Sensor Hub 简介
Sensor Hub 是一个传感器管理组件,可以实现对传感器设备的硬件抽象、设备管理和数据分发。基于 Sensor Hub 开发应用程序时,用户无需处理复杂的传感器实现,只需要对传感器的工作方式、采集间隔、量程等进行简单的选择,然后向关心的事件消息注册回调函数,即可在传感器状态切换或者数据采集好时收到通知。
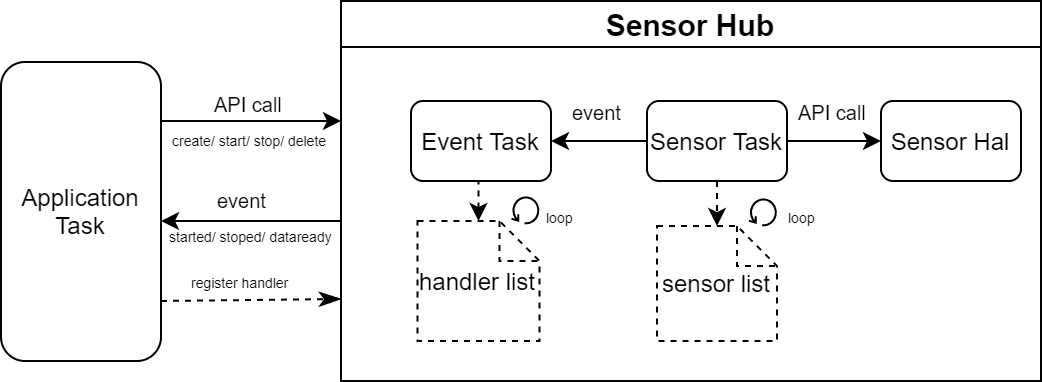
Sensor Hub 编程模型
Sensor Hub 支持以组件方式加载传感器驱动,用户在添加传感器时只需填入注册到 Sensor Hub 的传感器名称即可直接获取对应的传感器驱动。此外,该组件由于实现了对传感器的集中管理,在简化操作的同时也提高了运行效率,可作为传感器应用的基础组件,应用在环境感知、运动感知、健康管理等更多智能化场景中。
Sensor Hub 驱动
Sensor Hub 使用方法
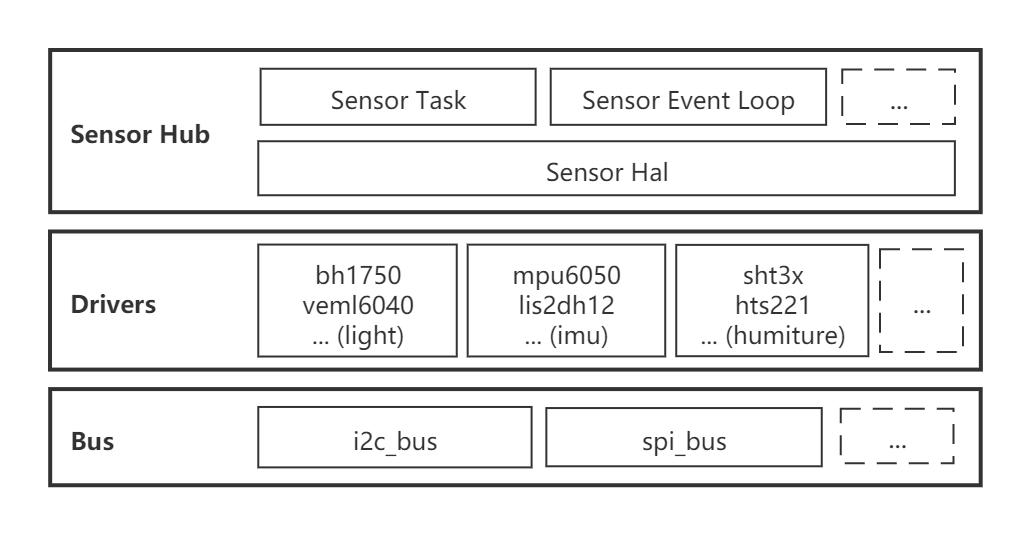
sensor_hub 采用 链接器脚本生成机制 将传感器驱动注册到特定的目标文件段中。对于应用开发者而言,无需关注传感器驱动的具体实现,只需添加对应的传感器组件即可加载对应的驱动。
驱动开发者:
以 ShT3X 温湿度传感器为例,驱动开发者需要将与传感器相关的操作填入到 humiture_impl_t,并创建传感器检测函数。sensor_hub 提供了用于传感器注册接口:SENSOR_HUB_DETECT_FN,驱动开发者可以直接将对应的函数填入到注册接口中。
static humiture_impl_t sht3x_impl = {
.init = humiture_sht3x_init,
.deinit = humiture_sht3x_deinit,
.test = humiture_sht3x_test,
.acquire_humidity = humiture_sht3x_acquire_humidity,
.acquire_temperature = humiture_sht3x_acquire_temperature,
};
SENSOR_HUB_DETECT_FN(HUMITURE_ID, sht3x, &sht3x_impl);
同时,在组件的 CMakeLists.txt 中添加接口依赖:
target_link_libraries(${COMPONENT_LIB} INTERFACE "-u humiture_sht3x_init")
应用开发者:
在工程的
idf_component.yml中添加sensor_hub与所需的传感器组件。创建一个传感器实例:使用
iot_sensor_create()创建一个传感器实例,参数包括传感器名称、传感器配置项和传感器句柄指针。传感器名称用于查找和加载注册到sensor_hub中的传感器的驱动,若传感器支持地址可配置,则可以多次创建该名称的传感器。配置项中bus用于指定传感器挂载到的总线位置;addr用于指定传感器对应的地址;type用于指定传感器对应的类型;mode用于指定传感器的工作模式;min_delay用于指定传感器的采集间隔,其它均为非必须项。创建成功之后,获得该传感器句柄;
sensor_config_t sht3x_config = {
.bus = i2c0_bus_handle,
.addr = 0x44,
.mode = MODE_POLLING,
.min_delay = SENSOR_PERIOD,
};
iot_sensor_create("sht3x", &sht3x_config, &sht3x_handle)
注册传感器事件回调函数:在传感器事件发生时,回调函数将会被依次调用,注册回调函数的方法有以下两种,注册成功之后将返回事件回调函数实例句柄:
使用
iot_sensor_handler_register()通过传感器句柄注册回调函数使用
iot_sensor_handler_register_with_type()通过传感器类型注册回调函数
启动传感器:使用
iot_sensor_start()启动指定的传感器,传感器启动之后将发出SENSOR_STARTED事件,之后将以设定的周期持续采集传感器数据,并发送SENSOR_XXXX_DATA_READY事件。事件回调函数可通过event_data参数获取每一个事件的具体数据;停止传感器:使用
iot_sensor_stop()可临时关闭指定的传感器,传感器关闭之后将发出SENSOR_STOPED事件,之后采集工作将停止。如果该传感器驱动支持电源管理,传感器将被设置为睡眠模式;取消注册传感器事件回调函数:用户程序可在任意时刻使用事件回调函数实例句柄取消对事件的注册,之后该事件发生时,该回调函数将不再被调用。取消注册的方法对应也有两种:
使用
iot_sensor_handler_unregister()通过传感器句柄取消已注册的回调函数使用
iot_sensor_handler_unregister_with_type()通过传感器类型取消已经注册的回调函数
删除传感器:使用
iot_sensor_delete()可删除对应的传感器,释放已分配的内存等资源。
示例程序
温湿度传感器控制 LED 开关示例:sensors/sensor_control_led。
传感器监测示例:sensors/sensor_hub_monitor。
API 参考
Header File
Structures
-
struct sensor_data_t
sensor data type
Public Members
-
int64_t timestamp
timestamp
-
const char *sensor_name
sensor name
-
sensor_type_t sensor_type
sensor type
-
uint8_t sensor_addr
sensor addr
-
int32_t event_id
reserved for future use
-
uint32_t min_delay
minimum delay between two events, unit: ms
-
axis3_t acce
Accelerometer. unit: G
-
axis3_t gyro
Gyroscope. unit: dps
-
axis3_t mag
Magnetometer. unit: Gauss
-
float temperature
Temperature. unit: dCelsius
-
float humidity
Relative humidity. unit: percentage
-
float baro
Pressure. unit: pascal (Pa)
-
float light
Light. unit: lux
-
rgbw_t rgbw
Color. unit: lux
-
uv_t uv
ultraviole unit: lux
-
float proximity
Distance. unit: centimeters
-
float hr
Heat rate. unit: HZ
-
float tvoc
TVOC. unit: permillage
-
float noise
Noise Loudness. unit: HZ
-
float step
Step sensor. unit: 1
-
float force
Force sensor. unit: mN
-
float current
Current sensor unit: mA
-
float voltage
Voltage sensor unit: mV
-
float data[4]
for general use
-
int64_t timestamp
-
struct sensor_data_group_t
sensor data group type
Public Members
-
uint8_t number
effective data number
-
sensor_data_t sensor_data[SENSOR_DATA_GROUP_MAX_NUM]
data buffer
-
uint8_t number
Macros
-
SENSOR_EVENT_ANY_ID
register handler for any event id
Type Definitions
-
typedef void *sensor_device_impl_t
-
typedef void *sensor_driver_handle_t
hal level sensor driver handle
-
typedef void *bus_handle_t
i2c/spi bus handle
Enumerations
-
enum sensor_type_t
sensor type
Values:
-
enumerator NULL_ID
NULL
-
enumerator HUMITURE_ID
humidity or temperature sensor
-
enumerator IMU_ID
gyro or acc sensor
-
enumerator LIGHT_SENSOR_ID
light illumination or uv or color sensor
-
enumerator SENSOR_TYPE_MAX
max sensor type
-
enumerator NULL_ID
-
enum sensor_command_t
sensor operate command
Values:
-
enumerator COMMAND_SET_MODE
set measure mode
-
enumerator COMMAND_SET_RANGE
set measure range
-
enumerator COMMAND_SET_ODR
set output rate
-
enumerator COMMAND_SET_POWER
set power mode
-
enumerator COMMAND_SELF_TEST
sensor self test
-
enumerator COMMAND_MAX
max sensor command
-
enumerator COMMAND_SET_MODE
-
enum sensor_power_mode_t
sensor power mode
Values:
-
enumerator POWER_MODE_WAKEUP
wakeup from sleep
-
enumerator POWER_MODE_SLEEP
set to sleep
-
enumerator POWER_MAX
max sensor power mode
-
enumerator POWER_MODE_WAKEUP
-
enum sensor_mode_t
sensor acquire mode
Values:
-
enumerator MODE_DEFAULT
default work mode
-
enumerator MODE_POLLING
polling acquire with a interval time
-
enumerator MODE_INTERRUPT
interrupt mode, acquire data when interrupt comes
-
enumerator MODE_MAX
max sensor mode
-
enumerator MODE_DEFAULT
-
enum sensor_range_t
sensor acquire range
Values:
-
enumerator RANGE_DEFAULT
default range
-
enumerator RANGE_MIN
minimum range for high-speed or high-precision
-
enumerator RANGE_MEDIUM
medium range for general use
-
enumerator RANGE_MAX
maximum range for full scale
-
enumerator RANGE_DEFAULT
-
enum sensor_event_id_t
sensor general events
Values:
-
enumerator SENSOR_STARTED
sensor started, data acquire will be started
-
enumerator SENSOR_STOPED
sensor stopped, data acquire will be stopped
-
enumerator SENSOR_EVENT_COMMON_END
max common events id
-
enumerator SENSOR_STARTED
-
enum sensor_data_event_id_t
sensor data ready events
Values:
-
enumerator SENSOR_ACCE_DATA_READY
Accelerometer data ready
-
enumerator SENSOR_GYRO_DATA_READY
Gyroscope data ready
-
enumerator SENSOR_MAG_DATA_READY
Magnetometer data ready
-
enumerator SENSOR_TEMP_DATA_READY
Temperature data ready
-
enumerator SENSOR_HUMI_DATA_READY
Relative humidity data ready
-
enumerator SENSOR_BARO_DATA_READY
Pressure data ready
-
enumerator SENSOR_LIGHT_DATA_READY
Light data ready
-
enumerator SENSOR_RGBW_DATA_READY
Color data ready
-
enumerator SENSOR_UV_DATA_READY
ultraviolet data ready
-
enumerator SENSOR_PROXI_DATA_READY
Distance data ready
-
enumerator SENSOR_HR_DATA_READY
Heat rate data ready
-
enumerator SENSOR_TVOC_DATA_READY
TVOC data ready
-
enumerator SENSOR_NOISE_DATA_READY
Noise Loudness data ready
-
enumerator SENSOR_STEP_DATA_READY
Step data ready
-
enumerator SENSOR_FORCE_DATA_READY
Force data ready
-
enumerator SENSOR_CURRENT_DATA_READY
Current data ready
-
enumerator SENSOR_VOLTAGE_DATA_READY
Voltage data ready
-
enumerator SENSOR_EVENT_ID_END
max common events id
-
enumerator SENSOR_ACCE_DATA_READY
Header File
Functions
-
esp_err_t iot_sensor_create(const char *sensor_name, const sensor_config_t *config, sensor_handle_t *p_sensor_handle)
Create a sensor instance with specified name and desired configurations.
- 参数
sensor_name – sensor’s name. Sensor information will be registered by ESP_SENSOR_DETECT_FN
config – sensor’s configurations detailed in sensor_config_t
p_sensor_handle – return sensor handle if succeed, NULL if failed.
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_start(sensor_handle_t sensor_handle)
start sensor acquisition, post data ready events when data acquired. if start succeed, sensor will start to acquire data with desired mode and post events in min_delay(ms) intervals SENSOR_STARTED event will be posted.
- 参数
sensor_handle – sensor handle for operation
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_stop(sensor_handle_t sensor_handle)
stop sensor acquisition, and stop post data events. if stop succeed, SENSOR_STOPED event will be posted.
- 参数
sensor_handle – sensor handle for operation
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_delete(sensor_handle_t p_sensor_handle)
delete and release the sensor resource.
- 参数
p_sensor_handle – sensor handle, will set to NULL if delete succeed.
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
int iot_sensor_scan()
Scan for valid sensors registered in the system.
- 返回
int number of valid sensors
-
esp_err_t iot_sensor_handler_register(sensor_handle_t sensor_handle, sensor_event_handler_t handler, sensor_event_handler_instance_t *context)
Register a event handler to a sensor’s event with sensor_handle.
- 参数
sensor_handle – sensor handle for operation
handler – the handler function which gets called when the sensor’s any event is dispatched
context – An event handler instance object related to the registered event handler and data, can be NULL. This needs to be kept if the specific callback instance should be unregistered before deleting the whole event loop. Registering the same event handler multiple times is possible and yields distinct instance objects. The data can be the same for all registrations. If no unregistration is needed but the handler should be deleted when the event loop is deleted, instance can be NULL.
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_handler_unregister(sensor_handle_t sensor_handle, sensor_event_handler_instance_t context)
Unregister a event handler from a sensor’s event.
- 参数
sensor_handle – sensor handle for operation
context – the instance object of the registration to be unregistered
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_handler_register_with_type(sensor_type_t sensor_type, int32_t event_id, sensor_event_handler_t handler, sensor_event_handler_instance_t *context)
Register a event handler with sensor_type instead of sensor_handle. the api only care about the event type, don’t care who post it.
- 参数
sensor_type – sensor type declared in sensor_type_t.
event_id – sensor event declared in sensor_event_id_t and sensor_data_event_id_t
handler – the handler function which gets called when the event is dispatched
context – An event handler instance object related to the registered event handler and data, can be NULL. This needs to be kept if the specific callback instance should be unregistered before deleting the whole event loop. Registering the same event handler multiple times is possible and yields distinct instance objects. The data can be the same for all registrations. If no unregistration is needed but the handler should be deleted when the event loop is deleted, instance can be NULL.
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
-
esp_err_t iot_sensor_handler_unregister_with_type(sensor_type_t sensor_type, int32_t event_id, sensor_event_handler_instance_t context)
Unregister a event handler from a event. the api only care about the event type, don’t care who post it.
- 参数
sensor_type – sensor type declared in sensor_type_t.
event_id – sensor event declared in sensor_event_id_t and sensor_data_event_id_t
context – the instance object of the registration to be unregistered
- 返回
esp_err_t
ESP_OK Success
ESP_FAIL Fail
Structures
-
struct sensor_info_t
sensor information, written by the driver developer.
-
struct sensor_config_t
sensor initialization parameter
Public Members
-
bus_handle_t bus
i2c/spi bus handle
-
uint8_t addr
set addr of sensor
-
sensor_type_t type
sensor type
-
sensor_mode_t mode
set acquire mode detiled in sensor_mode_t
-
sensor_range_t range
set measuring range
-
uint32_t min_delay
set minimum acquisition interval
-
int intr_pin
set interrupt pin
-
int intr_type
set interrupt type
-
bus_handle_t bus
-
struct sensor_hub_detect_fn_t
Detection function interface for sensors.
Public Members
-
void *(*fn)(sensor_info_t *sensor_info)
Function pointer for sensor detection.
This function detects a sensor based on the provided sensor information.
- Param sensor_info
Pointer to the sensor information structure
- Return
void* Pointer to the detected sensor instance, or NULL if detection failed
-
void *(*fn)(sensor_info_t *sensor_info)
Macros
-
SENSOR_HUB_DETECT_FN(type_id, name_id, impl)
Defines a sensor detection function to be executed automatically in the application layer.
This macro defines a function and its corresponding metadata to facilitate automatic sensor detection and initialization. The function must return the implementation (
impl) on success; otherwise, an error is logged, and the automatic detection process in the application layer will be aborted.To prevent the linker from optimizing out the sensor driver, the driver must include at least one undefined symbol that is explicitly referenced during the linking phase. This ensures that the linker retains the driver, even if no other files directly depend on its symbols.
For example, in the sensor driver’s
CMakeLists.txt, include the following to force the linker to keep the required symbol:target_link_libraries(${COMPONENT_LIB} INTERFACE “-u <symbol_name>”)
Replace
<symbol_name>with an appropriate symbol, such assht3x_init, defined in the driver.- 参数
type_id – The sensor type identifier.
name_id – The unique name identifier for the sensor.
impl – The implementation returned on successful detection.
Type Definitions
-
typedef void *sensor_handle_t
sensor handle
-
typedef void *sensor_event_handler_instance_t
sensor event handler handle
-
typedef void (*sensor_event_handler_t)(void *event_handler_arg, sensor_event_base_t event_base, int32_t event_id, void *event_data)
function called when an event is posted to the queue