driver state error
ESP_ERR_INVALID_ARG parameter error
- Parameters
new_period_ms: filter period, in ms
-
esp_err_t
touch_pad_get_filter_period(uint32_t *p_period_ms)¶ get touch pad filter calibration period, in ms Need to call touch_pad_filter_start before all touch filter APIs
- Return
ESP_OK Success
ESP_ERR_INVALID_STATE driver state error
ESP_ERR_INVALID_ARG parameter error
- Parameters
p_period_ms: pointer to accept period
-
esp_err_t
touch_pad_filter_start(uint32_t filter_period_ms)¶ start touch pad filter function This API will start a filter to process the noise in order to prevent false triggering when detecting slight change of capacitance. Need to call touch_pad_filter_start before all touch filter APIs
- Note
This filter uses FreeRTOS timer, which is dispatched from a task with priority 1 by default on CPU 0. So if some application task with higher priority takes a lot of CPU0 time, then the quality of data obtained from this filter will be affected. You can adjust FreeRTOS timer task priority in menuconfig.
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG parameter error
ESP_ERR_NO_MEM No memory for driver
ESP_ERR_INVALID_STATE driver state error
- Parameters
filter_period_ms: filter calibration period, in ms
Type Definitions¶
-
typedef void (*
filter_cb_t)(uint16_t *raw_value, uint16_t *filtered_value)¶ Callback function that is called after each IIR filter calculation.
- Note
This callback is called in timer task in each filtering cycle.
- Note
This callback should not be blocked.
- Parameters
raw_value: The latest raw data(touch sensor counter value) that points to all channels(raw_value[0..TOUCH_PAD_MAX-1]).filtered_value: The latest IIR filtered data(calculated from raw data) that points to all channels(filtered_value[0..TOUCH_PAD_MAX-1]).
Header File¶
Functions¶
-
esp_err_t
touch_pad_init(void)¶ Initialize touch module.
- Note
If default parameter don’t match the usage scenario, it can be changed after this function.
- Return
ESP_OK Success
ESP_ERR_NO_MEM Touch pad init error
ESP_ERR_NOT_SUPPORTED Touch pad is providing current to external XTAL
-
esp_err_t
touch_pad_deinit(void)¶ Un-install touch pad driver.
- Note
After this function is called, other touch functions are prohibited from being called.
- Return
ESP_OK Success
ESP_FAIL Touch pad driver not initialized
-
esp_err_t
touch_pad_io_init(touch_pad_t touch_num)¶ Initialize touch pad GPIO.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
touch_num: touch pad index
-
esp_err_t
touch_pad_set_voltage(touch_high_volt_t refh, touch_low_volt_t refl, touch_volt_atten_t atten)¶ Set touch sensor high voltage threshold of chanrge. The touch sensor measures the channel capacitance value by charging and discharging the channel. So the high threshold should be less than the supply voltage.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
refh: the value of DREFHrefl: the value of DREFLatten: the attenuation on DREFH
-
esp_err_t
touch_pad_get_voltage(touch_high_volt_t *refh, touch_low_volt_t *refl, touch_volt_atten_t *atten)¶ Get touch sensor reference voltage,.
- Return
ESP_OK on success
- Parameters
refh: pointer to accept DREFH valuerefl: pointer to accept DREFL valueatten: pointer to accept the attenuation on DREFH
-
esp_err_t
touch_pad_set_cnt_mode(touch_pad_t touch_num, touch_cnt_slope_t slope, touch_tie_opt_t opt)¶ Set touch sensor charge/discharge speed for each pad. If the slope is 0, the counter would always be zero. If the slope is 1, the charging and discharging would be slow, accordingly. If the slope is set 7, which is the maximum value, the charging and discharging would be fast.
- Note
The higher the charge and discharge current, the greater the immunity of the touch channel, but it will increase the system power consumption.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
touch_num: touch pad indexslope: touch pad charge/discharge speedopt: the initial voltage
-
esp_err_t
touch_pad_get_cnt_mode(touch_pad_t touch_num, touch_cnt_slope_t *slope, touch_tie_opt_t *opt)¶ Get touch sensor charge/discharge speed for each pad.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
touch_num: touch pad indexslope: pointer to accept touch pad charge/discharge slopeopt: pointer to accept the initial voltage
-
esp_err_t
touch_pad_isr_deregister(void (*fn)(void *), void *arg, )¶ Deregister the handler previously registered using touch_pad_isr_handler_register.
- Return
ESP_OK on success
ESP_ERR_INVALID_STATE if a handler matching both fn and arg isn’t registered
- Parameters
fn: handler function to call (as passed to touch_pad_isr_handler_register)arg: argument of the handler (as passed to touch_pad_isr_handler_register)
-
esp_err_t
touch_pad_get_wakeup_status(touch_pad_t *pad_num)¶ Get the touch pad which caused wakeup from deep sleep.
- Return
ESP_OK Success
ESP_ERR_INVALID_ARG parameter is NULL
- Parameters
pad_num: pointer to touch pad which caused wakeup
-
esp_err_t
touch_pad_set_fsm_mode(touch_fsm_mode_t mode)¶ Set touch sensor FSM mode, the test action can be triggered by the timer, as well as by the software.
- Return
ESP_OK on success
ESP_ERR_INVALID_ARG if argument is wrong
- Parameters
mode: FSM mode
-
esp_err_t
touch_pad_get_fsm_mode(touch_fsm_mode_t *mode)¶ Get touch sensor FSM mode.
- Return
ESP_OK on success
- Parameters
mode: pointer to accept FSM mode
-
esp_err_t
touch_pad_clear_status(void)¶ To clear the touch sensor channel active status.
- Note
The FSM automatically updates the touch sensor status. It is generally not necessary to call this API to clear the status.
- Return
ESP_OK on success
-
uint32_t
touch_pad_get_status(void)¶ Get the touch sensor channel active status mask. The bit position represents the channel number. The 0/1 status of the bit represents the trigger status.
- Return
The touch sensor status. e.g. Touch1 trigger status is
status_mask & (BIT1).
-
bool
touch_pad_meas_is_done(void)¶ Check touch sensor measurement status.
- Return
True measurement is under way
False measurement done
GPIO 宏查找表¶
您可以使用宏定义某一触摸板通道的 GPIO,或定义某一 GPIO 的通道。例如:
TOUCH_PAD_NUM5_GPIO_NUM定义了通道 5 的 GPIO(即 GPIO 12);TOUCH_PAD_GPIO4_CHANNEL定义了 GPIO 4 的通道(即通道 0)。
Macros¶
-
TOUCH_PAD_GPIO4_CHANNEL¶
-
TOUCH_PAD_NUM0_GPIO_NUM¶
-
TOUCH_PAD_GPIO0_CHANNEL¶
-
TOUCH_PAD_NUM1_GPIO_NUM¶
-
TOUCH_PAD_GPIO2_CHANNEL¶
-
TOUCH_PAD_NUM2_GPIO_NUM¶
-
TOUCH_PAD_GPIO15_CHANNEL¶
-
TOUCH_PAD_NUM3_GPIO_NUM¶
-
TOUCH_PAD_GPIO13_CHANNEL¶
-
TOUCH_PAD_NUM4_GPIO_NUM¶
-
TOUCH_PAD_GPIO12_CHANNEL¶
-
TOUCH_PAD_NUM5_GPIO_NUM¶
-
TOUCH_PAD_GPIO14_CHANNEL¶
-
TOUCH_PAD_NUM6_GPIO_NUM¶
-
TOUCH_PAD_GPIO27_CHANNEL¶
-
TOUCH_PAD_NUM7_GPIO_NUM¶
-
TOUCH_PAD_GPIO33_CHANNEL¶
-
TOUCH_PAD_NUM8_GPIO_NUM¶
-
TOUCH_PAD_GPIO32_CHANNEL¶
-
TOUCH_PAD_NUM9_GPIO_NUM¶
Header File¶
Macros¶
-
TOUCH_PAD_SLOPE_DEFAULT¶
-
TOUCH_PAD_TIE_OPT_DEFAULT¶
-
TOUCH_PAD_BIT_MASK_MAX¶
-
TOUCH_PAD_HIGH_VOLTAGE_THRESHOLD¶
-
TOUCH_PAD_LOW_VOLTAGE_THRESHOLD¶
-
TOUCH_PAD_ATTEN_VOLTAGE_THRESHOLD¶
-
TOUCH_PAD_IDLE_CH_CONNECT_DEFAULT¶
-
TOUCH_PAD_THRESHOLD_MAX¶ If set touch threshold max value, The touch sensor can’t be in touched status
-
TOUCH_PAD_SLEEP_CYCLE_DEFAULT¶ The timer frequency is RTC_SLOW_CLK (can be 150k or 32k depending on the options), max value is 0xffff
-
TOUCH_PAD_MEASURE_CYCLE_DEFAULT¶ The timer frequency is 8Mhz, the max value is 0x7fff
-
TOUCH_FSM_MODE_DEFAULT¶ The touch FSM my be started by the software or timer
-
TOUCH_TRIGGER_MODE_DEFAULT¶ Interrupts can be triggered if sensor value gets below or above threshold
-
TOUCH_TRIGGER_SOURCE_DEFAULT¶ The wakeup trigger source can be SET1 or both SET1 and SET2
Enumerations¶
-
enum
touch_pad_t¶ Touch pad channel
Values:
-
TOUCH_PAD_NUM0= 0¶ Touch pad channel 0 is GPIO4(ESP32)
-
TOUCH_PAD_NUM1¶ Touch pad channel 1 is GPIO0(ESP32) / GPIO1(ESP32-S2)
-
TOUCH_PAD_NUM2¶ Touch pad channel 2 is GPIO2(ESP32) / GPIO2(ESP32-S2)
-
TOUCH_PAD_NUM3¶ Touch pad channel 3 is GPIO15(ESP32) / GPIO3(ESP32-S2)
-
TOUCH_PAD_NUM4¶ Touch pad channel 4 is GPIO13(ESP32) / GPIO4(ESP32-S2)
-
TOUCH_PAD_NUM5¶ Touch pad channel 5 is GPIO12(ESP32) / GPIO5(ESP32-S2)
-
TOUCH_PAD_NUM6¶ Touch pad channel 6 is GPIO14(ESP32) / GPIO6(ESP32-S2)
-
TOUCH_PAD_NUM7¶ Touch pad channel 7 is GPIO27(ESP32) / GPIO7(ESP32-S2)
-
TOUCH_PAD_NUM8¶ Touch pad channel 8 is GPIO33(ESP32) / GPIO8(ESP32-S2)
-
TOUCH_PAD_NUM9¶ Touch pad channel 9 is GPIO32(ESP32) / GPIO9(ESP32-S2)
-
TOUCH_PAD_MAX¶
-
-
enum
touch_high_volt_t¶ Touch sensor high reference voltage
Values:
-
TOUCH_HVOLT_KEEP= -1¶ Touch sensor high reference voltage, no change
-
TOUCH_HVOLT_2V4= 0¶ Touch sensor high reference voltage, 2.4V
-
TOUCH_HVOLT_2V5¶ Touch sensor high reference voltage, 2.5V
-
TOUCH_HVOLT_2V6¶ Touch sensor high reference voltage, 2.6V
-
TOUCH_HVOLT_2V7¶ Touch sensor high reference voltage, 2.7V
-
TOUCH_HVOLT_MAX¶
-
-
enum
touch_low_volt_t¶ Touch sensor low reference voltage
Values:
-
TOUCH_LVOLT_KEEP= -1¶ Touch sensor low reference voltage, no change
-
TOUCH_LVOLT_0V5= 0¶ Touch sensor low reference voltage, 0.5V
-
TOUCH_LVOLT_0V6¶ Touch sensor low reference voltage, 0.6V
-
TOUCH_LVOLT_0V7¶ Touch sensor low reference voltage, 0.7V
-
TOUCH_LVOLT_0V8¶ Touch sensor low reference voltage, 0.8V
-
TOUCH_LVOLT_MAX¶
-
-
enum
touch_volt_atten_t¶ Touch sensor high reference voltage attenuation
Values:
-
TOUCH_HVOLT_ATTEN_KEEP= -1¶ Touch sensor high reference voltage attenuation, no change
-
TOUCH_HVOLT_ATTEN_1V5= 0¶ Touch sensor high reference voltage attenuation, 1.5V attenuation
-
TOUCH_HVOLT_ATTEN_1V¶ Touch sensor high reference voltage attenuation, 1.0V attenuation
-
TOUCH_HVOLT_ATTEN_0V5¶ Touch sensor high reference voltage attenuation, 0.5V attenuation
-
TOUCH_HVOLT_ATTEN_0V¶ Touch sensor high reference voltage attenuation, 0V attenuation
-
TOUCH_HVOLT_ATTEN_MAX¶
-
-
enum
touch_cnt_slope_t¶ Touch sensor charge/discharge speed
Values:
-
TOUCH_PAD_SLOPE_0= 0¶ Touch sensor charge / discharge speed, always zero
-
TOUCH_PAD_SLOPE_1= 1¶ Touch sensor charge / discharge speed, slowest
-
TOUCH_PAD_SLOPE_2= 2¶ Touch sensor charge / discharge speed
-
TOUCH_PAD_SLOPE_3= 3¶ Touch sensor charge / discharge speed
-
TOUCH_PAD_SLOPE_4= 4¶ Touch sensor charge / discharge speed
-
TOUCH_PAD_SLOPE_5= 5¶ Touch sensor charge / discharge speed
-
TOUCH_PAD_SLOPE_6= 6¶ Touch sensor charge / discharge speed
-
TOUCH_PAD_SLOPE_7= 7¶ Touch sensor charge / discharge speed, fast
-
TOUCH_PAD_SLOPE_MAX¶
-
-
enum
touch_tie_opt_t¶ Touch sensor initial charge level
Values:
-
TOUCH_PAD_TIE_OPT_LOW= 0¶ Initial level of charging voltage, low level
-
TOUCH_PAD_TIE_OPT_HIGH= 1¶ Initial level of charging voltage, high level
-
TOUCH_PAD_TIE_OPT_MAX¶
-
-
enum
touch_fsm_mode_t¶ Touch sensor FSM mode
Values:
-
TOUCH_FSM_MODE_TIMER= 0¶ To start touch FSM by timer
-
TOUCH_FSM_MODE_SW¶ To start touch FSM by software trigger
-
TOUCH_FSM_MODE_MAX¶
-