无刷电机控制概述
本指南包含以下内容:
无刷电机概述
无刷直流(Brushless Direct Current, BLDC)电机属于同步电机的一种,可配置为单相,两相,三相。此文讨论的都是三相无刷电机。
无刷电机不使用电刷进行换向,而是使用电子换向,具有以下优点:
更好的转速-转矩特性
快速的动态响应
高效率
使用寿命长
运转无噪音
较高的转速范围

无刷电机
无刷电机的组成分为定子和转子两部分:
定子是线圈绕组电枢,具有三个星型连接的定子绕组,沿着定子圆周分布这些绕组,以构成均匀分布的磁极。
转子用永磁体制成,永磁体的磁极数目大多为 2 到 8 磁极。南磁极和北磁极交替。
如果只给电机通固定的直流电流,电机只会产生不变的磁场。无法转动起来。只有通过适当的顺序来为定子相位供电,在定子上产生一个旋转磁场。转子的固有磁极跟随定子的旋转磁场有序旋转,才能达到转动的目的。
备注
理想状态下,转矩峰值出现在两个磁场正交时候,而在两磁场平行时最弱。
重要参数:
KV 值:可以直观表示无刷电机在具体工作电压下的具体转速。
转矩:电机中转子产生的可以用来带动机械负载的驱动力矩。
转速:电机每分钟的转速
最大电流:可以承受并安全工作的最大电流
极对数 Pp:转子上磁钢的数量除以 2,可以通过给任意两相通过小电压,手动旋转电机一周,感受阻力的次数就是极对数。如感到 6 次阻力,极对数就是 6。
相电感 LS:电机静止时的定子绕组两端的电感为 LL, 相电感为其一半
相电阻 RS:万用表测电机两项电阻 RL,相电阻为其一半
驱动方式
无刷电机一般通过 6 MOS 管组成的逆变电路进行驱动,通过上臂和下臂开关器件的组合,可以在定子上产生一个旋转磁场。

通过图上的逆变电路,按照顺序依次导通,转子磁铁就能循环转动,每经过 6 次切换电流,转子转动一圈。这里展示的是导通两个桥臂的方式。
备注
上下桥臂不能同时导通,否则会短路,所以我们需要引入死区控制,来规避掉同一相的上下桥臂同时导通的情况。
导通上臂 |
导通下臂 |
相电流 A |
相电流 B |
相电流 C |
|---|---|---|---|---|
UH |
WL |
DC+ |
悬空 |
DC- |
UH |
VL |
DC+ |
DC- |
悬空 |
WH |
VL |
悬空 |
DC- |
DC+ |
WH |
UL |
DC- |
悬空 |
DC+ |
VH |
UL |
DC- |
DC+ |
悬空 |
VH |
WL |
悬空 |
DC+ |
DC- |
为了让电机旋转的速度可控,我们可以让施加在上臂的控制信号为 PWM 信号,通过控制 PWM 的占空比来达到控制转速的作用。
控制方式
在实际的电机控制中,我们并不能准确的知道电机的位置,所以我们需要能过获取到电机的实时位置,并计算出下一步导通的桥臂,这样才能让电机旋转起来。
获取转子位置一般有两种方式,有感霍尔和无感检测。
有感霍尔
在无刷电机中,一般用 3 个开关型霍尔器件检测转子位置,安装位置一般相隔 120°。如下图所示
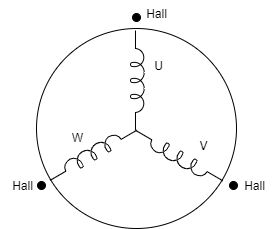
当 N 极靠近霍尔 a 时,a 输出高电平 1,当 N 极原理 a 时,a 输出低电平。其他同理。那么当转子转动一圈,会产生下面的波形。
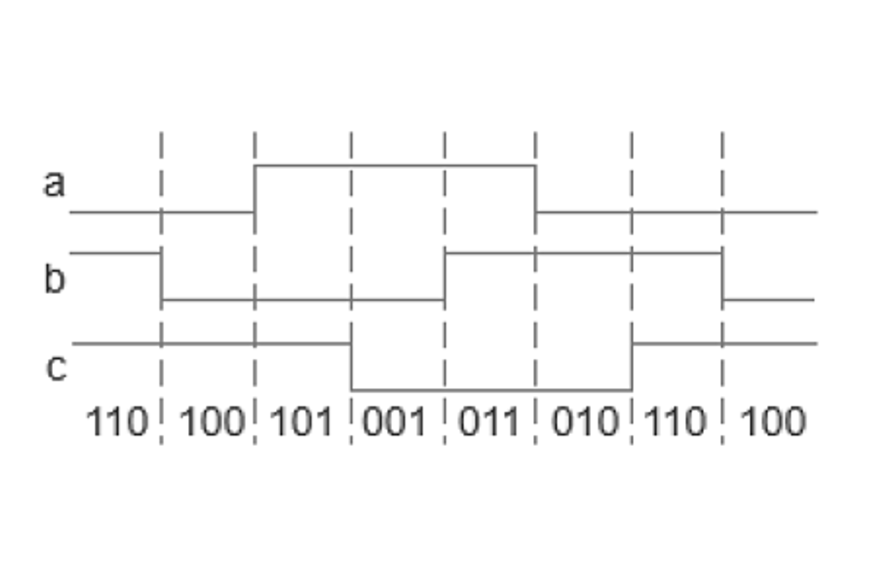
这样我们就能通过霍尔传感器的输出,确定转子的当前位置。并使用“二二导通”法让电机旋转起来
无感检测
在一些小、微电机系统中,安装位置传感器对电机的体积和成本有不利影响。因此无传感器的位置检测也非常重要。当转子磁铁在转动时,每个绕组都会产生反电动势,而观测反电动势的变化,确认转子位置就是无感检测中的一种。
反电动势
反电动势根据楞次定律,方向与提供绕组的主电压相反。反电动势的极性与励磁电压相反。反电动势主要取决于三个方向。
转子角速度
转子磁铁产生的磁场
定子绕组的匝数
对于电机来说,转子磁场和定子绕组的匝数都是固定的,那么在实际运转中,唯一决定反电动势的因素就是角速度,或者说转子转速。在每次换向时,都有一个绕组得正电,第二个得负电,第三个保持开路状态。
通过检测各相绕组的反电动势过零点,就能在一个电周期内得到转子的六个位置。非导通想反电动势过零点延迟 30° 电角度就是换线点。
备注
在电机转速极慢的时候,反电动势的幅值很低,很难检测到过零点。
基于反电动势检测过零点有两种方式
基于 ADC 采样的无感方波电机控制 ADC 采样检测过零点
基于比较器检测的无感方波电机控制 比较器检测过零点
此外还有基于相电流采集的无感 FOC 方案
双电阻无感 FOC 方案(待更新)