LED PWM 控制器
概述
LED 控制器 (LEDC) 主要用于控制 LED,也可产生 PWM 信号用于其他设备的控制。 该控制器有 8 路通道,可以产生独立的波形来驱动 RGB LED 等设备。
LED PWM 控制器可在无需 CPU 干预的情况下自动改变占空比,实现亮度和颜色渐变。
功能概览
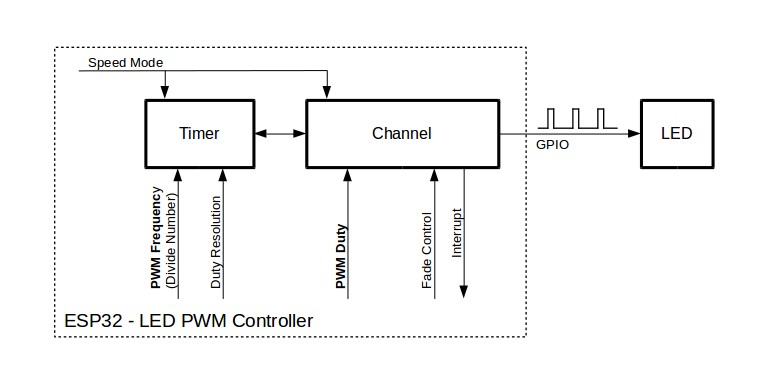
设置 LEDC 通道分三步完成。注意,与 ESP32 不同,ESP32-S3 仅支持设置通道为低速模式。
定时器配置 指定 PWM 信号的频率和占空比分辨率。
通道配置 绑定定时器和输出 PWM 信号的 GPIO。
改变 PWM 信号 输出 PWM 信号来驱动 LED。可通过软件控制或使用硬件渐变功能来改变 LED 的亮度。
另一个可选步骤是可以在渐变终端设置一个中断。
LED PWM 控制器 API 的关键配置
定时器配置
要设置定时器,可调用函数 ledc_timer_config(),并将包括如下配置参数的数据结构 ledc_timer_config_t 传递给该函数:
速度模式(值必须为
LEDC_LOW_SPEED_MODE)定时器索引
ledc_timer_tPWM 信号频率
PWM 占空比分辨率
频率和占空比分辨率相互关联。PWM 频率越高,占空比分辨率越低,反之亦然。如果 API 不是用来改变 LED 亮度,而是用于其它目的,这种相互关系可能会很重要。更多信息详见 频率和占空比分辨率支持范围 一节。
通道配置
定时器设置好后,请配置所需的通道(ledc_channel_t 之一)。配置通道需调用函数 ledc_channel_config()。
通道的配置与定时器设置类似,需向通道配置函数传递包括通道配置参数的结构体 ledc_channel_config_t 。
此时,通道会按照 ledc_channel_config_t 的配置开始运作,并在选定的 GPIO 上生成由定时器设置指定的频率和占空比的 PWM 信号。在通道运作过程中,可以随时通过调用函数 ledc_stop() 将其暂停。
改变 PWM 信号
通道开始运行、生成具有恒定占空比和频率的 PWM 信号之后,有几种方式可以改变该信号。驱动 LED 时,主要通过改变占空比来变化光线亮度。
以下两节介绍了如何使用软件和硬件改变占空比。如有需要,PWM 信号的频率也可更改,详见 改变 PWM 频率 一节。
使用软件改变 PWM 占空比
调用函数 ledc_set_duty() 可以设置新的占空比。之后,调用函数 ledc_update_duty() 使新配置生效。要查看当前设置的占空比,可使用 _get_ 函数 ledc_get_duty()。
另外一种设置占空比和其他通道参数的方式是调用 通道配置 一节提到的函数 ledc_channel_config()。
传递给函数的占空比数值范围取决于选定的 duty_resolution,应为 0 至 (2 ** duty_resolution) - 1。例如,如选定的占空比分辨率为 10,则占空比的数值范围为 0 至 1023。此时分辨率为 ~0.1%。
使用硬件改变 PWM 占空比
LED PWM 控制器硬件可逐渐改变占空比的数值。要使用此功能,需用函数 ledc_fade_func_install() 使能渐变,之后用下列可用渐变函数之一配置:
最后需要调用 ledc_fade_start() 开启渐变。渐变可以在阻塞或非阻塞模式下运行,具体区别请查看 ledc_fade_mode_t。需要特别注意的是,不管在哪种模式下,下一次渐变或单次占空比配置的指令生效都必须等到前一次渐变结束。
此外,在使能渐变后,每个通道都可以额外通过调用 ledc_cb_register() 注册一个回调函数用以获得渐变完成的事件通知。回调函数的原型被定义在 ledc_cb_t。每个回调函数都应当返回一个布尔值给驱动的中断处理函数,用以表示是否有高优先级任务被其唤醒。此外,值得注意的是,由于驱动的中断处理函数被放在了 IRAM 中, 回调函数和其调用的函数也需要被放在 IRAM 中。 ledc_cb_register() 会检查回调函数及函数上下文的指针地址是否在正确的存储区域。
如不需要渐变和渐变中断,可用函数 ledc_fade_func_uninstall() 关闭。
改变 PWM 频率
LED PWM 控制器 API 有多种方式即时改变 PWM 频率:
通过调用函数
ledc_set_freq()设置频率。可用函数ledc_get_freq()查看当前频率。通过调用函数
ledc_bind_channel_timer()将其他定时器绑定到该通道来改变频率和占空比分辨率。通过调用函数
ledc_channel_config()改变通道的定时器。
使用中断
配置 LED PWM 控制器通道时,可在 ledc_channel_config_t 中选取参数 ledc_intr_type_t ,在渐变完成时触发中断。
要注册处理程序来处理中断,可调用函数 ledc_isr_register()。
频率和占空比分辨率支持范围
LED PWM 控制器主要用于驱动 LED。该控制器 PWM 占空比设置的分辨率范围较广。比如,PWM 频率为 5 kHz 时,占空比分辨率最大可为 13 位。这意味着占空比可为 0 至 100% 之间的任意值,分辨率为 ~0.012%(2 ** 13 = 8192 LED 亮度的离散电平)。然而,这些参数取决于为 LED PWM 控制器定时器计时的时钟信号,LED PWM 控制器为通道提供时钟(具体可参考 定时器配置 和 ESP32-S3 技术参考手册 > LED PWM 计时器 (LEDC) [PDF])。
LED PWM 控制器可用于生成频率较高的信号,足以为数码相机模组等其他设备提供时钟。此时,最大频率可为 40 MHz,占空比分辨率为 1 位。也就是说,占空比固定为 50%,无法调整。
LED PWM 控制器 API 会在设定的频率和占空比分辨率超过 LED PWM 控制器硬件范围时报错。例如,试图将频率设置为 20 MHz、占空比分辨率设置为 3 位时,串行端口监视器上会报告如下错误:
E (196) ledc: requested frequency and duty resolution cannot be achieved, try reducing freq_hz or duty_resolution. div_param=128
此时,占空比分辨率或频率必须降低。比如,将占空比分辨率设置为 2 会解决这一问题,让占空比设置为 25% 的倍数,即 25%、50% 或 75%。
如设置的频率和占空比分辨率低于所支持的最低值,LED PWM 驱动器也会反映并报告,如:
E (196) ledc: requested frequency and duty resolution cannot be achieved, try increasing freq_hz or duty_resolution. div_param=128000000
占空比分辨率通常用 ledc_timer_bit_t 设置,范围是 10 至 15 位。如需较低的占空比分辨率(上至 10,下至 1),可直接输入相应数值。
应用实例
使用 LEDC 改变占空比和渐变控制的实例请参照 peripherals/ledc/ledc_fade。
使用 LEDC 基本实例请参照 peripherals/ledc/ledc_basic。
API 参考
Header File
Functions
-
esp_err_t ledc_channel_config(const ledc_channel_config_t *ledc_conf)
LEDC channel configuration Configure LEDC channel with the given channel/output gpio_num/interrupt/source timer/frequency(Hz)/LEDC duty resolution.
- 参数
ledc_conf – Pointer of LEDC channel configure struct
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
esp_err_t ledc_timer_config(const ledc_timer_config_t *timer_conf)
LEDC timer configuration Configure LEDC timer with the given source timer/frequency(Hz)/duty_resolution.
- 参数
timer_conf – Pointer of LEDC timer configure struct
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
ESP_FAIL Can not find a proper pre-divider number base on the given frequency and the current duty_resolution.
-
esp_err_t ledc_update_duty(ledc_mode_t speed_mode, ledc_channel_t channel)
LEDC update channel parameters.
备注
Call this function to activate the LEDC updated parameters. After ledc_set_duty, we need to call this function to update the settings. And the new LEDC parameters don’t take effect until the next PWM cycle.
备注
ledc_set_duty, ledc_set_duty_with_hpoint and ledc_update_duty are not thread-safe, do not call these functions to control one LEDC channel in different tasks at the same time. A thread-safe version of API is ledc_set_duty_and_update
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
esp_err_t ledc_set_pin(int gpio_num, ledc_mode_t speed_mode, ledc_channel_t ledc_channel)
Set LEDC output gpio.
- Deprecated:
This function is redundant, please use ledc_channel_config to set gpio pins.
- 参数
gpio_num – The LEDC output gpio
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
ledc_channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
esp_err_t ledc_stop(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t idle_level)
LEDC stop. Disable LEDC output, and set idle level.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
idle_level – Set output idle level after LEDC stops.
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
esp_err_t ledc_set_freq(ledc_mode_t speed_mode, ledc_timer_t timer_num, uint32_t freq_hz)
LEDC set channel frequency (Hz)
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_num – LEDC timer index (0-3), select from ledc_timer_t
freq_hz – Set the LEDC frequency
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
ESP_FAIL Can not find a proper pre-divider number base on the given frequency and the current duty_resolution.
-
uint32_t ledc_get_freq(ledc_mode_t speed_mode, ledc_timer_t timer_num)
LEDC get channel frequency (Hz)
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_num – LEDC timer index (0-3), select from ledc_timer_t
- 返回
0 error
Others Current LEDC frequency
-
esp_err_t ledc_set_duty_with_hpoint(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t duty, uint32_t hpoint)
LEDC set duty and hpoint value Only after calling ledc_update_duty will the duty update.
备注
ledc_set_duty, ledc_set_duty_with_hpoint and ledc_update_duty are not thread-safe, do not call these functions to control one LEDC channel in different tasks at the same time. A thread-safe version of API is ledc_set_duty_and_update
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
duty – Set the LEDC duty, the range of duty setting is [0, (2**duty_resolution) - 1]
hpoint – Set the LEDC hpoint value(max: 0xfffff)
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
int ledc_get_hpoint(ledc_mode_t speed_mode, ledc_channel_t channel)
LEDC get hpoint value, the counter value when the output is set high level.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
- 返回
LEDC_ERR_VAL if parameter error
Others Current hpoint value of LEDC channel
-
esp_err_t ledc_set_duty(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t duty)
LEDC set duty This function do not change the hpoint value of this channel. if needed, please call ledc_set_duty_with_hpoint. only after calling ledc_update_duty will the duty update.
备注
ledc_set_duty, ledc_set_duty_with_hpoint and ledc_update_duty are not thread-safe, do not call these functions to control one LEDC channel in different tasks at the same time. A thread-safe version of API is ledc_set_duty_and_update.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
duty – Set the LEDC duty, the range of duty setting is [0, (2**duty_resolution) - 1]
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
uint32_t ledc_get_duty(ledc_mode_t speed_mode, ledc_channel_t channel)
LEDC get duty This function returns the duty at the present PWM cycle. You shouldn’t expect the function to return the new duty in the same cycle of calling ledc_update_duty, because duty update doesn’t take effect until the next cycle.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
- 返回
LEDC_ERR_DUTY if parameter error
Others Current LEDC duty
-
esp_err_t ledc_set_fade(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t duty, ledc_duty_direction_t fade_direction, uint32_t step_num, uint32_t duty_cycle_num, uint32_t duty_scale)
LEDC set gradient Set LEDC gradient, After the function calls the ledc_update_duty function, the function can take effect.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
duty – Set the start of the gradient duty, the range of duty setting is [0, (2**duty_resolution) - 1]
fade_direction – Set the direction of the gradient
step_num – Set the number of the gradient
duty_cycle_num – Set how many LEDC tick each time the gradient lasts
duty_scale – Set gradient change amplitude
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Parameter error
-
esp_err_t ledc_isr_register(void (*fn)(void*), void *arg, int intr_alloc_flags, ledc_isr_handle_t *handle)
Register LEDC interrupt handler, the handler is an ISR. The handler will be attached to the same CPU core that this function is running on.
- 参数
fn – Interrupt handler function.
arg – User-supplied argument passed to the handler function.
intr_alloc_flags – Flags used to allocate the interrupt. One or multiple (ORred) ESP_INTR_FLAG_* values. See esp_intr_alloc.h for more info.
handle – Pointer to return handle. If non-NULL, a handle for the interrupt will be returned here.
- 返回
ESP_OK Success
ESP_ERR_INVALID_ARG Function pointer error.
-
esp_err_t ledc_timer_set(ledc_mode_t speed_mode, ledc_timer_t timer_sel, uint32_t clock_divider, uint32_t duty_resolution, ledc_clk_src_t clk_src)
Configure LEDC settings.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_sel – Timer index (0-3), there are 4 timers in LEDC module
clock_divider – Timer clock divide value, the timer clock is divided from the selected clock source
duty_resolution – Resolution of duty setting in number of bits. The range of duty values is [0, (2**duty_resolution)]
clk_src – Select LEDC source clock.
- 返回
(-1) Parameter error
Other Current LEDC duty
-
esp_err_t ledc_timer_rst(ledc_mode_t speed_mode, ledc_timer_t timer_sel)
Reset LEDC timer.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_sel – LEDC timer index (0-3), select from ledc_timer_t
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
-
esp_err_t ledc_timer_pause(ledc_mode_t speed_mode, ledc_timer_t timer_sel)
Pause LEDC timer counter.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_sel – LEDC timer index (0-3), select from ledc_timer_t
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
-
esp_err_t ledc_timer_resume(ledc_mode_t speed_mode, ledc_timer_t timer_sel)
Resume LEDC timer.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
timer_sel – LEDC timer index (0-3), select from ledc_timer_t
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
-
esp_err_t ledc_bind_channel_timer(ledc_mode_t speed_mode, ledc_channel_t channel, ledc_timer_t timer_sel)
Bind LEDC channel with the selected timer.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
timer_sel – LEDC timer index (0-3), select from ledc_timer_t
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
-
esp_err_t ledc_set_fade_with_step(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, uint32_t scale, uint32_t cycle_num)
Set LEDC fade function.
备注
Call ledc_fade_func_install() once before calling this function. Call ledc_fade_start() after this to start fading.
备注
ledc_set_fade_with_step, ledc_set_fade_with_time and ledc_fade_start are not thread-safe, do not call these functions to control one LEDC channel in different tasks at the same time. A thread-safe version of API is ledc_set_fade_step_and_start
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode. ,
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
target_duty – Target duty of fading [0, (2**duty_resolution) - 1]
scale – Controls the increase or decrease step scale.
cycle_num – increase or decrease the duty every cycle_num cycles
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_FAIL Fade function init error
-
esp_err_t ledc_set_fade_with_time(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, int max_fade_time_ms)
Set LEDC fade function, with a limited time.
备注
Call ledc_fade_func_install() once before calling this function. Call ledc_fade_start() after this to start fading.
备注
ledc_set_fade_with_step, ledc_set_fade_with_time and ledc_fade_start are not thread-safe, do not call these functions to control one LEDC channel in different tasks at the same time. A thread-safe version of API is ledc_set_fade_step_and_start
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode. ,
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
target_duty – Target duty of fading [0, (2**duty_resolution) - 1]
max_fade_time_ms – The maximum time of the fading ( ms ).
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_FAIL Fade function init error
-
esp_err_t ledc_fade_func_install(int intr_alloc_flags)
Install LEDC fade function. This function will occupy interrupt of LEDC module.
- 参数
intr_alloc_flags – Flags used to allocate the interrupt. One or multiple (ORred) ESP_INTR_FLAG_* values. See esp_intr_alloc.h for more info.
- 返回
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function already installed.
-
void ledc_fade_func_uninstall(void)
Uninstall LEDC fade function.
-
esp_err_t ledc_fade_start(ledc_mode_t speed_mode, ledc_channel_t channel, ledc_fade_mode_t fade_mode)
Start LEDC fading.
备注
Call ledc_fade_func_install() once before calling this function. Call this API right after ledc_set_fade_with_time or ledc_set_fade_with_step before to start fading.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel number
fade_mode – Whether to block until fading done. See ledc_types.h ledc_fade_mode_t for more info. Note that this function will not return until fading to the target duty if LEDC_FADE_WAIT_DONE mode is selected.
- 返回
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_ERR_INVALID_ARG Parameter error.
-
esp_err_t ledc_set_duty_and_update(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t duty, uint32_t hpoint)
A thread-safe API to set duty for LEDC channel and return when duty updated.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
duty – Set the LEDC duty, the range of duty setting is [0, (2**duty_resolution) - 1]
hpoint – Set the LEDC hpoint value(max: 0xfffff)
-
esp_err_t ledc_set_fade_time_and_start(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, uint32_t max_fade_time_ms, ledc_fade_mode_t fade_mode)
A thread-safe API to set and start LEDC fade function, with a limited time.
备注
Call ledc_fade_func_install() once, before calling this function.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
target_duty – Target duty of fading [0, (2**duty_resolution) - 1]
max_fade_time_ms – The maximum time of the fading ( ms ).
fade_mode – choose blocking or non-blocking mode
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_FAIL Fade function init error
-
esp_err_t ledc_set_fade_step_and_start(ledc_mode_t speed_mode, ledc_channel_t channel, uint32_t target_duty, uint32_t scale, uint32_t cycle_num, ledc_fade_mode_t fade_mode)
A thread-safe API to set and start LEDC fade function.
备注
Call ledc_fade_func_install() once before calling this function.
备注
If a fade operation is running in progress on that channel, the driver would not allow it to be stopped. Other duty operations will have to wait until the fade operation has finished.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
target_duty – Target duty of fading [0, (2**duty_resolution) - 1]
scale – Controls the increase or decrease step scale.
cycle_num – increase or decrease the duty every cycle_num cycles
fade_mode – choose blocking or non-blocking mode
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_FAIL Fade function init error
-
esp_err_t ledc_cb_register(ledc_mode_t speed_mode, ledc_channel_t channel, ledc_cbs_t *cbs, void *user_arg)
LEDC callback registration function.
备注
The callback is called from an ISR, it must never attempt to block, and any FreeRTOS API called must be ISR capable.
- 参数
speed_mode – Select the LEDC channel group with specified speed mode. Note that not all targets support high speed mode.
channel – LEDC channel index (0 - LEDC_CHANNEL_MAX-1), select from ledc_channel_t
cbs – Group of LEDC callback functions
user_arg – user registered data for the callback function
- 返回
ESP_ERR_INVALID_ARG Parameter error
ESP_OK Success
ESP_ERR_INVALID_STATE Fade function not installed.
ESP_FAIL Fade function init error
Structures
-
struct ledc_channel_config_t
Configuration parameters of LEDC channel for ledc_channel_config function.
Public Members
-
int gpio_num
the LEDC output gpio_num, if you want to use gpio16, gpio_num = 16
-
ledc_mode_t speed_mode
LEDC speed speed_mode, high-speed mode or low-speed mode
-
ledc_channel_t channel
LEDC channel (0 - 7)
-
ledc_intr_type_t intr_type
configure interrupt, Fade interrupt enable or Fade interrupt disable
-
ledc_timer_t timer_sel
Select the timer source of channel (0 - 3)
-
uint32_t duty
LEDC channel duty, the range of duty setting is [0, (2**duty_resolution)]
-
int hpoint
LEDC channel hpoint value, the max value is 0xfffff
-
unsigned int output_invert
Enable (1) or disable (0) gpio output invert
-
struct ledc_channel_config_t::[anonymous] flags
LEDC flags
-
int gpio_num
-
struct ledc_timer_config_t
Configuration parameters of LEDC Timer timer for ledc_timer_config function.
Public Members
-
ledc_mode_t speed_mode
LEDC speed speed_mode, high-speed mode or low-speed mode
-
ledc_timer_bit_t duty_resolution
LEDC channel duty resolution
-
ledc_timer_bit_t bit_num
Deprecated in ESP-IDF 3.0. This is an alias to ‘duty_resolution’ for backward compatibility with ESP-IDF 2.1
-
ledc_timer_t timer_num
The timer source of channel (0 - 3)
-
uint32_t freq_hz
LEDC timer frequency (Hz)
-
ledc_clk_cfg_t clk_cfg
Configure LEDC source clock. For low speed channels and high speed channels, you can specify the source clock using LEDC_USE_REF_TICK, LEDC_USE_APB_CLK or LEDC_AUTO_CLK. For low speed channels, you can also specify the source clock using LEDC_USE_RTC8M_CLK, in this case, all low speed channel’s source clock must be RTC8M_CLK
-
ledc_mode_t speed_mode
-
struct ledc_cb_param_t
LEDC callback parameter.
Public Members
-
ledc_cb_event_t event
Event name
-
uint32_t speed_mode
Speed mode of the LEDC channel group
-
uint32_t channel
LEDC channel (0 - LEDC_CHANNEL_MAX-1)
-
uint32_t duty
LEDC current duty of the channel, the range of duty is [0, (2**duty_resolution) - 1]
-
ledc_cb_event_t event
-
struct ledc_cbs_t
Group of supported LEDC callbacks.
备注
The callbacks are all running under ISR environment
Type Definitions
-
typedef intr_handle_t ledc_isr_handle_t
-
typedef bool (*ledc_cb_t)(const ledc_cb_param_t *param, void *user_arg)
Type of LEDC event callback.
- Param param
LEDC callback parameter
- Param user_arg
User registered data
- Return
Whether a high priority task has been waken up by this function
Enumerations
Header File
Enumerations
-
enum ledc_mode_t
Values:
-
enumerator LEDC_LOW_SPEED_MODE
LEDC low speed speed_mode
-
enumerator LEDC_SPEED_MODE_MAX
LEDC speed limit
-
enumerator LEDC_LOW_SPEED_MODE
-
enum ledc_intr_type_t
Values:
-
enumerator LEDC_INTR_DISABLE
Disable LEDC interrupt
-
enumerator LEDC_INTR_FADE_END
Enable LEDC interrupt
-
enumerator LEDC_INTR_MAX
-
enumerator LEDC_INTR_DISABLE
-
enum ledc_duty_direction_t
Values:
-
enumerator LEDC_DUTY_DIR_DECREASE
LEDC duty decrease direction
-
enumerator LEDC_DUTY_DIR_INCREASE
LEDC duty increase direction
-
enumerator LEDC_DUTY_DIR_MAX
-
enumerator LEDC_DUTY_DIR_DECREASE
-
enum ledc_slow_clk_sel_t
Values:
-
enumerator LEDC_SLOW_CLK_RTC8M
LEDC low speed timer clock source is 8MHz RTC clock
-
enumerator LEDC_SLOW_CLK_APB
LEDC low speed timer clock source is 80MHz APB clock
-
enumerator LEDC_SLOW_CLK_XTAL
LEDC low speed timer clock source XTAL clock
-
enumerator LEDC_SLOW_CLK_RTC8M
-
enum ledc_clk_cfg_t
In theory, the following enumeration shall be placed in LEDC driver’s header. However, as the next enumeration,
ledc_clk_src_t, makes the use of some of these values and to avoid mutual inclusion of the headers, we must define it here.Values:
-
enumerator LEDC_AUTO_CLK
The driver will automatically select the source clock(REF_TICK or APB) based on the giving resolution and duty parameter when init the timer
-
enumerator LEDC_USE_APB_CLK
LEDC timer select APB clock as source clock
-
enumerator LEDC_USE_RTC8M_CLK
LEDC timer select RTC8M_CLK as source clock. Only for low speed channels and this parameter must be the same for all low speed channels
-
enumerator LEDC_USE_REF_TICK
LEDC timer select REF_TICK clock as source clock
-
enumerator LEDC_USE_XTAL_CLK
LEDC timer select XTAL clock as source clock
-
enumerator LEDC_AUTO_CLK
-
enum ledc_clk_src_t
Values:
-
enumerator LEDC_REF_TICK
LEDC timer clock divided from reference tick (1Mhz)
-
enumerator LEDC_APB_CLK
LEDC timer clock divided from APB clock (80Mhz)
-
enumerator LEDC_SCLK
Selecting this value for LEDC_TICK_SEL_TIMER let the hardware take its source clock from LEDC_APB_CLK_SEL
-
enumerator LEDC_REF_TICK
-
enum ledc_timer_t
Values:
-
enumerator LEDC_TIMER_0
LEDC timer 0
-
enumerator LEDC_TIMER_1
LEDC timer 1
-
enumerator LEDC_TIMER_2
LEDC timer 2
-
enumerator LEDC_TIMER_3
LEDC timer 3
-
enumerator LEDC_TIMER_MAX
-
enumerator LEDC_TIMER_0
-
enum ledc_channel_t
Values:
-
enumerator LEDC_CHANNEL_0
LEDC channel 0
-
enumerator LEDC_CHANNEL_1
LEDC channel 1
-
enumerator LEDC_CHANNEL_2
LEDC channel 2
-
enumerator LEDC_CHANNEL_3
LEDC channel 3
-
enumerator LEDC_CHANNEL_4
LEDC channel 4
-
enumerator LEDC_CHANNEL_5
LEDC channel 5
-
enumerator LEDC_CHANNEL_6
LEDC channel 6
-
enumerator LEDC_CHANNEL_7
LEDC channel 7
-
enumerator LEDC_CHANNEL_MAX
-
enumerator LEDC_CHANNEL_0
-
enum ledc_timer_bit_t
Values:
-
enumerator LEDC_TIMER_1_BIT
LEDC PWM duty resolution of 1 bits
-
enumerator LEDC_TIMER_2_BIT
LEDC PWM duty resolution of 2 bits
-
enumerator LEDC_TIMER_3_BIT
LEDC PWM duty resolution of 3 bits
-
enumerator LEDC_TIMER_4_BIT
LEDC PWM duty resolution of 4 bits
-
enumerator LEDC_TIMER_5_BIT
LEDC PWM duty resolution of 5 bits
-
enumerator LEDC_TIMER_6_BIT
LEDC PWM duty resolution of 6 bits
-
enumerator LEDC_TIMER_7_BIT
LEDC PWM duty resolution of 7 bits
-
enumerator LEDC_TIMER_8_BIT
LEDC PWM duty resolution of 8 bits
-
enumerator LEDC_TIMER_9_BIT
LEDC PWM duty resolution of 9 bits
-
enumerator LEDC_TIMER_10_BIT
LEDC PWM duty resolution of 10 bits
-
enumerator LEDC_TIMER_11_BIT
LEDC PWM duty resolution of 11 bits
-
enumerator LEDC_TIMER_12_BIT
LEDC PWM duty resolution of 12 bits
-
enumerator LEDC_TIMER_13_BIT
LEDC PWM duty resolution of 13 bits
-
enumerator LEDC_TIMER_14_BIT
LEDC PWM duty resolution of 14 bits
-
enumerator LEDC_TIMER_BIT_MAX
-
enumerator LEDC_TIMER_1_BIT