通用硬件定时器 (GPTimer)
本文介绍了 ESP-IDF 中的通用硬件定时器驱动的功能,章节目录如下:
概述
通用定时器是 ESP32-C3 [定时器组外设]的专用驱动程序。该定时器可以选择不同的时钟源和分频系数,能满足纳秒级的分辨率要求。此外,它还具有灵活的超时报警功能,并允许在报警时刻自动更新计数值,从而实现非常精准的定时周期。
基于硬件定时器的 高分辨率、高计数范围和高响应 的能力,该驱动的主要应用场景包括:
作为自由运行的挂历时钟,给其他模块提供时间戳服务
产生周期性警报,完成周期性任务
产生一次性警报,配合警报值的异步更新,可实现单调型的软件定时器链表
配合 GPIO 模块,可以实现 PWM 信号输出和输入捕获
其他
快速入门
本节将带你快速了解如何使用 GPTimer 驱动。通过简单的示例,展示如何创建一个定时器并启动它,如何设置警报事件,以及如何注册事件回调函数。一般的使用流程如下:
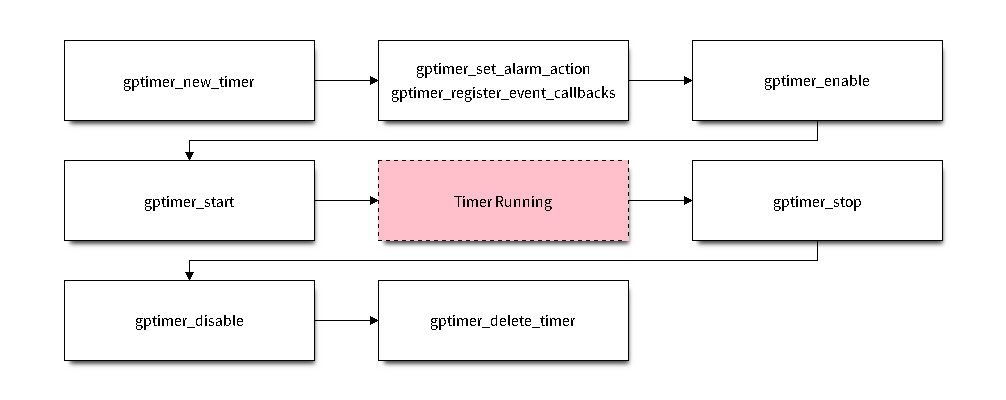
GPTimer 驱动的一般使用流程(点击图片查看大图)
创建和启动定时器
首先,我们需要创建一个定时器实例。以下代码展示了如何创建一个分辨率为 1 MHz 的定时器:
gptimer_handle_t gptimer = NULL;
gptimer_config_t timer_config = {
.clk_src = GPTIMER_CLK_SRC_DEFAULT, // 选择默认的时钟源
.direction = GPTIMER_COUNT_UP, // 计数方向为向上计数
.resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz,即 1 次滴答为 1 微秒
};
// 创建定时器实例
ESP_ERROR_CHECK(gptimer_new_timer(&timer_config, &gptimer));
// 使能定时器
ESP_ERROR_CHECK(gptimer_enable(gptimer));
// 启动定时器
ESP_ERROR_CHECK(gptimer_start(gptimer));
当创建定时器实例时,我们需要通过 gptimer_config_t 配置时钟源、计数方向和分辨率等参数。这些参数将决定定时器的工作方式。然后调用 gptimer_new_timer() 函数创建一个新的定时器实例,该函数将返回一个指向新实例的句柄。定时器的句柄实际上是一个指向定时器内存对象的指针,类型为 gptimer_handle_t。
以下是 gptimer_config_t 结构体的其他配置参数及其解释:
gptimer_config_t::clk_src选择定时器的时钟源。可用时钟源列在gptimer_clock_source_t中,只能选择其中一个。不同的时钟源会在分辨率,精度和功耗上有所不同。gptimer_config_t::direction设置定时器的计数方向。支持的方向列在gptimer_count_direction_t中,只能选择其中一个。gptimer_config_t::resolution_hz设置内部计数器的分辨率。计数器每滴答一次相当于 1 / resolution_hz 秒。gptimer_config_t::intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。gptimer_config_t::flags通常用来微调驱动的一些行为,包括以下选项:gptimer_config_t::flags::allow_pd配置驱动程序是否允许系统在睡眠模式下关闭外设电源。在进入睡眠之前,系统将备份 GPTimer 寄存器上下文,当系统从睡眠唤醒时时,这些上下文将被恢复。请注意,关闭外设可以节省功耗,但会消耗更多内存来保存寄存器上下文。你需要在功耗和内存消耗之间做权衡。此配置选项依赖于特定的硬件功能,如果在不支持的芯片上启用它,你将看到类似not able to power down in light sleep的错误消息。
备注
请注意,如果当前芯片中所有的硬件定时器都已经被申请使用,那么 gptimer_new_timer() 将返回 ESP_ERR_NOT_FOUND 错误。
定时器在启动前必须要先使能,使能函数 gptimer_enable() 可以将驱动的内部状态机切换到激活状态,这里面还会包括一些系统性服务的申请/注册等工作,如申请电源管理锁。与使能函数相对应的是禁用函数 gptimer_disable(),它会释放所有的系统性服务。
备注
调用 gptimer_enable() 和 gptimer_disable() 函数时,需要成对使用。这意味着,你不能连续调用两次 gptimer_enable() 或 gptimer_disable() 函数。这种成对调用的原则确保了资源的正确管理和释放。
gptimer_start() 函数用于启动定时器。启动后,定时器将开始计数,并在计数到达最大值或者最小值时(取决于计数方向)自动溢出,从0开始重新计数。
gptimer_stop() 函数用于停止定时器。请注意,停止一个定时器并不会将计数器当前的值清零。如果想清零计数器,需要使用后面介绍的函数 gptimer_set_raw_count()。
gptimer_start() 和 gptimer_stop() 函数遵循幂等原则。这意味着,如果定时器已经启动,再次调用 gptimer_start() 函数不会产生任何效果。同样,如果定时器已经停止,再次调用 gptimer_stop() 函数也不会产生任何效果。
备注
但是请注意,当定时器处于启动的 中间状态 时(启动开始了,但还没有启动完毕),此时如果另外一个线程调用 gptimer_start() 或者 gptimer_stop() 函数,则会返回 ESP_ERR_INVALID_STATE 错误,避免触发不确定的行为。
设置和获取计数值
一个刚创建的定时器,其内部计数器值默认为 0。你可以通过 gptimer_set_raw_count() 设置其他的计数值。最大计数值取决于硬件定时器的位宽(通常不少于 54 bit)。
备注
如果定时器已经处于启动状态,gptimer_set_raw_count() 会让定时器立即跳到新值处开始计数。
gptimer_get_raw_count() 函数用于获取定时器的当前计数值。这个计数值是定时器从启动以来所累积的计数(假设是从 0 开始启动的话),请注意,返回的数值还没有经过任何单位转换,是一个纯粹的计数值。你需要根据定时器的实际分辨率来把计数值转换成时间单位。定时器的分辨率可以通过 gptimer_get_resolution() 函数来获取。
// 查看定时器的分辨率
uint32_t resolution_hz;
ESP_ERROR_CHECK(gptimer_get_resolution(gptimer, &resolution_hz));
// 读取当前计数值
uint64_t count;
ESP_ERROR_CHECK(gptimer_get_raw_count(gptimer, &count));
// (可选的)将计数值转换成时间单位 (秒)
double time = (double)count / resolution_hz;
触发周期性警报事件
除了时间戳功能以外,通用定时器还支持警报功能。以下代码展示了如何设置一个周期性警报,每秒触发一次:
gptimer_handle_t gptimer = NULL;
gptimer_config_t timer_config = {
.clk_src = GPTIMER_CLK_SRC_DEFAULT, // 选择默认的时钟源
.direction = GPTIMER_COUNT_UP, // 计数方向为向上计数
.resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz,即 1 次滴答为 1 微秒
};
// 创建定时器实例
ESP_ERROR_CHECK(gptimer_new_timer(&timer_config, &gptimer));
static bool example_timer_on_alarm_cb(gptimer_handle_t timer, const gptimer_alarm_event_data_t *edata, void *user_ctx)
{
// 处理事件回调的一般流程:
// 1. 从 user_ctx 中拿到用户上下文数据(需事先从 gptimer_register_event_callbacks 中传入)
// 2. 从 edata 中获取警报事件数据,比如 edata->count_value
// 3. 执行用户自定义操作
// 4. 返回上述操作期间是否有高优先级的任务被唤醒了,以便通知调度器做切换任务
return false;
}
gptimer_alarm_config_t alarm_config = {
.reload_count = 0, // 当警报事件发生时,定时器会自动重载到 0
.alarm_count = 1000000, // 设置实际的警报周期,因为分辨率是 1us,所以 1000000 代表 1s
.flags.auto_reload_on_alarm = true, // 使能自动重载功能
};
// 设置定时器的警报动作
ESP_ERROR_CHECK(gptimer_set_alarm_action(gptimer, &alarm_config));
gptimer_event_callbacks_t cbs = {
.on_alarm = example_timer_on_alarm_cb, // 当警报事件发生时,调用用户回调函数
};
// 注册定时器事件回调函数,允许携带用户上下文
ESP_ERROR_CHECK(gptimer_register_event_callbacks(gptimer, &cbs, NULL));
// 使能定时器
ESP_ERROR_CHECK(gptimer_enable(gptimer));
// 启动定时器
ESP_ERROR_CHECK(gptimer_start(gptimer));
gptimer_set_alarm_action() 函数用于配置定时器的警报动作。当定时器计数值达到指定的警报值时,将发出警报事件。用户可以选择在警报事件发生时自动重载预设的计数值,从而实现周期性警报。
以下是 gptimer_alarm_config_t 结构体中的每个必要成员项的作用,通过配置这些参数,用户可以灵活地控制定时器的警报行为,以满足不同的应用需求。
gptimer_alarm_config_t::alarm_count设置触发警报事件的目标计数值。当定时器计数值达到该值时,将触发警报事件。设置警报值的时候也需要考虑定时器的计数方向,如果当前计数值已经 越过 了警报值,那么警报事件会立刻触发。gptimer_alarm_config_t::reload_count设置警报事件发生时要自动重载的计数值。此配置仅在gptimer_alarm_config_t::flags::auto_reload_on_alarm标志为true时生效。实际的警报周期将会由|alarm_count - reload_count|决定。从实际应用触发,不建议将警报周期设置成小于 5us。
备注
特别地, gptimer_set_alarm_action(gptimer, NULL); 表示关闭定时器的警报功能。
gptimer_register_event_callbacks() 函数用于注册定时器事件的回调函数。当定时器触发特定事件(如警报事件)时,将调用用户定义的回调函数。用户可以在回调函数中执行自定义操作,例如发送信号,从而实现更灵活的事件处理机制。由于回调函数是在中断上下文中执行的,因此在回调函数中应该避免执行复杂的操作(包括任何可能导致阻塞的操作),以免影响系统的实时性。gptimer_register_event_callbacks() 还允许用户传递一个上下文指针,以便在回调函数中访问用户定义的数据。
GPTimer 支持的事件回调函数有下面这些:
gptimer_alarm_cb_t警报事件回调函数,它有一个配套的数据结构gptimer_alarm_event_data_t,用于传递警报事件的相关数据: -gptimer_alarm_event_data_t::alarm_value保存的是警报值,即触发警报事件的目标计数值。 -gptimer_alarm_event_data_t::count_value保存的是警报发生后,进入中断处理器时的计数值。该值会不同于警报值,因为中断处理器会带来一定的延迟,并且计数值在警报发生时可能已经被自动重载了。
备注
请务必在调用 gptimer_enable() 之前注册回调函数,否则定时器事件将无法正确触发中断服务。
触发一次性警报事件
还有一些应用场景只需要触发一次警报中断,以下代码展示了如何设置一个一次性警报,在 1 秒后触发:
gptimer_handle_t gptimer = NULL;
gptimer_config_t timer_config = {
.clk_src = GPTIMER_CLK_SRC_DEFAULT, // 选择默认的时钟源
.direction = GPTIMER_COUNT_UP, // 计数方向为向上计数
.resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz,即 1 次滴答为 1 微秒
};
// 创建定时器实例
ESP_ERROR_CHECK(gptimer_new_timer(&timer_config, &gptimer));
static bool example_timer_on_alarm_cb(gptimer_handle_t timer, const gptimer_alarm_event_data_t *edata, void *user_ctx)
{
// 这里只是演示如何在警报第一次发生时让定时器停止工作
gptimer_stop(timer);
// 处理事件回调的一般流程:
// 1. 从 user_ctx 中拿到用户上下文数据(需事先从 gptimer_register_event_callbacks 中传入)
// 2. 从 edata 中获取警报事件数据,比如 edata->count_value
// 3. 执行用户自定义操作
// 4. 返回上述操作期间是否有高优先级的任务被唤醒了,以便通知调度器做切换任务
return false;
}
gptimer_alarm_config_t alarm_config = {
.alarm_count = 1000000, // 设置实际的警报周期,因为分辨率是 1us,所以 1000000 代表 1s
.flags.auto_reload_on_alarm = false; // 关闭自动重载功能
};
// 设置定时器的警报动作
ESP_ERROR_CHECK(gptimer_set_alarm_action(gptimer, &alarm_config));
gptimer_event_callbacks_t cbs = {
.on_alarm = example_timer_on_alarm_cb, // 当警报事件发生时,调用用户回调函数
};
// 注册定时器事件回调函数,允许携带用户上下文
ESP_ERROR_CHECK(gptimer_register_event_callbacks(gptimer, &cbs, NULL));
// 使能定时器
ESP_ERROR_CHECK(gptimer_enable(gptimer));
// 启动定时器
ESP_ERROR_CHECK(gptimer_start(gptimer));
与周期性警报不同,上述代码在配置警报行为时关闭了自动重载功能。这意味着,当警报事件发生后,定时器将不会自动重载到预设的计数值,而是继续计数直到溢出。如果希望定时器在警报后立即停止,可以在回调函数中调用 gptimer_stop()。
资源回收
当不再需要使用定时器时,应该调用 gptimer_delete_timer() 函数来释放软硬件资源。删除前请确保定时器已经处于停止状态。
进阶功能
在了解了基本用法后,我们可以进一步探索 GPTimer 驱动的更多玩法。
动态更新警报值
GPTimer 驱动支持在中断回调函数中调用 gptimer_set_alarm_action() 函数来动态更新警报值,从而实现单调型的软件定时器链表。以下代码展示了如何在警报事件发生时,重新设置下一次警报的触发时间:
gptimer_handle_t gptimer = NULL;
gptimer_config_t timer_config = {
.clk_src = GPTIMER_CLK_SRC_DEFAULT, // 选择默认的时钟源
.direction = GPTIMER_COUNT_UP, // 计数方向为向上计数
.resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz,即 1 次滴答为 1 微秒
};
// 创建定时器实例
ESP_ERROR_CHECK(gptimer_new_timer(&timer_config, &gptimer));
static bool example_timer_on_alarm_cb(gptimer_handle_t timer, const gptimer_alarm_event_data_t *edata, void *user_ctx)
{
gptimer_alarm_config_t alarm_config = {
.alarm_count = edata->alarm_value + 1000000, // 下一次警报在当前警报的基础上加 1s
};
// 更新警报值
gptimer_set_alarm_action(timer, &alarm_config);
return false;
}
gptimer_alarm_config_t alarm_config = {
.alarm_count = 1000000, // 设置实际的警报周期,因为分辨率是 1us,所以 1000000 代表 1s
.flags.auto_reload_on_alarm = false; // 关闭自动重载功能
};
// 设置定时器的警报动作
ESP_ERROR_CHECK(gptimer_set_alarm_action(gptimer, &alarm_config));
gptimer_event_callbacks_t cbs = {
.on_alarm = example_timer_on_alarm_cb, // 当警报事件发生时,调用用户回调函数
};
// 注册定时器事件回调函数,允许携带用户上下文
ESP_ERROR_CHECK(gptimer_register_event_callbacks(gptimer, &cbs, NULL));
// 使能定时器
ESP_ERROR_CHECK(gptimer_enable(gptimer));
// 启动定时器
ESP_ERROR_CHECK(gptimer_start(gptimer));
关于低功耗
当启用电源管理 CONFIG_PM_ENABLE 时,系统在进入睡眠模式前可能会调整或禁用时钟源,从而导致 GPTimer 的计时出错。
为了防止这种情况发生, GPTimer 驱动内部创建了一个电源管理锁。当调用 gptimer_enable() 函数后,该锁将被激活,确保系统不会进入睡眠模式,从而保持定时器的正确工作。如果需要降低功耗,可以调用 gptimer_disable() 函数来释放电源管理锁,使系统能够进入睡眠模式。但是,这样做会导致定时器停止计数,因此在唤醒后需要重新启动定时器。
关于线程安全
驱动使用了临界区保证了对寄存器的原子操作。句柄内部的关键成员也受临界区保护。驱动内部的状态机使用了原子指令保证了线程安全,通过状态检查还能进一步防止一些不合法的并发操作(例如 start 和 stop 冲突)。因此, GPTimer 驱动的 API 可以在多线程环境下使用,无需自行加锁。
同时,以下这些函数还允许在中断上下文中使用:
关于 Cache 安全
在文件系统进行 Flash 读写操作时,为了避免 Cache 从 Flash 加载指令和数据时出现错误,系统会暂时禁用 Cache 功能。这会导致 GPTimer 的中断处理程序在此期间无法响应,从而使用户的回调函数无法及时执行。如果希望在 Cache 被禁用期间,中断处理程序仍能正常运行,可以启用 CONFIG_GPTIMER_ISR_CACHE_SAFE 选项。
备注
请注意,在启用该选项后,所有的中断回调函数及其上下文数据 必须存放在内部存储空间 中。因为在 Cache 被禁用时,系统无法从 Flash 中加载数据和指令。
关于性能
为了提升中断处理的实时响应能力, GPTimer 驱动提供了 CONFIG_GPTIMER_ISR_HANDLER_IN_IRAM 选项。启用该选项后,中断处理程序将被放置在内部 RAM 中运行,从而减少了从 Flash 加载指令时可能出现的缓存丢失带来的延迟。
备注
但是,中断处理程序调用的用户回调函数和用户上下文数据仍然可能位于 Flash 中,缓存缺失的问题还是会存在,这需要用户自己将回调函数和数据放入内部 RAM 中,比如使用 IRAM_ATTR 和 DRAM_ATTR。
前文还提到, GPTimer 驱动允许部分函数在中断上下文中使用。CONFIG_GPTIMER_CTRL_FUNC_IN_IRAM 选项可以将这些函数放入 IRAM 中,一来,可以避免缓存缺失带来的性能损失,二来,这些函数在 Cache 关闭期间也能使用。
其他 Kconfig 选项
CONFIG_GPTIMER_ENABLE_DEBUG_LOG 选项允许强制启用 GPTimer 驱动的所有调试日志,无论全局日志级别设置如何。启用此选项可以帮助开发人员在调试过程中获取更详细的日志信息,从而更容易定位和解决问题。
关于资源消耗
使用 IDF Size 工具可以查看 GPTimer 驱动的代码和数据消耗。以下是测试前提条件(以 ESP32-C2 为例):
编译器优化等级设置为
-Os,以确保代码尺寸最小化。默认日志等级设置为
ESP_LOG_INFO,以平衡调试信息和性能。- 关闭以下驱动优化选项:
CONFIG_GPTIMER_ISR_HANDLER_IN_IRAM - 中断处理程序不放入 IRAM。
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAM - 控制函数不放入 IRAM。
CONFIG_GPTIMER_ISR_CACHE_SAFE - 不启用 Cache 安全选项。
注意,以下数据不是精确值,仅供参考,在不同型号的芯片上,数据会有所出入。
Component Layer |
Total Size |
DIRAM |
.bss |
.data |
.text |
Flash Code |
.text |
Flash Data |
.rodata |
|---|---|---|---|---|---|---|---|---|---|
soc |
8 |
0 |
0 |
0 |
0 |
0 |
0 |
8 |
8 |
hal |
206 |
0 |
0 |
0 |
0 |
206 |
206 |
0 |
0 |
driver |
4251 |
12 |
12 |
0 |
0 |
4046 |
4046 |
193 |
193 |
此外,每一个 GPTimer 句柄会从 heap 中动态申请约 100 字节的内存。如果还使能了 gptimer_config_t::flags::allow_pd 选项,那么每个定时器还会在睡眠期间额外消耗约 30 字节的内存用于保存寄存器上下文。
应用示例
peripherals/timer_group/gptimer 演示了如何在 ESP 芯片上使用通用定时器 API 生成周期性警报事件,触发不同的警报动作。
peripherals/timer_group/wiegand_interface 使用两个定时器(一个在单次警报模式下,另一个在周期警报模式下),触发中断并在警报事件的回调函数中改变 GPIO 的输出状态,从而模拟出了 Wiegand 协议的输出波形。
API 参考
GPTimer 驱动 API
Header File
This header file can be included with:
#include "driver/gptimer.h"
This header file is a part of the API provided by the
esp_driver_gptimercomponent. To declare that your component depends onesp_driver_gptimer, add the following to your CMakeLists.txt:REQUIRES esp_driver_gptimer
or
PRIV_REQUIRES esp_driver_gptimer
Functions
-
esp_err_t gptimer_new_timer(const gptimer_config_t *config, gptimer_handle_t *ret_timer)
Create a new General Purpose Timer, and return the handle.
备注
The newly created timer is put in the "init" state.
- 参数:
config -- [in] GPTimer configuration
ret_timer -- [out] Returned timer handle
- 返回:
ESP_OK: Create GPTimer successfully
ESP_ERR_INVALID_ARG: Create GPTimer failed because of invalid argument
ESP_ERR_NO_MEM: Create GPTimer failed because out of memory
ESP_ERR_NOT_FOUND: Create GPTimer failed because all hardware timers are used up and no more free one
ESP_FAIL: Create GPTimer failed because of other error
-
esp_err_t gptimer_del_timer(gptimer_handle_t timer)
Delete the GPTimer handle.
备注
A timer must be in the "init" state before it can be deleted.
- 参数:
timer -- [in] Timer handle created by
gptimer_new_timer- 返回:
ESP_OK: Delete GPTimer successfully
ESP_ERR_INVALID_ARG: Delete GPTimer failed because of invalid argument
ESP_ERR_INVALID_STATE: Delete GPTimer failed because the timer is not in init state
ESP_FAIL: Delete GPTimer failed because of other error
-
esp_err_t gptimer_set_raw_count(gptimer_handle_t timer, uint64_t value)
Set GPTimer raw count value.
备注
When updating the raw count of an active timer, the timer will immediately start counting from the new value.
备注
This function is allowed to run within ISR context
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timervalue -- [in] Count value to be set
- 返回:
ESP_OK: Set GPTimer raw count value successfully
ESP_ERR_INVALID_ARG: Set GPTimer raw count value failed because of invalid argument
ESP_FAIL: Set GPTimer raw count value failed because of other error
-
esp_err_t gptimer_get_raw_count(gptimer_handle_t timer, uint64_t *value)
Get GPTimer raw count value.
备注
This function will trigger a software capture event and then return the captured count value.
备注
With the raw count value and the resolution returned from
gptimer_get_resolution, you can convert the count value into seconds.备注
This function is allowed to run within ISR context
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timervalue -- [out] Returned GPTimer count value
- 返回:
ESP_OK: Get GPTimer raw count value successfully
ESP_ERR_INVALID_ARG: Get GPTimer raw count value failed because of invalid argument
ESP_FAIL: Get GPTimer raw count value failed because of other error
-
esp_err_t gptimer_get_resolution(gptimer_handle_t timer, uint32_t *out_resolution)
Return the real resolution of the timer.
备注
usually the timer resolution is same as what you configured in the
gptimer_config_t::resolution_hz, but some unstable clock source (e.g. RC_FAST) will do a calibration, the real resolution can be different from the configured one.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timerout_resolution -- [out] Returned timer resolution, in Hz
- 返回:
ESP_OK: Get GPTimer resolution successfully
ESP_ERR_INVALID_ARG: Get GPTimer resolution failed because of invalid argument
ESP_FAIL: Get GPTimer resolution failed because of other error
-
esp_err_t gptimer_get_captured_count(gptimer_handle_t timer, uint64_t *value)
Get GPTimer captured count value.
备注
Different from
gptimer_get_raw_count, this function won't trigger a software capture event. It just returns the last captured count value. It's especially useful when the capture has already been triggered by an external event and you want to read the captured value.备注
This function is allowed to run within ISR context
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timervalue -- [out] Returned captured count value
- 返回:
ESP_OK: Get GPTimer captured count value successfully
ESP_ERR_INVALID_ARG: Get GPTimer captured count value failed because of invalid argument
ESP_FAIL: Get GPTimer captured count value failed because of other error
-
esp_err_t gptimer_register_event_callbacks(gptimer_handle_t timer, const gptimer_event_callbacks_t *cbs, void *user_data)
Set callbacks for GPTimer.
备注
User registered callbacks are expected to be runnable within ISR context
备注
The first call to this function needs to be before the call to
gptimer_enable备注
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timercbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- 返回:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE: Set event callbacks failed because the timer is not in init state
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t gptimer_set_alarm_action(gptimer_handle_t timer, const gptimer_alarm_config_t *config)
Set alarm event actions for GPTimer.
备注
This function is allowed to run within ISR context, so you can update new alarm action immediately in any ISR callback.
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled. In this case, please also ensure thegptimer_alarm_config_tinstance is placed in the static data section instead of in the read-only data section. e.g.:static gptimer_alarm_config_t alarm_config = { ... };- 参数:
timer -- [in] Timer handle created by
gptimer_new_timerconfig -- [in] Alarm configuration, especially, set config to NULL means disabling the alarm function
- 返回:
ESP_OK: Set alarm action for GPTimer successfully
ESP_ERR_INVALID_ARG: Set alarm action for GPTimer failed because of invalid argument
ESP_FAIL: Set alarm action for GPTimer failed because of other error
-
esp_err_t gptimer_enable(gptimer_handle_t timer)
Enable GPTimer.
备注
This function will transit the timer state from "init" to "enable".
备注
This function will enable the interrupt service, if it's lazy installed in
gptimer_register_event_callbacks.备注
This function will acquire a PM lock, if a specific source clock (e.g. APB) is selected in the
gptimer_config_t, whileCONFIG_PM_ENABLEis enabled.备注
Enable a timer doesn't mean to start it. See also
gptimer_startfor how to make the timer start counting.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timer- 返回:
ESP_OK: Enable GPTimer successfully
ESP_ERR_INVALID_ARG: Enable GPTimer failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable GPTimer failed because the timer is already enabled
ESP_FAIL: Enable GPTimer failed because of other error
-
esp_err_t gptimer_disable(gptimer_handle_t timer)
Disable GPTimer.
备注
This function will transit the timer state from "enable" to "init".
备注
This function will disable the interrupt service if it's installed.
备注
This function will release the PM lock if it's acquired in the
gptimer_enable.备注
Disable a timer doesn't mean to stop it. See also
gptimer_stopfor how to make the timer stop counting.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timer- 返回:
ESP_OK: Disable GPTimer successfully
ESP_ERR_INVALID_ARG: Disable GPTimer failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable GPTimer failed because the timer is not enabled yet
ESP_FAIL: Disable GPTimer failed because of other error
-
esp_err_t gptimer_start(gptimer_handle_t timer)
Start GPTimer (internal counter starts counting)
备注
This function will transit the timer state from "enable" to "run".
备注
This function is allowed to run within ISR context
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timer- 返回:
ESP_OK: Start GPTimer successfully
ESP_ERR_INVALID_ARG: Start GPTimer failed because of invalid argument
ESP_ERR_INVALID_STATE: Start GPTimer failed because the timer is not enabled or is already in running
ESP_FAIL: Start GPTimer failed because of other error
-
esp_err_t gptimer_stop(gptimer_handle_t timer)
Stop GPTimer (internal counter stops counting)
备注
This function will transit the timer state from "run" to "enable".
备注
This function is allowed to run within ISR context
备注
If
CONFIG_GPTIMER_CTRL_FUNC_IN_IRAMis enabled, this function will be placed in the IRAM by linker, makes it possible to execute even when the Flash Cache is disabled.- 参数:
timer -- [in] Timer handle created by
gptimer_new_timer- 返回:
ESP_OK: Stop GPTimer successfully
ESP_ERR_INVALID_ARG: Stop GPTimer failed because of invalid argument
ESP_ERR_INVALID_STATE: Stop GPTimer failed because the timer is not in running.
ESP_FAIL: Stop GPTimer failed because of other error
Structures
-
struct gptimer_config_t
General Purpose Timer configuration.
Public Members
-
gptimer_clock_source_t clk_src
GPTimer clock source
-
gptimer_count_direction_t direction
Count direction
-
uint32_t resolution_hz
Counter resolution (working frequency) in Hz, hence, the step size of each count tick equals to (1 / resolution_hz) seconds
-
int intr_priority
GPTimer interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
Set true, the timer interrupt number can be shared with other peripherals
-
uint32_t allow_pd
If set, driver allows the power domain to be powered off when system enters sleep mode. This can save power, but at the expense of more RAM being consumed to save register context.
-
struct gptimer_config_t flags
GPTimer config flags
-
gptimer_clock_source_t clk_src
-
struct gptimer_event_callbacks_t
Group of supported GPTimer callbacks.
备注
The callbacks are all running under ISR environment
备注
When CONFIG_GPTIMER_ISR_CACHE_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM.
Public Members
-
gptimer_alarm_cb_t on_alarm
Timer alarm callback
-
gptimer_alarm_cb_t on_alarm
-
struct gptimer_alarm_config_t
General Purpose Timer alarm configuration.
Public Members
-
uint64_t alarm_count
Alarm target count value
-
uint64_t reload_count
Alarm reload count value, effect only when
auto_reload_on_alarmis set to true
-
uint32_t auto_reload_on_alarm
Reload the count value by hardware, immediately at the alarm event
-
struct gptimer_alarm_config_t flags
Alarm config flags
-
uint64_t alarm_count
GPTimer 驱动类型
Header File
components/esp_driver_gptimer/include/driver/gptimer_types.h
This header file can be included with:
#include "driver/gptimer_types.h"
This header file is a part of the API provided by the
esp_driver_gptimercomponent. To declare that your component depends onesp_driver_gptimer, add the following to your CMakeLists.txt:REQUIRES esp_driver_gptimer
or
PRIV_REQUIRES esp_driver_gptimer
Structures
-
struct gptimer_alarm_event_data_t
GPTimer alarm event data.
Type Definitions
-
typedef struct gptimer_t *gptimer_handle_t
Type of General Purpose Timer handle.
-
typedef bool (*gptimer_alarm_cb_t)(gptimer_handle_t timer, const gptimer_alarm_event_data_t *edata, void *user_ctx)
Timer alarm callback prototype.
- Param timer:
[in] Timer handle created by
gptimer_new_timer- Param edata:
[in] Alarm event data, fed by driver
- Param user_ctx:
[in] User data, passed from
gptimer_register_event_callbacks- Return:
Whether a high priority task has been waken up by this function
GPTimer HAL 类型
Header File
This header file can be included with:
#include "hal/timer_types.h"
This header file is a part of the API provided by the
esp_hal_timgcomponent. To declare that your component depends onesp_hal_timg, add the following to your CMakeLists.txt:REQUIRES esp_hal_timg
or
PRIV_REQUIRES esp_hal_timg
Type Definitions
-
typedef soc_periph_gptimer_clk_src_t gptimer_clock_source_t
GPTimer clock source.
备注
User should select the clock source based on the power and resolution requirement