Motor Control Pulse Width Modulator (MCPWM)
The MCPWM peripheral is a versatile PWM generator, which contains various submodules to make it a key element in power electronic applications like motor control, digital power, and so on. Typically, the MCPWM peripheral can be used in the following scenarios:
Digital motor control, e.g., brushed/brushless DC motor, RC servo motor
Switch mode-based digital power conversion
Power DAC, where the duty cycle is equivalent to a DAC analog value
Calculate external pulse width, and convert it into other analog values like speed, distance
Generate Space Vector PWM (SVPWM) signals for Field Oriented Control (FOC)
The main submodules are listed in the following diagram:
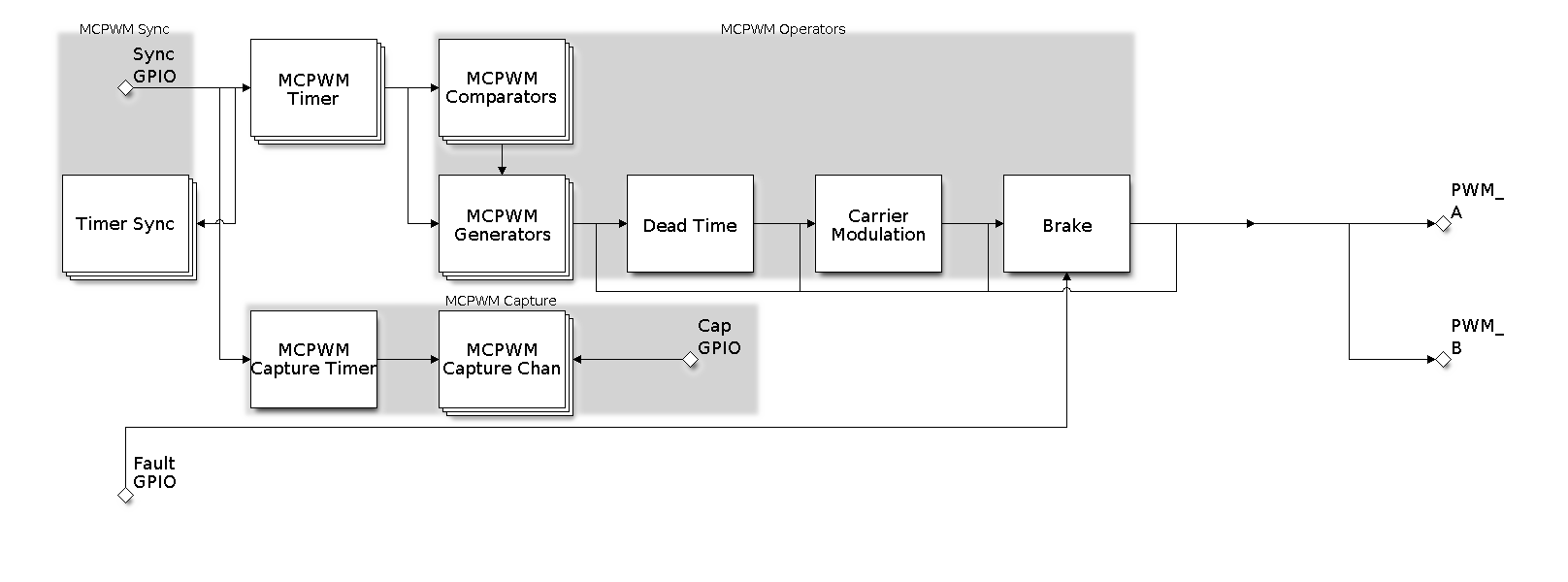
MCPWM Overview
MCPWM Timer: The time base of the final PWM signal. It also determines the event timing of other submodules.
MCPWM Operator: The key module that is responsible for generating the PWM waveforms. It consists of other submodules, like comparator, PWM generator, dead time, and carrier modulator.
MCPWM Comparator: The compare module takes the time-base count value as input, and continuously compares it to the threshold value configured. When the timer is equal to any of the threshold values, a compare event will be generated and the MCPWM generator can update its level accordingly.
MCPWM Generator: One MCPWM generator can generate a pair of PWM waves, complementarily or independently, based on various events triggered by other submodules like MCPWM Timer and MCPWM Comparator.
MCPWM Fault: The fault module is used to detect the fault condition from outside, mainly via the GPIO matrix. Once the fault signal is active, MCPWM Operator will force all the generators into a predefined state to protect the system from damage.
MCPWM Sync: The sync module is used to synchronize the MCPWM timers, so that the final PWM signals generated by different MCPWM generators can have a fixed phase difference. The sync signal can be routed from the GPIO matrix or from an MCPWM Timer event.
Dead Time: This submodule is used to insert extra delay to the existing PWM edges generated in the previous steps.
Carrier Modulation: The carrier submodule can modulate a high-frequency carrier signal into PWM waveforms by the generator and dead time submodules. This capability is mandatory for controlling the power-switching elements.
Brake: MCPWM operator can set how to brake the generators when a particular fault is detected. You can shut down the PWM output immediately or regulate the PWM output cycle by cycle, depending on how critical the fault is.
MCPWM Capture: This is a standalone submodule that can work even without the above MCPWM operators. The capture consists one dedicated timer and several independent channels, with each channel connected to the GPIO. A pulse on the GPIO triggers the capture timer to store the time-base count value and then notify you by an interrupt. Using this feature, you can measure a pulse width precisely. What is more, the capture timer can also be synchronized by the MCPWM Sync submodule.
Functional Overview
Description of the MCPWM functionality is divided into the following sections:
Resource Allocation and Initialization - covers how to allocate various MCPWM objects, like timers, operators, comparators, generators and so on. These objects are the basis of the following IO setting and control functions.
Timer Operations and Events - describes control functions and event callbacks supported by the MCPWM timer.
Comparator Operations and Events - describes control functions and event callbacks supported by the MCPWM comparator.
Generator Actions on Events - describes how to set actions for MCPWM generators on particular events that are generated by the MCPWM timer and comparators.
Generator Configurations for Classical PWM Waveforms - demonstrates some classical PWM waveforms that can be achieved by configuring generator actions.
Dead Time - describes how to set dead time for MCPWM generators.
Dead Time Configurations for Classical PWM Waveforms - demonstrates some classical PWM waveforms that can be achieved by configuring dead time.
Carrier Modulation - describes how to set and modulate a high frequency onto the final PWM waveforms.
Faults and Brake Actions - describes how to set brake actions for MCPWM operators on particular fault events.
Generator Force Actions - describes how to control the generator output level asynchronously in a forceful way.
Synchronization - describes how to synchronize the MCPWM timers and get a fixed phase difference between the generated PWM signals.
Capture - describes how to use the MCPWM capture module to measure the pulse width of a signal.
ETM Event and Task - describes what the events and tasks can be connected to the ETM channel.
Power Management - describes how different source clocks affects power consumption.
Resolution Configuration - describes the resolution configuration rules for the MCPWM submodule.
IRAM Safe - describes tips on how to make the RMT interrupt work better along with a disabled cache.
Thread Safety - lists which APIs are guaranteed to be thread-safe by the driver.
Kconfig Options - lists the supported Kconfig options that can bring different effects to the driver.
Resource Allocation and Initialization
As displayed in the diagram above, the MCPWM peripheral consists of several submodules. Each submodule has its own resource allocation, which is described in the following sections.
MCPWM Timers
You can allocate a MCPWM timer object by calling mcpwm_new_timer() function, with a configuration structure mcpwm_timer_config_t as the parameter. The configuration structure is defined as:
mcpwm_timer_config_t::group_idspecifies the MCPWM group ID. The ID should belong to [0,MCPWM_GROUP_NUM- 1] range, whereMCPWM_GROUP_NUMis the number of MCPWM groups available on the chip. Please note, timers located in different groups are totally independent.
Note
For the number of MCPWM groups available on the chip, please refer to ESP32-C6 Technical Reference Manual > Motor Control PWM (MCPWM) [PDF].
mcpwm_timer_config_t::intr_prioritysets the priority of the interrupt. If it is set to0, the driver will allocate an interrupt with a default priority. Otherwise, the driver will use the given priority.mcpwm_timer_config_t::clk_srcsets the clock source of the timer.mcpwm_timer_config_t::resolution_hzsets the expected resolution of the timer. The driver internally sets a proper divider based on the clock source and the resolution.mcpwm_timer_config_t::count_modesets the count mode of the timer.mcpwm_timer_config_t::period_tickssets the period of the timer, in ticks (the tick resolution is set in themcpwm_timer_config_t::resolution_hz).mcpwm_timer_config_t::flags::update_period_on_emptysets whether to update the period value when the timer counts to zero.mcpwm_timer_config_t::flags::update_period_on_syncsets whether to update the period value when the timer takes a sync signal.
The mcpwm_new_timer() will return a pointer to the allocated timer object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free timers in the MCPWM group, this function will return the ESP_ERR_NOT_FOUND error. [1]
On the contrary, calling the mcpwm_del_timer() function will free the allocated timer object.
Note
The prescale for the MCPWM group will be calculated with the resolution of the first timer, and the driver will find the appropriate prescale from low to high. If there is a prescale conflict when allocating multiple timers, allocate timers in order of their target resolution, either from highest to lowest or lowest to highest. For more information, please refer to Resolution Configuration.
MCPWM Operators
You can allocate a MCPWM operator object by calling mcpwm_new_operator()() function, with a configuration structure mcpwm_operator_config_t as the parameter. The configuration structure is defined as:
mcpwm_operator_config_t::group_idspecifies the MCPWM group ID. The ID should belong to [0,MCPWM_GROUP_NUM- 1] range, whereMCPWM_GROUP_NUMis the number of MCPWM groups available on the chip. Please note, operators located in different groups are totally independent.mcpwm_operator_config_t::intr_prioritysets the priority of the interrupt. If it is set to0, the driver will allocate an interrupt with a default priority. Otherwise, the driver will use the given priority.mcpwm_operator_config_t::flags::update_gen_action_on_tezsets whether to update the generator action when the timer counts to zero. Here and below, the timer refers to the one that is connected to the operator bymcpwm_operator_connect_timer().mcpwm_operator_config_t::flags::update_gen_action_on_tepsets whether to update the generator action when the timer counts to peak.mcpwm_operator_config_t::flags::update_gen_action_on_syncsets whether to update the generator action when the timer takes a sync signal.mcpwm_operator_config_t::flags::update_dead_time_on_tezsets whether to update the dead time when the timer counts to zero.mcpwm_operator_config_t::flags::update_dead_time_on_tepsets whether to update the dead time when the timer counts to the peak.mcpwm_operator_config_t::flags::update_dead_time_on_syncsets whether to update the dead time when the timer takes a sync signal.
The mcpwm_new_operator()() will return a pointer to the allocated operator object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free operators in the MCPWM group, this function will return the ESP_ERR_NOT_FOUND error. [1]
On the contrary, calling mcpwm_del_operator()() function will free the allocated operator object.
MCPWM Comparators
You can allocate a MCPWM comparator object by calling the mcpwm_new_comparator() function, with a MCPWM operator handle and configuration structure mcpwm_comparator_config_t as the parameter. The operator handle is created by mcpwm_new_operator()(). The configuration structure is defined as:
mcpwm_comparator_config_t::intr_prioritysets the priority of the interrupt. If it is set to0, the driver will allocate an interrupt with a default priority. Otherwise, the driver will use the given priority.mcpwm_comparator_config_t::flags::update_cmp_on_tezsets whether to update the compare threshold when the timer counts to zero.mcpwm_comparator_config_t::flags::update_cmp_on_tepsets whether to update the compare threshold when the timer counts to the peak.mcpwm_comparator_config_t::flags::update_cmp_on_syncsets whether to update the compare threshold when the timer takes a sync signal.
The mcpwm_new_comparator() will return a pointer to the allocated comparator object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free comparators in the MCPWM operator, this function will return the ESP_ERR_NOT_FOUND error. [1]
On the contrary, calling the mcpwm_del_comparator() function will free the allocated comparator object.
MCPWM Generators
You can allocate a MCPWM generator object by calling the mcpwm_new_generator() function, with a MCPWM operator handle and configuration structure mcpwm_generator_config_t as the parameter. The operator handle is created by mcpwm_new_operator()(). The configuration structure is defined as:
mcpwm_generator_config_t::gen_gpio_numsets the GPIO number used by the generator.mcpwm_generator_config_t::flags::invert_pwmsets whether to invert the PWM signal.mcpwm_generator_config_t::pull_upandmcpwm_generator_config_t::pull_downcontrols whether to enable the internal pull-up and pull-down resistors accordingly.
The mcpwm_new_generator() will return a pointer to the allocated generator object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free generators in the MCPWM operator, this function will return the ESP_ERR_NOT_FOUND error. [1]
On the contrary, calling the mcpwm_del_generator() function will free the allocated generator object.
MCPWM Faults
There are two types of faults: A fault signal reflected from the GPIO and a fault generated by software.
To allocate a GPIO fault object, you can call the mcpwm_new_gpio_fault() function, with the configuration structure mcpwm_gpio_fault_config_t as the parameter. The configuration structure is defined as:
mcpwm_gpio_fault_config_t::group_idsets the MCPWM group ID. The ID should belong to [0,MCPWM_GROUP_NUM- 1] range, whereMCPWM_GROUP_NUMis the number of MCPWM groups available on the chip. Please note, GPIO faults located in different groups are totally independent, i.e., GPIO faults in group 0 can not be detected by the operator in group 1.mcpwm_gpio_fault_config_t::intr_prioritysets the priority of the interrupt. If it is set to0, the driver will allocate an interrupt with a default priority. Otherwise, the driver will use the given priority.mcpwm_gpio_fault_config_t::gpio_numsets the GPIO number used by the fault.mcpwm_gpio_fault_config_t::flags::active_levelsets the active level of the fault signal.mcpwm_gpio_fault_config_t::pull_upandmcpwm_gpio_fault_config_t::pull_downset whether to pull up and/or pull down the GPIO internally.
The mcpwm_new_gpio_fault() will return a pointer to the allocated fault object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free GPIO faults in the MCPWM group, this function will return the ESP_ERR_NOT_FOUND error. [1]
Software fault object can be used to trigger a fault by calling the function mcpwm_soft_fault_activate() instead of waiting for a real fault signal on the GPIO. A software fault object can be allocated by calling the mcpwm_new_soft_fault() function, with configuration structure mcpwm_soft_fault_config_t as the parameter. Currently, this configuration structure is left for future purposes.
The mcpwm_new_soft_fault() function will return a pointer to the allocated fault object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there is no memory left for the fault object, this function will return the ESP_ERR_NO_MEM error. Although the software fault and GPIO fault are of different types, the returned fault handle is of the same type.
On the contrary, calling the mcpwm_del_fault() function will free the allocated fault object, this function works for both software and GPIO fault.
MCPWM Sync Sources
The sync source is what can be used to synchronize the MCPWM timer and MCPWM capture timer. There are three types of sync sources: a sync source reflected from the GPIO, a sync source generated by software, and a sync source generated by an MCPWM timer event.
To allocate a GPIO sync source, you can call the mcpwm_new_gpio_sync_src() function, with configuration structure mcpwm_gpio_sync_src_config_t as the parameter. The configuration structure is defined as:
mcpwm_gpio_sync_src_config_t::group_idsets the MCPWM group ID. The ID should belong to [0,MCPWM_GROUP_NUM- 1] range, whereMCPWM_GROUP_NUMis the number of MCPWM groups available on the chip. Please note, the GPIO sync sources located in different groups are totally independent, i.e., GPIO sync source in group 0 can not be detected by the timers in group 1.mcpwm_gpio_sync_src_config_t::gpio_numsets the GPIO number used by the sync source.mcpwm_gpio_sync_src_config_t::flags::active_negsets whether the sync signal is active on falling edges.mcpwm_gpio_sync_src_config_t::pull_upandmcpwm_gpio_sync_src_config_t::pull_downset whether to pull up and/or pull down the GPIO internally.
The mcpwm_new_gpio_sync_src() will return a pointer to the allocated sync source object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there are no more free GPIO sync sources in the MCPWM group, this function will return the ESP_ERR_NOT_FOUND error. [1]
To allocate a timer event sync source, you can call the mcpwm_new_timer_sync_src() function, with configuration structure mcpwm_timer_sync_src_config_t as the parameter. The configuration structure is defined as:
mcpwm_timer_sync_src_config_t::timer_eventspecifies on what timer event to generate the sync signal.mcpwm_timer_sync_src_config_t::propagate_input_syncsets whether to propagate the input sync signal (i.e., the input sync signal will be routed to its sync output).
The mcpwm_new_timer_sync_src() will return a pointer to the allocated sync source object if the allocation succeeds. Otherwise, it will return an error code. Specifically, if a sync source has been allocated from the same timer before, this function will return the ESP_ERR_INVALID_STATE error.
Last but not least, to allocate a software sync source, you can call the mcpwm_new_soft_sync_src() function, with configuration structure mcpwm_soft_sync_config_t as the parameter. Currently, this configuration structure is left for future purposes.
mcpwm_new_soft_sync_src() will return a pointer to the allocated sync source object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there is no memory left for the sync source object, this function will return the ESP_ERR_NO_MEM error. Please note, to make a software sync source take effect, do not forget to call mcpwm_soft_sync_activate().
On the contrary, calling the mcpwm_del_sync_src() function will free the allocated sync source object. This function works for all types of sync sources.
MCPWM Capture Timer and Channels
The MCPWM group has a dedicated timer which is used to capture the timestamp when a specific event occurred. The capture timer is connected to several independent channels, each channel is assigned a GPIO.
To allocate a capture timer, you can call the mcpwm_new_capture_timer() function, with configuration structure mcpwm_capture_timer_config_t as the parameter. The configuration structure is defined as:
mcpwm_capture_timer_config_t::group_idsets the MCPWM group ID. The ID should belong to [0,MCPWM_GROUP_NUM- 1] range, whereMCPWM_GROUP_NUMis the number of MCPWM groups available on the chip.mcpwm_capture_timer_config_t::clk_srcsets the clock source of the capture timer.mcpwm_capture_timer_config_t::resolution_hzThe driver internally will set a proper divider based on the clock source and the resolution. If it is set to0, the driver will pick an appropriate resolution on its own, and you can subsequently view the current timer resolution viamcpwm_capture_timer_get_resolution().
Note
Timers and capture timers share the MCPWM group clock source. The prescale for the MCPWM group will be calculated with the resolution of the first allocated (capture)timer. The driver will search for the appropriate prescale from low to high. If there is a prescale conflict when allocating multiple (capture)timers, allocate (capture)timers in order of their target resolution, either from highest to lowest or lowest to highest. For more information, please refer to Resolution Configuration.
The mcpwm_new_capture_timer() will return a pointer to the allocated capture timer object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there is no free capture timer left in the MCPWM group, this function will return the ESP_ERR_NOT_FOUND error. [1]
Next, to allocate a capture channel, you can call the mcpwm_new_capture_channel() function, with a capture timer handle and configuration structure mcpwm_capture_channel_config_t as the parameter. The configuration structure is defined as:
mcpwm_capture_channel_config_t::intr_prioritysets the priority of the interrupt. If it is set to0, the driver will allocate an interrupt with a default priority. Otherwise, the driver will use the given priority.mcpwm_capture_channel_config_t::gpio_numsets the GPIO number used by the capture channel.mcpwm_capture_channel_config_t::prescalesets the prescaler of the input signal.mcpwm_capture_channel_config_t::extra_capture_channel_flags::pos_edgeandmcpwm_capture_channel_config_t::extra_capture_channel_flags::neg_edgeset whether to capture on the positive and/or falling edge of the input signal.mcpwm_capture_channel_config_t::extra_capture_channel_flags::pull_upandmcpwm_capture_channel_config_t::extra_capture_channel_flags::pull_downset whether to pull up and/or pull down the GPIO internally.mcpwm_capture_channel_config_t::extra_capture_channel_flags::invert_cap_signalsets whether to invert the capture signal.
The mcpwm_new_capture_channel() will return a pointer to the allocated capture channel object if the allocation succeeds. Otherwise, it will return an error code. Specifically, when there is no free capture channel left in the capture timer, this function will return the ESP_ERR_NOT_FOUND error.
On the contrary, calling mcpwm_del_capture_channel() and mcpwm_del_capture_timer() will free the allocated capture channel and timer object accordingly.
MCPWM Interrupt Priority
MCPWM allows configuring interrupts separately for timer, operator, comparator, fault, and capture events. The interrupt priority is determined by the respective config_t::intr_priority. Additionally, events within the same MCPWM group share a common interrupt source. When registering multiple interrupt events, the interrupt priorities need to remain consistent.
Note
When registering multiple interrupt events within an MCPWM group, the driver will use the interrupt priority of the first registered event as the MCPWM group's interrupt priority.
Timer Operations and Events
Update Period
The timer period is initialized by the mcpwm_timer_config_t::period_ticks parameter in mcpwm_timer_config_t. You can update the period at runtime by calling mcpwm_timer_set_period() function. The new period will take effect based on how you set the mcpwm_timer_config_t::flags::update_period_on_empty and mcpwm_timer_config_t::flags::update_period_on_sync parameters in mcpwm_timer_config_t. If none of them are set, the timer period will take effect immediately.
Register Timer Event Callbacks
The MCPWM timer can generate different events at runtime. If you have some function that should be called when a particular event happens, you should hook your function to the interrupt service routine by calling mcpwm_timer_register_event_callbacks(). The callback function prototype is declared in mcpwm_timer_event_cb_t. All supported event callbacks are listed in the mcpwm_timer_event_callbacks_t:
mcpwm_timer_event_callbacks_t::on_fullsets the callback function for the timer when it counts to peak value.mcpwm_timer_event_callbacks_t::on_emptysets the callback function for the timer when it counts to zero.mcpwm_timer_event_callbacks_t::on_stopsets the callback function for the timer when it is stopped.
The callback functions above are called within the ISR context, so they should not attempt to block. For example, you may make sure that only FreeRTOS APIs with the ISR suffix are called within the function.
The parameter user_data of the mcpwm_timer_register_event_callbacks() function is used to save your own context. It is passed to each callback function directly.
This function will lazy the install interrupt service for the MCPWM timer without enabling it. It is only allowed to be called before mcpwm_timer_enable(), otherwise the ESP_ERR_INVALID_STATE error will be returned. See also Enable and Disable Timer for more information.
Enable and Disable Timer
Before doing IO control to the timer, you need to enable the timer first, by calling mcpwm_timer_enable(). This function:
switches the timer state from init to enable.
enables the interrupt service if it has been lazy installed by
mcpwm_timer_register_event_callbacks().acquire a proper power management lock if a specific clock source (e.g., PLL_160M clock) is selected. See also Power Management for more information.
On the contrary, calling mcpwm_timer_disable() will put the timer driver back to the init state, disable the interrupt service and release the power management lock.
Start and Stop Timer
The basic IO operation of a timer is to start and stop. Calling mcpwm_timer_start_stop() with different mcpwm_timer_start_stop_cmd_t commands can start the timer immediately or stop the timer at a specific event. What is more, you can even start the timer for only one round, which means, the timer will count to peak value or zero, and then stop itself.
Connect Timer with Operator
The allocated MCPWM timer should be connected with an MCPWM operator by calling mcpwm_operator_connect_timer(), so that the operator can take that timer as its time base, and generate the required PWM waves. Please make sure the MCPWM timer and operator are in the same group. Otherwise, this function will return the ESP_ERR_INVALID_ARG error.
Comparator Operations and Events
Register Comparator Event Callbacks
The MCPWM comparator can inform you when the timer counter equals the compare value. If you have some function that should be called when this event happens, you should hook your function to the interrupt service routine by calling mcpwm_comparator_register_event_callbacks(). The callback function prototype is declared in mcpwm_compare_event_cb_t. All supported event callbacks are listed in the mcpwm_comparator_event_callbacks_t:
mcpwm_comparator_event_callbacks_t::on_reachsets the callback function for the comparator when the timer counter equals the compare value.
The callback function provides event-specific data of type mcpwm_compare_event_data_t to you. The callback function is called within the ISR context, so it should not attempt to block. For example, you may make sure that only FreeRTOS APIs with the ISR suffix are called within the function.
The parameter user_data of mcpwm_comparator_register_event_callbacks() function is used to save your own context. It is passed to the callback function directly.
This function will lazy the installation of interrupt service for the MCPWM comparator, whereas the service can only be removed in mcpwm_del_comparator.
Set Compare Value
You can set the compare value for the MCPWM comparator at runtime by calling mcpwm_comparator_set_compare_value(). There are a few points to note:
A new compare value might not take effect immediately. The update time for the compare value is set by
mcpwm_comparator_config_t::flags::update_cmp_on_tezormcpwm_comparator_config_t::flags::update_cmp_on_tepormcpwm_comparator_config_t::flags::update_cmp_on_sync.Make sure the operator has connected to one MCPWM timer already by
mcpwm_operator_connect_timer(). Otherwise, it will return the error codeESP_ERR_INVALID_STATE.The compare value should not exceed the timer's count peak, otherwise, the compare event will never get triggered.
Generator Actions on Events
Set Generator Action on Timer Event
A single generator can be configured to perform multiple actions in response to different timer events. To achieve this, invoke mcpwm_generator_set_action_on_timer_event() for each desired event-action pair. The details of each action are specified using the mcpwm_gen_timer_event_action_t structure.
mcpwm_gen_timer_event_action_t::directionspecifies the timer direction. The supported directions are listed inmcpwm_timer_direction_t.mcpwm_gen_timer_event_action_t::eventspecifies the timer event. The supported timer events are listed inmcpwm_timer_event_t.mcpwm_gen_timer_event_action_t::actionspecifies the generator action to be taken. The supported actions are listed inmcpwm_generator_action_t.
There is a helper macro MCPWM_GEN_TIMER_EVENT_ACTION to simplify the construction of a timer event action entry.
Set Generator Action on Compare Event
A single generator can be configured to perform multiple actions in response to different compare events. To achieve this, invoke mcpwm_generator_set_action_on_compare_event() for each desired compare event and action pair. The specific action settings are encapsulated in the mcpwm_gen_compare_event_action_t structure.
mcpwm_gen_compare_event_action_t::directionspecifies the timer direction. The supported directions are listed inmcpwm_timer_direction_t.mcpwm_gen_compare_event_action_t::comparatorspecifies the comparator handle. See MCPWM Comparators for how to allocate a comparator.mcpwm_gen_compare_event_action_t::actionspecifies the generator action to be taken. The supported actions are listed inmcpwm_generator_action_t.
There is a helper macro MCPWM_GEN_COMPARE_EVENT_ACTION to simplify the construction of a compare event action entry.
Set Generator Action on Fault Event
A single generator can be configured to perform multiple actions in response to fault events. To achieve this, invoke mcpwm_generator_set_action_on_fault_event() for each desired action. The specific actions to be taken are described by the mcpwm_gen_fault_event_action_t structure.
mcpwm_gen_fault_event_action_t::directionspecifies the timer direction. The supported directions are listed inmcpwm_timer_direction_t.mcpwm_gen_fault_event_action_t::faultspecifies the fault used for the trigger. See MCPWM Faults for how to allocate a fault.mcpwm_gen_fault_event_action_t::actionspecifies the generator action to be taken. The supported actions are listed inmcpwm_generator_action_t.
When no free trigger slot is left in the operator to which the generator belongs, this function will return the ESP_ERR_NOT_FOUND error. [1]
The trigger only support GPIO fault. when the input is not a GPIO fault, this function will return the ESP_ERR_NOT_SUPPORTED error.
There is a helper macro MCPWM_GEN_FAULT_EVENT_ACTION to simplify the construction of a trigger event action entry.
Set Generator Action on Sync Event
A single generator can be configured to perform multiple actions in response to different synchronization events. This is achieved by invoking mcpwm_generator_set_action_on_sync_event() for each desired event-action pair. The specific action to be taken for each synchronization event is described by the mcpwm_gen_sync_event_action_t structure.
mcpwm_gen_sync_event_action_t::directionspecifies the timer direction. The supported directions are listed inmcpwm_timer_direction_t.mcpwm_gen_sync_event_action_t::syncspecifies the sync source used for the trigger. See MCPWM Sync Sources for how to allocate a sync source.mcpwm_gen_sync_event_action_t::actionspecifies the generator action to be taken. The supported actions are listed inmcpwm_generator_action_t.
When no free trigger slot is left in the operator to which the generator belongs, this function will return the ESP_ERR_NOT_FOUND error. [1]
The trigger only support one sync action, regardless of the kinds. When set sync actions more than once, this function will return the ESP_ERR_INVALID_STATE error.
There is a helper macro MCPWM_GEN_SYNC_EVENT_ACTION to simplify the construction of a trigger event action entry.
Generator Configurations for Classical PWM Waveforms
This section will demonstrate the classical PWM waveforms that can be generated by the pair of generators. The code snippet that is used to generate the waveforms is also provided below the diagram. Some general summary:
The Symmetric or Asymmetric of the waveforms is determined by the count mode of the MCPWM timer.
The active level of the waveform pair is determined by the level of the PWM with a smaller duty cycle.
The period of the PWM waveform is determined by the timer's period and count mode.
The duty cycle of the PWM waveform is determined by the generator's various action combinations.
Single Edge Asymmetric Waveform - Active High
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
Single Edge Asymmetric Waveform - Active Low
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_HIGH)));
}
Pulse Placement Asymmetric Waveform
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_TOGGLE)));
}
Dual Edge Asymmetric Waveform - Active Low
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, MCPWM_TIMER_EVENT_FULL, MCPWM_GEN_ACTION_HIGH)));
}
Dual Edge Symmetric Waveform - Active Low
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_LOW)));
}
Dual Edge Symmetric Waveform - Complementary
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_DOWN, cmpb, MCPWM_GEN_ACTION_HIGH)));
}
Dead Time
In power electronics, the rectifier and inverter are commonly used. This requires the use of a rectifier bridge and an inverter bridge. Each bridge arm has two power electronic devices, such as MOSFET, IGBT, etc. The two MOSFETs on the same arm can not conduct at the same time, otherwise there will be a short circuit. The fact is that, although the PWM wave shows it is turning off the switch, the MOSFET still needs a small time window to make that happen. This requires an extra delay to be added to the existing PWM wave generated by setting Generator Actions on Events.
The dead time driver works like a decorator. This is also reflected in the function parameters of mcpwm_generator_set_dead_time(), where it takes the primary generator handle (in_generator), and returns a new generator (out_generator) after applying the dead time. Please note, if the out_generator and in_generator are the same, it means you are adding the time delay to the PWM waveform in an "in-place" fashion. In turn, if the out_generator and in_generator are different, it means you are deriving a new PWM waveform from the existing in_generator.
Dead time specific configuration is listed in the mcpwm_dead_time_config_t structure:
mcpwm_dead_time_config_t::posedge_delay_ticksandmcpwm_dead_time_config_t::negedge_delay_ticksset the number of ticks to delay the PWM waveform on the rising and falling edge. Specifically, setting both of them to zero means bypassing the dead time module. The resolution of the dead time tick is the same as the timer that is connected with the operator bymcpwm_operator_connect_timer().mcpwm_dead_time_config_t::invert_outputsets whether to invert the signal after applying the dead time, which can be used to control the delay edge polarity.
Warning
Due to the hardware limitation, one delay module (either posedge delay or negedge delay) can not be applied to multiple MCPWM generators at the same time. e.g., the following configuration is invalid:
mcpwm_dead_time_config_t dt_config = {
.posedge_delay_ticks = 10,
};
// Set posedge delay to generator A
mcpwm_generator_set_dead_time(mcpwm_gen_a, mcpwm_gen_a, &dt_config);
// NOTE: This is invalid, you can not apply the posedge delay to another generator
mcpwm_generator_set_dead_time(mcpwm_gen_b, mcpwm_gen_b, &dt_config);
However, you can apply posedge delay to generator A and negedge delay to generator B. You can also set both posedge delay and negedge delay for generator B, while letting generator A bypass the dead time module. Note that if negedge delay and posedge delay are both set for generator A, generator B will not be available. Where generator A is the first generator requested through the operator handle and generator B is the second generator requested through an operator handle.
Note
It is also possible to generate the required dead time by setting Generator Actions on Events, especially by controlling edge placement using different comparators. However, if the more classical edge delay-based dead time with polarity control is required, then the dead time submodule should be used.
Dead Time Configurations for Classical PWM Waveforms
This section demonstrates the classical PWM waveforms that can be generated by the dead time submodule. The code snippet that is used to generate the waveforms is also provided below the diagram.
Active High Complementary
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
dead_time_config.flags.invert_output = true;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
Active Low Complementary
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
.flags.invert_output = true
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
dead_time_config.flags.invert_output = false;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
Active High
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
Active Low
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
.flags.invert_output = true
};
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
dead_time_config.posedge_delay_ticks = 0;
dead_time_config.negedge_delay_ticks = 100;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, genb, &dead_time_config));
}
Rising Delay on PWMA and Bypass Dead Time for PWMB
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 50,
.negedge_delay_ticks = 0,
};
// apply deadtime to generator_a
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// bypass deadtime module for generator_b
dead_time_config.posedge_delay_ticks = 0;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
Falling Delay on PWMB and Bypass Dead Time for PWMA
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 0,
.negedge_delay_ticks = 0,
};
// generator_a bypass the deadtime module (no delay)
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// apply dead time to generator_b
dead_time_config.negedge_delay_ticks = 50;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
Rising and Falling Delay on PWMB and Bypass Dead Time for PWMA
static void gen_action_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb, mcpwm_cmpr_handle_t cmpa, mcpwm_cmpr_handle_t cmpb)
{
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(gena,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(gena,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpa, MCPWM_GEN_ACTION_LOW)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_timer_event(genb,
MCPWM_GEN_TIMER_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, MCPWM_TIMER_EVENT_EMPTY, MCPWM_GEN_ACTION_HIGH)));
ESP_ERROR_CHECK(mcpwm_generator_set_action_on_compare_event(genb,
MCPWM_GEN_COMPARE_EVENT_ACTION(MCPWM_TIMER_DIRECTION_UP, cmpb, MCPWM_GEN_ACTION_LOW)));
}
static void dead_time_config(mcpwm_gen_handle_t gena, mcpwm_gen_handle_t genb)
{
mcpwm_dead_time_config_t dead_time_config = {
.posedge_delay_ticks = 0,
.negedge_delay_ticks = 0,
};
// generator_a bypass the deadtime module (no delay)
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(gena, gena, &dead_time_config));
// apply dead time on both edge for generator_b
dead_time_config.negedge_delay_ticks = 50;
dead_time_config.posedge_delay_ticks = 50;
ESP_ERROR_CHECK(mcpwm_generator_set_dead_time(genb, genb, &dead_time_config));
}
Carrier Modulation
The MCPWM operator has a carrier submodule that can be used if galvanic isolation from the motor driver is required (e.g., isolated digital power application) by passing the PWM output signals through transformers. Any of the PWM output signals may be at 100% duty and not changing whenever a motor is required to run steadily at the full load. Coupling with non-alternating signals with a transformer is problematic, so the signals are modulated by the carrier submodule to create an AC waveform, to make the coupling possible.
To configure the carrier submodule, you can call mcpwm_operator_apply_carrier(), and provide configuration structure mcpwm_carrier_config_t:
mcpwm_carrier_config_t::clk_srcsets the clock source of the carrier.mcpwm_carrier_config_t::frequency_hzindicates carrier frequency in Hz. For more information, please refer to Resolution Configuration.mcpwm_carrier_config_t::duty_cycleindicates the duty cycle of the carrier. Note that, there are only 7 supported duty cycles: 0.125, 0.25, 0.375, 0.5, 0.625, 0.75, 0.875.mcpwm_carrier_config_t::first_pulse_duration_usindicates the duration of the first pulse in microseconds. The resolution of the first pulse duration is determined by the carrier frequency you set in themcpwm_carrier_config_t::frequency_hz. The first pulse duration can not be zero, and it has to be at least one period of the carrier. A longer pulse width can help conduct the inductance quicker.mcpwm_carrier_config_t::invert_before_modulateandmcpwm_carrier_config_t::invert_after_modulateset whether to invert the carrier output before and after modulation.
Specifically, the carrier submodule can be disabled by calling mcpwm_operator_apply_carrier() with a NULL configuration.
Faults and Brake Actions
The MCPWM operator is able to sense external signals with information about the failure of the motor, the power driver or any other device connected. These failure signals are encapsulated into MCPWM fault objects.
You should determine possible failure modes of the motor and what action should be performed on detection of a particular fault, e.g., drive all outputs low for a brushed motor, lock current state for a stepper motor, etc. Because of this action, the motor should be put into a safe state to reduce the likelihood of damage caused by the fault.
Set Operator Brake Mode on Fault
The way that MCPWM operator reacts to the fault is called Brake. The MCPWM operator can be configured to perform different brake modes for each fault object by calling mcpwm_operator_set_brake_on_fault(). Specific brake configuration is passed as a structure mcpwm_brake_config_t:
mcpwm_brake_config_t::faultsets which fault the operator should react to.mcpwm_brake_config_t::brake_modesets the brake mode that should be used for the fault. The supported brake modes are listed in themcpwm_operator_brake_mode_t. ForMCPWM_OPER_BRAKE_MODE_CBCmode, the operator recovers itself automatically as long as the fault disappears. You can specify the recovery time inmcpwm_brake_config_t::cbc_recover_on_tezandmcpwm_brake_config_t::cbc_recover_on_tep. ForMCPWM_OPER_BRAKE_MODE_OSTmode, the operator can not recover even though the fault disappears. You have to callmcpwm_operator_recover_from_fault()to manually recover it.
Set Generator Action on Brake Event
A single generator can be configured to perform multiple actions in response to brake events. To achieve this, invoke mcpwm_generator_set_action_on_brake_event() for each desired action. The specific actions available for configuration are defined in mcpwm_gen_brake_event_action_t.
mcpwm_gen_brake_event_action_t::directionspecifies the timer direction. The supported directions are listed inmcpwm_timer_direction_t.mcpwm_gen_brake_event_action_t::brake_modespecifies the brake mode. The supported brake modes are listed in themcpwm_operator_brake_mode_t.mcpwm_gen_brake_event_action_t::actionspecifies the generator action to be taken. The supported actions are listed inmcpwm_generator_action_t.
There is a helper macro MCPWM_GEN_BRAKE_EVENT_ACTION to simplify the construction of a brake event action entry.
Register Fault Event Callbacks
The MCPWM fault detector can inform you when it detects a valid fault or a fault signal disappears. If you have some function that should be called when such an event happens, you should hook your function to the interrupt service routine by calling mcpwm_fault_register_event_callbacks(). The callback function prototype is declared in mcpwm_fault_event_cb_t. All supported event callbacks are listed in the mcpwm_fault_event_callbacks_t:
mcpwm_fault_event_callbacks_t::on_fault_entersets the callback function that will be called when a fault is detected.mcpwm_fault_event_callbacks_t::on_fault_exitsets the callback function that will be called when a fault is cleared.
The callback function is called within the ISR context, so it should not attempt to block. For example, you may make sure that only FreeRTOS APIs with the ISR suffix are called within the function.
The parameter user_data of mcpwm_fault_register_event_callbacks() function is used to save your own context. It is passed to the callback function directly.
This function will lazy the install interrupt service for the MCPWM fault, whereas the service can only be removed in mcpwm_del_fault.
Register Brake Event Callbacks
The MCPWM operator can inform you when it is going to take a brake action. If you have some function that should be called when this event happens, you should hook your function to the interrupt service routine by calling mcpwm_operator_register_event_callbacks(). The callback function prototype is declared in mcpwm_brake_event_cb_t. All supported event callbacks are listed in the mcpwm_operator_event_callbacks_t:
mcpwm_operator_event_callbacks_t::on_brake_cbcsets the callback function that will be called when the operator is going to take a CBC action.mcpwm_operator_event_callbacks_t::on_brake_ostsets the callback function that will be called when the operator is going to take an OST action.
The callback function is called within the ISR context, so it should not attempt to block. For example, you may make sure that only FreeRTOS APIs with the ISR suffix are called within the function.
The parameter user_data of the mcpwm_operator_register_event_callbacks() function is used to save your own context. It will be passed to the callback function directly.
This function will lazy the install interrupt service for the MCPWM operator, whereas the service can only be removed in mcpwm_del_operator.
Generator Force Actions
Software can override generator output level at runtime, by calling mcpwm_generator_set_force_level(). The software force level always has a higher priority than other event actions set in e.g., mcpwm_generator_set_action_on_timer_event().
Set the
levelto -1 means to disable the force action, and the generator's output level will be controlled by the event actions again.Set the
hold_onto true, and the force output level will keep alive until it is removed by assigninglevelto -1.Set the
hole_onto false, the force output level will only be active for a short time, and any upcoming event can override it.
Synchronization
When a sync signal is taken by the MCPWM timer, the timer will be forced into a predefined phase, where the phase is determined by count value and count direction. You can set the sync phase by calling mcpwm_timer_set_phase_on_sync(). The sync phase configuration is defined in mcpwm_timer_sync_phase_config_t structure:
mcpwm_timer_sync_phase_config_t::sync_srcsets the sync signal source. See MCPWM Sync Sources for how to create a sync source object. Specifically, if this is set toNULL, the driver will disable the sync feature for the MCPWM timer.mcpwm_timer_sync_phase_config_t::count_valuesets the count value to load when the sync signal is taken.mcpwm_timer_sync_phase_config_t::directionsets the count direction when the sync signal is taken.
Note
When the MCPWM timer is working in MCPWM_TIMER_COUNT_MODE_UP_DOWN mode, special attention needs to be taken. In this mode, counter range [0 -> peak-1] belongs to the increment phase, and counter range [peak -> 1] belongs to the decrement phase. Thus if you set the mcpwm_timer_sync_phase_config_t::count_value to zero, you may also want to set the mcpwm_timer_sync_phase_config_t::direction to MCPWM_TIMER_DIRECTION_UP. Otherwise, the timer will be continue with the decrement phase, and the count value underflows to peak.
Likewise, the MCPWM Capture Timer can be synced as well. You can set the sync phase for the capture timer by calling mcpwm_capture_timer_set_phase_on_sync(). The sync phase configuration is defined in mcpwm_capture_timer_sync_phase_config_t structure:
mcpwm_capture_timer_sync_phase_config_t::sync_srcsets the sync signal source. See MCPWM Sync Sources for how to create a sync source object. Specifically, if this is set toNULL, the driver will disable the sync feature for the MCPWM capture timer.mcpwm_capture_timer_sync_phase_config_t::count_valuesets the count value to load when the sync signal is taken.mcpwm_capture_timer_sync_phase_config_t::directionsets the count direction when the sync signal is taken. Note that, different from MCPWM Timer, the capture timer can only support one count direction:MCPWM_TIMER_DIRECTION_UP.
Sync Timers by GPIO
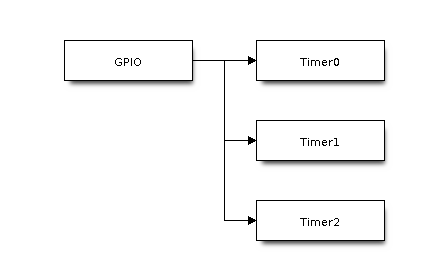
GPIO Sync All MCPWM Timers
static void example_setup_sync_strategy(mcpwm_timer_handle_t timers[])
{
mcpwm_sync_handle_t gpio_sync_source = NULL;
mcpwm_gpio_sync_src_config_t gpio_sync_config = {
.group_id = 0, // GPIO fault should be in the same group of the above timers
.gpio_num = EXAMPLE_SYNC_GPIO,
.flags.active_neg = false, // By default, a posedge pulse can trigger a sync event
};
ESP_ERROR_CHECK(mcpwm_new_gpio_sync_src(&gpio_sync_config, &gpio_sync_source));
mcpwm_timer_sync_phase_config_t sync_phase_config = {
.count_value = 0, // sync phase: target count value
.direction = MCPWM_TIMER_DIRECTION_UP, // sync phase: count direction
.sync_src = gpio_sync_source, // sync source
};
for (int i = 0; i < 3; i++) {
ESP_ERROR_CHECK(mcpwm_timer_set_phase_on_sync(timers[i], &sync_phase_config));
}
}
Capture
The basic functionality of MCPWM capture is to record the time when any pulse edge of the capture signal turns active. Then you can get the pulse width and convert it into other physical quantities like distance or speed in the capture callback function. For example, in the BLDC (Brushless DC, see figure below) scenario, you can use the capture submodule to sense the rotor position from the Hall sensor.
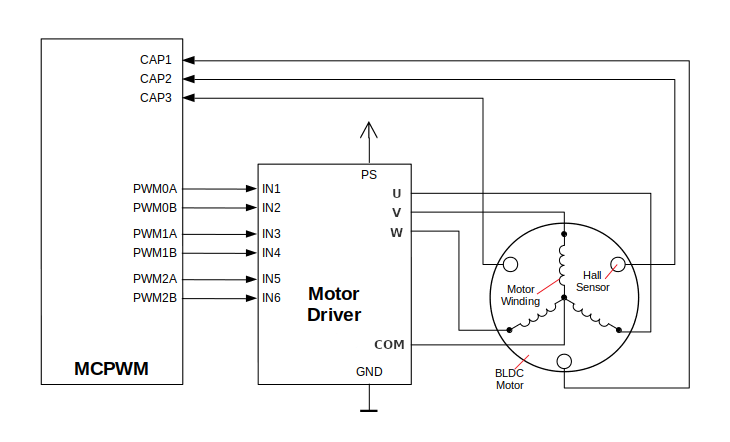
MCPWM BLDC with Hall Sensor
The capture timer is usually connected to several capture channels. Please refer to MCPWM Capture Timer and Channels for more information about resource allocation.
Register Capture Event Callbacks
The MCPWM capture channel can inform you when there is a valid edge detected on the signal. You have to register a callback function to get the timer count value of the captured moment, by calling mcpwm_capture_channel_register_event_callbacks(). The callback function prototype is declared in mcpwm_capture_event_cb_t. All supported capture callbacks are listed in the mcpwm_capture_event_callbacks_t:
mcpwm_capture_event_callbacks_t::on_capsets the callback function for the capture channel when a valid edge is detected.
The callback function provides event-specific data of type mcpwm_capture_event_data_t, so that you can get the edge of the capture signal in mcpwm_capture_event_data_t::cap_edge and the count value of that moment in mcpwm_capture_event_data_t::cap_value. To convert the capture count into a timestamp, you need to know the resolution of the capture timer by calling mcpwm_capture_timer_get_resolution().
The callback function is called within the ISR context, so it should not attempt to block. For example, you may make sure that only FreeRTOS APIs with the ISR suffix are called within the function.
The parameter user_data of mcpwm_capture_channel_register_event_callbacks() function is used to save your context. It is passed to the callback function directly.
This function will lazy install interrupt service for the MCPWM capture channel, whereas the service can only be removed in mcpwm_del_capture_channel.
Enable and Disable Capture Channel
The capture channel is not enabled after allocation by mcpwm_new_capture_channel(). You should call mcpwm_capture_channel_enable() and mcpwm_capture_channel_disable() accordingly to enable or disable the channel. If the interrupt service is lazy installed during registering event callbacks for the channel in mcpwm_capture_channel_register_event_callbacks(), mcpwm_capture_channel_enable() will enable the interrupt service as well.
Enable and Disable Capture Timer
Before doing IO control to the capture timer, you need to enable the timer first, by calling mcpwm_capture_timer_enable(). Internally, this function:
switches the capture timer state from init to enable.
acquires a proper power management lock if a specific clock source (e.g., APB clock) is selected. See also Power Management for more information.
On the contrary, calling mcpwm_capture_timer_disable() will put the timer driver back to init state, and release the power management lock.
Start and Stop Capture Timer
The basic IO operation of a capture timer is to start and stop. Calling mcpwm_capture_timer_start() can start the timer and calling mcpwm_capture_timer_stop() can stop the timer immediately.
Trigger a Software Capture Event
Sometimes, the software also wants to trigger a "fake" capture event. The mcpwm_capture_channel_trigger_soft_catch() is provided for that purpose. Please note that, even though it is a "fake" capture event, it can still cause an interrupt, thus your capture event callback function gets invoked as well.
Get the Last Captured Value
If you don't want to process the captured value in the capture event callback function, but want to process it in other places, you can call mcpwm_capture_get_latched_value() to get the last captured value.
ETM Event and Task
MCPWM timer and comparator can generate events that can be connected to the ETM module. The event types for the timer and comparator are listed in mcpwm_timer_etm_event_type_t and mcpwm_comparator_etm_event_type_t respectively. You can get the ETM event handle by calling mcpwm_timer_new_etm_event() or mcpwm_comparator_new_etm_event().
For how to connect the MCPWM events to an ETM channel, please refer to the ETM documentation.
Power Management
When power management is enabled (i.e., CONFIG_PM_ENABLE is on), the system will adjust the PLL and APB frequency before going into Light-sleep, thus potentially changing the period of an MCPWM timers' counting step and leading to inaccurate time-keeping.
However, the driver can prevent the system from going into Light-sleep by acquiring a power management lock of type ESP_PM_NO_LIGHT_SLEEP. Whenever the driver creates an MCPWM timer instance that has selected PLL as its clock source, the driver guarantees that the power management lock is acquired when enabling the timer by mcpwm_timer_enable(). On the contrary, the driver releases the lock when mcpwm_timer_disable() is called for that timer.
Likewise, whenever the driver creates an MCPWM capture timer instance, the driver guarantees that the power management lock is acquired when enabling the timer by mcpwm_capture_timer_enable(). And releases the lock in mcpwm_capture_timer_disable().
ESP32-C6 supports to retain the MCPWM register context before entering Light-sleep and restore them after woke up. Which means you don't have to re-init the MCPWM driver after the Light-sleep.
This feature can be enabled by setting the flag mcpwm_timer_config_t::flags::allow_pd or mcpwm_capture_timer_config_t::flags::allow_pd. It will allow the system to power down the MCPWM in Light-sleep, meanwhile save the MCPWM register context. It can help to save more power consumption with some extra cost of the memory.
Resolution Configuration
The MCPWM group has clock dividers and some sub-modules will have their own clock dividers. The final clock frequency of the sub-module depends on the group clock divider and its own divider (if any). The group clock divider affects all submodules. When configuring the clock frequency (also called resolution) of an MCPWM submodule, the driver sets the divider according to the following rules:
If the clock frequency of the submodule can be divisible by the clock source, the frequency of the submodule is prioritized to ensure the accuracy of the submodule.
If it cannot be divisible by the clock source, the group clock is guaranteed to have the highest frequency possible, and the submodule frequency is adjusted to the closest frequency that can be divisible by the clock source.
When multiple MCPWM submodules coexist, you need to consider whether there is a clock divider conflict. When there is a group clock divider conflict, try adjusting the submodule allocation order. See [TRM] for details on group frequency divider and submodule frequency divider ranges.
IRAM Safe
By default, the MCPWM interrupt will be deferred when the Cache is disabled for reasons like writing/erasing Flash. Thus the event callback functions will not get executed in time, which is not expected in a real-time application.
There is a Kconfig option CONFIG_MCPWM_ISR_CACHE_SAFE that:
enables the interrupt to be serviced even when the cache is disabled
places all functions used by the ISR into IRAM [2]
places the driver object into DRAM (in case it is mapped to PSRAM by accident)
This allows the interrupt to run while the cache is disabled but comes at the cost of increased IRAM consumption.
There is another Kconfig option CONFIG_MCPWM_CTRL_FUNC_IN_IRAM that can put commonly used IO control functions into IRAM as well. So, these functions can also be executable when the cache is disabled. The IO control function is as follows:
Thread Safety
The factory functions like mcpwm_new_timer() are guaranteed to be thread-safe by the driver, which means, you can call it from different RTOS tasks without protection by extra locks.
The following function is allowed to run under the ISR context, as the driver uses a critical section to prevent them from being called concurrently in the task and ISR.
Other functions that are not related to Resource Allocation and Initialization, are not thread-safe. Thus, you should avoid calling them in different tasks without mutex protection.
Kconfig Options
CONFIG_MCPWM_ISR_CACHE_SAFE controls whether the default ISR handler can work when the cache is disabled, see IRAM Safe for more information.
CONFIG_MCPWM_CTRL_FUNC_IN_IRAM controls where to place the MCPWM control functions (IRAM or flash), see IRAM Safe for more information.
CONFIG_MCPWM_ENABLE_DEBUG_LOG is used to enable the debug log output. Enabling this option will increase the firmware binary size.
Application Examples
peripherals/mcpwm/mcpwm_bdc_speed_control demonstrates how to drive a brushed DC motor using two specific PWM signals, measure the motor speed with a photoelectric encoder, and maintain a stable motor speed using a simple PID algorithm.
peripherals/mcpwm/mcpwm_bldc_hall_control demonstrates how to use the MCPWM peripheral to control a BLDC motor using a six-step commutation scheme, with the motor's spin direction and speed being adjusted based on the readings from a Hall sensor.
peripherals/mcpwm/mcpwm_capture_hc_sr04 demonstrates how to use the MCPWM peripheral's capture module to decode the pulse width signals from an HC-SR04 sonar sensor, which can measure distance based on the width of the pulse.
peripherals/mcpwm/mcpwm_foc_svpwm_open_loop demonstrates how to use the MCPWM peripheral to generate three pairs of PWM signals for Field-Oriented Control (FOC), which can be used to drive a BLDC or PMSM motor, or a three-phase power inverter, using an open-loop FOC algorithm.
peripherals/mcpwm/mcpwm_servo_control demonstrates how to control a typical RC Servo by sending a PWM signal using the MCPWM driver, with the servo rotating from -60° to 60° and then turning back again.
peripherals/mcpwm/mcpwm_sync demonstrates how to generate three PWMs in perfect synchronization using MCPWM timers, with options to synchronize the timers via GPIO, Timer TEZ, or software.
API Reference
MCPWM APIs are divided into the following sections:
Timer API
Header File
This header file can be included with:
#include "driver/mcpwm_timer.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_timer(const mcpwm_timer_config_t *config, mcpwm_timer_handle_t *ret_timer)
Create MCPWM timer.
- Parameters:
config -- [in] MCPWM timer configuration
ret_timer -- [out] Returned MCPWM timer handle
- Returns:
ESP_OK: Create MCPWM timer successfully
ESP_ERR_INVALID_ARG: Create MCPWM timer failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM timer failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM timer failed because all hardware timers are used up and no more free one
ESP_FAIL: Create MCPWM timer failed because of other error
-
esp_err_t mcpwm_del_timer(mcpwm_timer_handle_t timer)
Delete MCPWM timer.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- Returns:
ESP_OK: Delete MCPWM timer successfully
ESP_ERR_INVALID_ARG: Delete MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Delete MCPWM timer failed because timer is not in init state
ESP_FAIL: Delete MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_set_period(mcpwm_timer_handle_t timer, uint32_t period_ticks)
Set a new period for MCPWM timer.
Note
If
mcpwm_timer_config_t::update_period_on_emptyandmcpwm_timer_config_t::update_period_on_syncare not set, the new period will take effect immediately. Otherwise, the new period will take effect when timer counts to zero or on sync event.Note
You may need to use
mcpwm_comparator_set_compare_valueto set a new compare value for MCPWM comparator in order to keep the same PWM duty cycle.- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timerperiod_ticks -- [in] New period in count ticks
- Returns:
ESP_OK: Set new period for MCPWM timer successfully
ESP_ERR_INVALID_ARG: Set new period for MCPWM timer failed because of invalid argument
ESP_FAIL: Set new period for MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_enable(mcpwm_timer_handle_t timer)
Enable MCPWM timer.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- Returns:
ESP_OK: Enable MCPWM timer successfully
ESP_ERR_INVALID_ARG: Enable MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM timer failed because timer is enabled already
ESP_FAIL: Enable MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_disable(mcpwm_timer_handle_t timer)
Disable MCPWM timer.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()- Returns:
ESP_OK: Disable MCPWM timer successfully
ESP_ERR_INVALID_ARG: Disable MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM timer failed because timer is disabled already
ESP_FAIL: Disable MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_start_stop(mcpwm_timer_handle_t timer, mcpwm_timer_start_stop_cmd_t command)
Send specific start/stop commands to MCPWM timer.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()command -- [in] Supported command list for MCPWM timer
- Returns:
ESP_OK: Start or stop MCPWM timer successfully
ESP_ERR_INVALID_ARG: Start or stop MCPWM timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Start or stop MCPWM timer failed because timer is not enabled
ESP_FAIL: Start or stop MCPWM timer failed because of other error
-
esp_err_t mcpwm_timer_register_event_callbacks(mcpwm_timer_handle_t timer, const mcpwm_timer_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM timer.
Note
The first call to this function needs to be before the call to
mcpwm_timer_enableNote
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE: Set event callbacks failed because timer is not in init state
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_timer_set_phase_on_sync(mcpwm_timer_handle_t timer, const mcpwm_timer_sync_phase_config_t *config)
Set sync phase for MCPWM timer.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()config -- [in] MCPWM timer sync phase configuration
- Returns:
ESP_OK: Set sync phase for MCPWM timer successfully
ESP_ERR_INVALID_ARG: Set sync phase for MCPWM timer failed because of invalid argument
ESP_FAIL: Set sync phase for MCPWM timer failed because of other error
Structures
-
struct mcpwm_timer_event_callbacks_t
Group of supported MCPWM timer event callbacks.
Note
The callbacks are all running under ISR environment
Public Members
-
mcpwm_timer_event_cb_t on_full
callback function when MCPWM timer counts to peak value
-
mcpwm_timer_event_cb_t on_empty
callback function when MCPWM timer counts to zero
-
mcpwm_timer_event_cb_t on_stop
callback function when MCPWM timer stops
-
mcpwm_timer_event_cb_t on_full
-
struct mcpwm_timer_config_t
MCPWM timer configuration.
Public Members
-
int group_id
Specify from which group to allocate the MCPWM timer
-
mcpwm_timer_clock_source_t clk_src
MCPWM timer clock source
-
uint32_t resolution_hz
Counter resolution in Hz The step size of each count tick equals to (1 / resolution_hz) seconds
-
mcpwm_timer_count_mode_t count_mode
Count mode
-
uint32_t period_ticks
Number of count ticks within a period. For up-down mode, the timer peak value is half of the period_ticks
-
int intr_priority
MCPWM timer interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
struct mcpwm_timer_config_t::extra_mcpwm_timer_flags flags
Extra configuration flags for timer
-
struct extra_mcpwm_timer_flags
Extra configuration flags for MCPWM timer.
Public Members
-
uint32_t update_period_on_empty
Whether to update period when timer counts to zero
-
uint32_t update_period_on_sync
Whether to update period on sync event
-
uint32_t allow_pd
Set to allow power down. When this flag set, the driver will backup/restore the MCPWM registers before/after entering/exist sleep mode. By this approach, the system can power off MCPWM's power domain. This can save power, but at the expense of more RAM being consumed.
-
uint32_t update_period_on_empty
-
int group_id
-
struct mcpwm_timer_sync_phase_config_t
MCPWM Timer sync phase configuration.
Public Members
-
mcpwm_sync_handle_t sync_src
The sync event source. Set to NULL will disable the timer being synced by others
-
uint32_t count_value
The count value that should lock to upon sync event
-
mcpwm_timer_direction_t direction
The count direction that should lock to upon sync event
-
mcpwm_sync_handle_t sync_src
Operator API
Header File
This header file can be included with:
#include "driver/mcpwm_oper.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_operator(const mcpwm_operator_config_t *config, mcpwm_oper_handle_t *ret_oper)
Create MCPWM operator.
- Parameters:
config -- [in] MCPWM operator configuration
ret_oper -- [out] Returned MCPWM operator handle
- Returns:
ESP_OK: Create MCPWM operator successfully
ESP_ERR_INVALID_ARG: Create MCPWM operator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM operator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM operator failed because can't find free resource
ESP_FAIL: Create MCPWM operator failed because of other error
-
esp_err_t mcpwm_del_operator(mcpwm_oper_handle_t oper)
Delete MCPWM operator.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()- Returns:
ESP_OK: Delete MCPWM operator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM operator failed because of invalid argument
ESP_FAIL: Delete MCPWM operator failed because of other error
-
esp_err_t mcpwm_operator_connect_timer(mcpwm_oper_handle_t oper, mcpwm_timer_handle_t timer)
Connect MCPWM operator and timer, so that the operator can be driven by the timer.
- Parameters:
oper -- [in] MCPWM operator handle, allocated by
mcpwm_new_operator()timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()
- Returns:
ESP_OK: Connect MCPWM operator and timer successfully
ESP_ERR_INVALID_ARG: Connect MCPWM operator and timer failed because of invalid argument
ESP_FAIL: Connect MCPWM operator and timer failed because of other error
-
esp_err_t mcpwm_operator_set_brake_on_fault(mcpwm_oper_handle_t oper, const mcpwm_brake_config_t *config)
Set brake method for MCPWM operator.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM brake configuration
- Returns:
ESP_OK: Set trip for operator successfully
ESP_ERR_INVALID_ARG: Set trip for operator failed because of invalid argument
ESP_FAIL: Set trip for operator failed because of other error
-
esp_err_t mcpwm_operator_recover_from_fault(mcpwm_oper_handle_t oper, mcpwm_fault_handle_t fault)
Try to make the operator recover from fault.
Note
To recover from fault or escape from trip, you make sure the fault signal has disappeared already. Otherwise the recovery can't succeed.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()fault -- [in] MCPWM fault handle
- Returns:
ESP_OK: Recover from fault successfully
ESP_ERR_INVALID_ARG: Recover from fault failed because of invalid argument
ESP_ERR_INVALID_STATE: Recover from fault failed because the fault source is still active
ESP_FAIL: Recover from fault failed because of other error
-
esp_err_t mcpwm_operator_register_event_callbacks(mcpwm_oper_handle_t oper, const mcpwm_operator_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM operator.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- Parameters:
oper -- [in] MCPWM operator handle, allocated by
mcpwm_new_operator()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_operator_apply_carrier(mcpwm_oper_handle_t oper, const mcpwm_carrier_config_t *config)
Apply carrier feature for MCPWM operator.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM carrier specific configuration
- Returns:
ESP_OK: Set carrier for operator successfully
ESP_ERR_INVALID_ARG: Set carrier for operator failed because of invalid argument
ESP_FAIL: Set carrier for operator failed because of other error
Structures
-
struct mcpwm_operator_config_t
MCPWM operator configuration.
Public Members
-
int group_id
Specify from which group to allocate the MCPWM operator
-
int intr_priority
MCPWM operator interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
struct mcpwm_operator_config_t::extra_mcpwm_operator_flags flags
Extra configuration flags for operator
-
struct extra_mcpwm_operator_flags
Extra configuration flags for operator.
Public Members
-
uint32_t update_gen_action_on_tez
Whether to update generator action when timer counts to zero
-
uint32_t update_gen_action_on_tep
Whether to update generator action when timer counts to peak
-
uint32_t update_gen_action_on_sync
Whether to update generator action on sync event
-
uint32_t update_dead_time_on_tez
Whether to update dead time when timer counts to zero
-
uint32_t update_dead_time_on_tep
Whether to update dead time when timer counts to peak
-
uint32_t update_dead_time_on_sync
Whether to update dead time on sync event
-
uint32_t update_gen_action_on_tez
-
int group_id
-
struct mcpwm_brake_config_t
MCPWM brake configuration structure.
Public Members
-
mcpwm_fault_handle_t fault
Which fault causes the operator to brake
-
mcpwm_operator_brake_mode_t brake_mode
Brake mode
-
uint32_t cbc_recover_on_tez
Recovery CBC brake state on tez event
-
uint32_t cbc_recover_on_tep
Recovery CBC brake state on tep event
-
struct mcpwm_brake_config_t flags
Extra flags for brake configuration
-
mcpwm_fault_handle_t fault
-
struct mcpwm_operator_event_callbacks_t
Group of supported MCPWM operator event callbacks.
Note
The callbacks are all running under ISR environment
Public Members
-
mcpwm_brake_event_cb_t on_brake_cbc
callback function when mcpwm operator brakes in CBC
-
mcpwm_brake_event_cb_t on_brake_ost
callback function when mcpwm operator brakes in OST
-
mcpwm_brake_event_cb_t on_brake_cbc
-
struct mcpwm_carrier_config_t
MCPWM carrier configuration structure.
Public Members
-
mcpwm_carrier_clock_source_t clk_src
MCPWM carrier clock source
-
uint32_t frequency_hz
Carrier frequency in Hz
-
uint32_t first_pulse_duration_us
The duration of the first PWM pulse, in us
-
float duty_cycle
Carrier duty cycle
-
uint32_t invert_before_modulate
Invert the raw signal
-
uint32_t invert_after_modulate
Invert the modulated signal
-
struct mcpwm_carrier_config_t flags
Extra flags for carrier configuration
-
mcpwm_carrier_clock_source_t clk_src
Comparator API
Header File
This header file can be included with:
#include "driver/mcpwm_cmpr.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_comparator(mcpwm_oper_handle_t oper, const mcpwm_comparator_config_t *config, mcpwm_cmpr_handle_t *ret_cmpr)
Create MCPWM comparator.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator(), the new comparator will be allocated from this operatorconfig -- [in] MCPWM comparator configuration
ret_cmpr -- [out] Returned MCPWM comparator
- Returns:
ESP_OK: Create MCPWM comparator successfully
ESP_ERR_INVALID_ARG: Create MCPWM comparator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM comparator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM comparator failed because can't find free resource
ESP_FAIL: Create MCPWM comparator failed because of other error
-
esp_err_t mcpwm_del_comparator(mcpwm_cmpr_handle_t cmpr)
Delete MCPWM comparator.
- Parameters:
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()- Returns:
ESP_OK: Delete MCPWM comparator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM comparator failed because of invalid argument
ESP_FAIL: Delete MCPWM comparator failed because of other error
-
esp_err_t mcpwm_comparator_register_event_callbacks(mcpwm_cmpr_handle_t cmpr, const mcpwm_comparator_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM comparator.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- Parameters:
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_comparator_set_compare_value(mcpwm_cmpr_handle_t cmpr, uint32_t cmp_ticks)
Set MCPWM comparator's compare value.
- Parameters:
cmpr -- [in] MCPWM comparator handle, allocated by
mcpwm_new_comparator()cmp_ticks -- [in] The new compare value
- Returns:
ESP_OK: Set MCPWM compare value successfully
ESP_ERR_INVALID_ARG: Set MCPWM compare value failed because of invalid argument (e.g. the cmp_ticks is out of range)
ESP_ERR_INVALID_STATE: Set MCPWM compare value failed because the operator doesn't have a timer connected
ESP_FAIL: Set MCPWM compare value failed because of other error
Structures
-
struct mcpwm_comparator_config_t
MCPWM comparator configuration.
Public Members
-
int intr_priority
MCPWM comparator interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
struct mcpwm_comparator_config_t::extra_mcpwm_comparator_flags flags
Extra configuration flags for comparator
-
struct extra_mcpwm_comparator_flags
Extra configuration flags for comparator.
-
int intr_priority
-
struct mcpwm_comparator_event_callbacks_t
Group of supported MCPWM compare event callbacks.
Note
The callbacks are all running under ISR environment
Public Members
-
mcpwm_compare_event_cb_t on_reach
ISR callback function which would be invoked when counter reaches compare value
-
mcpwm_compare_event_cb_t on_reach
Generator API
Header File
This header file can be included with:
#include "driver/mcpwm_gen.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_generator(mcpwm_oper_handle_t oper, const mcpwm_generator_config_t *config, mcpwm_gen_handle_t *ret_gen)
Allocate MCPWM generator from given operator.
- Parameters:
oper -- [in] MCPWM operator, allocated by
mcpwm_new_operator()config -- [in] MCPWM generator configuration
ret_gen -- [out] Returned MCPWM generator
- Returns:
ESP_OK: Create MCPWM generator successfully
ESP_ERR_INVALID_ARG: Create MCPWM generator failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM generator failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM generator failed because can't find free resource
ESP_FAIL: Create MCPWM generator failed because of other error
-
esp_err_t mcpwm_del_generator(mcpwm_gen_handle_t gen)
Delete MCPWM generator.
- Parameters:
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()- Returns:
ESP_OK: Delete MCPWM generator successfully
ESP_ERR_INVALID_ARG: Delete MCPWM generator failed because of invalid argument
ESP_FAIL: Delete MCPWM generator failed because of other error
-
esp_err_t mcpwm_generator_set_force_level(mcpwm_gen_handle_t gen, int level, bool hold_on)
Set force level for MCPWM generator.
Note
The force level will be applied to the generator immediately, regardless any other events that would change the generator's behaviour.
Note
If the
hold_onis true, the force level will retain forever, until user removes the force level by setting the force level to-1.Note
If the
hold_onis false, the force level can be overridden by the next event action.Note
The force level set by this function can be inverted by GPIO matrix or dead-time module. So the level set here doesn't equal to the final output level.
- Parameters:
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()level -- [in] GPIO level to be applied to MCPWM generator, specially, -1 means to remove the force level
hold_on -- [in] Whether the forced PWM level should retain (i.e. will remain unchanged until manually remove the force level)
- Returns:
ESP_OK: Set force level for MCPWM generator successfully
ESP_ERR_INVALID_ARG: Set force level for MCPWM generator failed because of invalid argument
ESP_FAIL: Set force level for MCPWM generator failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_timer_event(mcpwm_gen_handle_t gen, mcpwm_gen_timer_event_action_t ev_act)
Set generator action on MCPWM timer event.
- Parameters:
gen -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM timer event action, can be constructed by
MCPWM_GEN_TIMER_EVENT_ACTIONhelper macro
- Returns:
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_ERR_INVALID_STATE: Set generator action failed because of timer is not connected to operator
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_compare_event(mcpwm_gen_handle_t generator, mcpwm_gen_compare_event_action_t ev_act)
Set generator action on MCPWM compare event.
- Parameters:
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM compare event action, can be constructed by
MCPWM_GEN_COMPARE_EVENT_ACTIONhelper macro
- Returns:
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_brake_event(mcpwm_gen_handle_t generator, mcpwm_gen_brake_event_action_t ev_act)
Set generator action on MCPWM brake event.
- Parameters:
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM brake event action, can be constructed by
MCPWM_GEN_BRAKE_EVENT_ACTIONhelper macro
- Returns:
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_fault_event(mcpwm_gen_handle_t generator, mcpwm_gen_fault_event_action_t ev_act)
Set generator action on MCPWM Fault event.
- Parameters:
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM trigger event action, can be constructed by
MCPWM_GEN_FAULT_EVENT_ACTIONhelper macro
- Returns:
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_action_on_sync_event(mcpwm_gen_handle_t generator, mcpwm_gen_sync_event_action_t ev_act)
Set generator action on MCPWM Sync event.
Note
The trigger only support one sync action, regardless of the kinds. Should not call this function more than once.
- Parameters:
generator -- [in] MCPWM generator handle, allocated by
mcpwm_new_generator()ev_act -- [in] MCPWM trigger event action, can be constructed by
MCPWM_GEN_SYNC_EVENT_ACTIONhelper macro
- Returns:
ESP_OK: Set generator action successfully
ESP_ERR_INVALID_ARG: Set generator action failed because of invalid argument
ESP_FAIL: Set generator action failed because of other error
-
esp_err_t mcpwm_generator_set_dead_time(mcpwm_gen_handle_t in_generator, mcpwm_gen_handle_t out_generator, const mcpwm_dead_time_config_t *config)
Set dead time for MCPWM generator.
Note
Due to a hardware limitation, you can't set rising edge delay for both MCPWM generator 0 and 1 at the same time, otherwise, there will be a conflict inside the dead time module. The same goes for the falling edge setting. But you can set both the rising edge and falling edge delay for the same MCPWM generator.
- Parameters:
in_generator -- [in] MCPWM generator, before adding the dead time
out_generator -- [in] MCPWM generator, after adding the dead time
config -- [in] MCPWM dead time configuration
- Returns:
ESP_OK: Set dead time for MCPWM generator successfully
ESP_ERR_INVALID_ARG: Set dead time for MCPWM generator failed because of invalid argument
ESP_ERR_INVALID_STATE: Set dead time for MCPWM generator failed because of invalid state (e.g. delay module is already in use by other generator)
ESP_FAIL: Set dead time for MCPWM generator failed because of other error
Structures
-
struct mcpwm_generator_config_t
MCPWM generator configuration.
Public Members
-
int gen_gpio_num
The GPIO number used to output the PWM signal
-
struct mcpwm_generator_config_t::extra_mcpwm_generator_flags flags
Extra configuration flags for generator
-
int gen_gpio_num
-
struct mcpwm_gen_timer_event_action_t
Generator action on specific timer event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_timer_event_t event
Timer event
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_compare_event_action_t
Generator action on specific comparator event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_cmpr_handle_t comparator
Comparator handle
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_brake_event_action_t
Generator action on specific brake event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_operator_brake_mode_t brake_mode
Brake mode
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_fault_event_action_t
Generator action on specific fault event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_fault_handle_t fault
Which fault as the trigger. Only support GPIO fault
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_gen_sync_event_action_t
Generator action on specific sync event.
Public Members
-
mcpwm_timer_direction_t direction
Timer direction
-
mcpwm_sync_handle_t sync
Which sync as the trigger
-
mcpwm_generator_action_t action
Generator action should perform
-
mcpwm_timer_direction_t direction
-
struct mcpwm_dead_time_config_t
MCPWM dead time configuration structure.
Public Members
-
uint32_t posedge_delay_ticks
delay time applied to rising edge, 0 means no rising delay time
-
uint32_t negedge_delay_ticks
delay time applied to falling edge, 0 means no falling delay time
-
uint32_t invert_output
Invert the signal after applied the dead time
-
struct mcpwm_dead_time_config_t flags
Extra flags for dead time configuration
-
uint32_t posedge_delay_ticks
Macros
-
MCPWM_GEN_TIMER_EVENT_ACTION(dir, ev, act)
Help macros to construct a mcpwm_gen_timer_event_action_t entry.
-
MCPWM_GEN_COMPARE_EVENT_ACTION(dir, cmp, act)
Help macros to construct a mcpwm_gen_compare_event_action_t entry.
-
MCPWM_GEN_BRAKE_EVENT_ACTION(dir, mode, act)
Help macros to construct a mcpwm_gen_brake_event_action_t entry.
-
MCPWM_GEN_FAULT_EVENT_ACTION(dir, flt, act)
Help macros to construct a mcpwm_gen_fault_event_action_t entry.
-
MCPWM_GEN_SYNC_EVENT_ACTION(dir, syn, act)
Help macros to construct a mcpwm_gen_sync_event_action_t entry.
Fault API
Header File
This header file can be included with:
#include "driver/mcpwm_fault.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_gpio_fault(const mcpwm_gpio_fault_config_t *config, mcpwm_fault_handle_t *ret_fault)
Create MCPWM GPIO fault.
- Parameters:
config -- [in] MCPWM GPIO fault configuration
ret_fault -- [out] Returned GPIO fault handle
- Returns:
ESP_OK: Create MCPWM GPIO fault successfully
ESP_ERR_INVALID_ARG: Create MCPWM GPIO fault failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM GPIO fault failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM GPIO fault failed because can't find free resource
ESP_FAIL: Create MCPWM GPIO fault failed because of other error
-
esp_err_t mcpwm_new_soft_fault(const mcpwm_soft_fault_config_t *config, mcpwm_fault_handle_t *ret_fault)
Create MCPWM software fault.
- Parameters:
config -- [in] MCPWM software fault configuration
ret_fault -- [out] Returned software fault handle
- Returns:
ESP_OK: Create MCPWM software fault successfully
ESP_ERR_INVALID_ARG: Create MCPWM software fault failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM software fault failed because out of memory
ESP_FAIL: Create MCPWM software fault failed because of other error
-
esp_err_t mcpwm_del_fault(mcpwm_fault_handle_t fault)
Delete MCPWM fault.
- Parameters:
fault -- [in] MCPWM fault handle allocated by
mcpwm_new_gpio_fault()ormcpwm_new_soft_fault()- Returns:
ESP_OK: Delete MCPWM fault successfully
ESP_ERR_INVALID_ARG: Delete MCPWM fault failed because of invalid argument
ESP_FAIL: Delete MCPWM fault failed because of other error
-
esp_err_t mcpwm_soft_fault_activate(mcpwm_fault_handle_t fault)
Activate the software fault, trigger the fault event for once.
- Parameters:
fault -- [in] MCPWM soft fault, allocated by
mcpwm_new_soft_fault()- Returns:
ESP_OK: Trigger MCPWM software fault event successfully
ESP_ERR_INVALID_ARG: Trigger MCPWM software fault event failed because of invalid argument
ESP_FAIL: Trigger MCPWM software fault event failed because of other error
-
esp_err_t mcpwm_fault_register_event_callbacks(mcpwm_fault_handle_t fault, const mcpwm_fault_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM fault.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- Parameters:
fault -- [in] MCPWM GPIO fault handle, allocated by
mcpwm_new_gpio_fault()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_FAIL: Set event callbacks failed because of other error
Structures
-
struct mcpwm_gpio_fault_config_t
MCPWM GPIO fault configuration structure.
Public Members
-
int group_id
In which MCPWM group that the GPIO fault belongs to
-
int intr_priority
MCPWM GPIO fault interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
int gpio_num
GPIO used by the fault signal
-
struct mcpwm_gpio_fault_config_t::extra_mcpwm_gpio_fault_flags flags
Extra configuration flags for GPIO fault
-
int group_id
-
struct mcpwm_soft_fault_config_t
MCPWM software fault configuration structure.
-
struct mcpwm_fault_event_callbacks_t
Group of supported MCPWM fault event callbacks.
Note
The callbacks are all running under ISR environment
Public Members
-
mcpwm_fault_event_cb_t on_fault_enter
ISR callback function that would be invoked when fault signal becomes active
-
mcpwm_fault_event_cb_t on_fault_exit
ISR callback function that would be invoked when fault signal becomes inactive
-
mcpwm_fault_event_cb_t on_fault_enter
Sync API
Header File
This header file can be included with:
#include "driver/mcpwm_sync.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_timer_sync_src(mcpwm_timer_handle_t timer, const mcpwm_timer_sync_src_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM timer sync source.
- Parameters:
timer -- [in] MCPWM timer handle, allocated by
mcpwm_new_timer()config -- [in] MCPWM timer sync source configuration
ret_sync -- [out] Returned MCPWM sync handle
- Returns:
ESP_OK: Create MCPWM timer sync source successfully
ESP_ERR_INVALID_ARG: Create MCPWM timer sync source failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM timer sync source failed because out of memory
ESP_ERR_INVALID_STATE: Create MCPWM timer sync source failed because the timer has created a sync source before
ESP_FAIL: Create MCPWM timer sync source failed because of other error
-
esp_err_t mcpwm_new_gpio_sync_src(const mcpwm_gpio_sync_src_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM GPIO sync source.
- Parameters:
config -- [in] MCPWM GPIO sync source configuration
ret_sync -- [out] Returned MCPWM GPIO sync handle
- Returns:
ESP_OK: Create MCPWM GPIO sync source successfully
ESP_ERR_INVALID_ARG: Create MCPWM GPIO sync source failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM GPIO sync source failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM GPIO sync source failed because can't find free resource
ESP_FAIL: Create MCPWM GPIO sync source failed because of other error
-
esp_err_t mcpwm_new_soft_sync_src(const mcpwm_soft_sync_config_t *config, mcpwm_sync_handle_t *ret_sync)
Create MCPWM software sync source.
- Parameters:
config -- [in] MCPWM software sync source configuration
ret_sync -- [out] Returned software sync handle
- Returns:
ESP_OK: Create MCPWM software sync successfully
ESP_ERR_INVALID_ARG: Create MCPWM software sync failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM software sync failed because out of memory
ESP_FAIL: Create MCPWM software sync failed because of other error
-
esp_err_t mcpwm_del_sync_src(mcpwm_sync_handle_t sync)
Delete MCPWM sync source.
- Parameters:
sync -- [in] MCPWM sync handle, allocated by
mcpwm_new_timer_sync_src()ormcpwm_new_gpio_sync_src()ormcpwm_new_soft_sync_src()- Returns:
ESP_OK: Delete MCPWM sync source successfully
ESP_ERR_INVALID_ARG: Delete MCPWM sync source failed because of invalid argument
ESP_FAIL: Delete MCPWM sync source failed because of other error
-
esp_err_t mcpwm_soft_sync_activate(mcpwm_sync_handle_t sync)
Activate the software sync, trigger the sync event for once.
- Parameters:
sync -- [in] MCPWM soft sync handle, allocated by
mcpwm_new_soft_sync_src()- Returns:
ESP_OK: Trigger MCPWM software sync event successfully
ESP_ERR_INVALID_ARG: Trigger MCPWM software sync event failed because of invalid argument
ESP_FAIL: Trigger MCPWM software sync event failed because of other error
Structures
-
struct mcpwm_timer_sync_src_config_t
MCPWM timer sync source configuration.
Public Members
-
mcpwm_timer_event_t timer_event
Timer event, upon which MCPWM timer will generate the sync signal
-
struct mcpwm_timer_sync_src_config_t::extra_mcpwm_timer_sync_src_flags flags
Extra configuration flags for timer sync source
-
mcpwm_timer_event_t timer_event
-
struct mcpwm_gpio_sync_src_config_t
MCPWM GPIO sync source configuration.
Public Members
-
int group_id
MCPWM group ID
-
int gpio_num
GPIO used by sync source
-
struct mcpwm_gpio_sync_src_config_t::extra_mcpwm_gpio_sync_src_flags flags
Extra configuration flags for GPIO sync source
-
int group_id
-
struct mcpwm_soft_sync_config_t
MCPWM software sync configuration structure.
Capture API
Header File
This header file can be included with:
#include "driver/mcpwm_cap.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_new_capture_timer(const mcpwm_capture_timer_config_t *config, mcpwm_cap_timer_handle_t *ret_cap_timer)
Create MCPWM capture timer.
- Parameters:
config -- [in] MCPWM capture timer configuration
ret_cap_timer -- [out] Returned MCPWM capture timer handle
- Returns:
ESP_OK: Create MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Create MCPWM capture timer failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM capture timer failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM capture timer failed because can't find free resource
ESP_FAIL: Create MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_del_capture_timer(mcpwm_cap_timer_handle_t cap_timer)
Delete MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- Returns:
ESP_OK: Delete MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Delete MCPWM capture timer failed because of invalid argument
ESP_FAIL: Delete MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_enable(mcpwm_cap_timer_handle_t cap_timer)
Enable MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer handle, allocated by
mcpwm_new_capture_timer()- Returns:
ESP_OK: Enable MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Enable MCPWM capture timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM capture timer failed because timer is enabled already
ESP_FAIL: Enable MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_disable(mcpwm_cap_timer_handle_t cap_timer)
Disable MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer handle, allocated by
mcpwm_new_capture_timer()- Returns:
ESP_OK: Disable MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Disable MCPWM capture timer failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM capture timer failed because timer is disabled already
ESP_FAIL: Disable MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_start(mcpwm_cap_timer_handle_t cap_timer)
Start MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- Returns:
ESP_OK: Start MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Start MCPWM capture timer failed because of invalid argument
ESP_FAIL: Start MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_stop(mcpwm_cap_timer_handle_t cap_timer)
Stop MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()- Returns:
ESP_OK: Stop MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Stop MCPWM capture timer failed because of invalid argument
ESP_FAIL: Stop MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_capture_timer_get_resolution(mcpwm_cap_timer_handle_t cap_timer, uint32_t *out_resolution)
Get MCPWM capture timer resolution, in Hz.
- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()out_resolution -- [out] Returned capture timer resolution, in Hz
- Returns:
ESP_OK: Get capture timer resolution successfully
ESP_ERR_INVALID_ARG: Get capture timer resolution failed because of invalid argument
ESP_FAIL: Get capture timer resolution failed because of other error
-
esp_err_t mcpwm_capture_timer_set_phase_on_sync(mcpwm_cap_timer_handle_t cap_timer, const mcpwm_capture_timer_sync_phase_config_t *config)
Set sync phase for MCPWM capture timer.
- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer()config -- [in] MCPWM capture timer sync phase configuration
- Returns:
ESP_OK: Set sync phase for MCPWM capture timer successfully
ESP_ERR_INVALID_ARG: Set sync phase for MCPWM capture timer failed because of invalid argument
ESP_FAIL: Set sync phase for MCPWM capture timer failed because of other error
-
esp_err_t mcpwm_new_capture_channel(mcpwm_cap_timer_handle_t cap_timer, const mcpwm_capture_channel_config_t *config, mcpwm_cap_channel_handle_t *ret_cap_channel)
Create MCPWM capture channel.
Note
The created capture channel won't be enabled until calling
mcpwm_capture_channel_enable- Parameters:
cap_timer -- [in] MCPWM capture timer, allocated by
mcpwm_new_capture_timer(), will be connected to the new capture channelconfig -- [in] MCPWM capture channel configuration
ret_cap_channel -- [out] Returned MCPWM capture channel
- Returns:
ESP_OK: Create MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Create MCPWM capture channel failed because of invalid argument
ESP_ERR_NO_MEM: Create MCPWM capture channel failed because out of memory
ESP_ERR_NOT_FOUND: Create MCPWM capture channel failed because can't find free resource
ESP_FAIL: Create MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_del_capture_channel(mcpwm_cap_channel_handle_t cap_channel)
Delete MCPWM capture channel.
- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- Returns:
ESP_OK: Delete MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Delete MCPWM capture channel failed because of invalid argument
ESP_FAIL: Delete MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_enable(mcpwm_cap_channel_handle_t cap_channel)
Enable MCPWM capture channel.
Note
This function will transit the channel state from init to enable.
Note
This function will enable the interrupt service, if it's lazy installed in
mcpwm_capture_channel_register_event_callbacks().- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- Returns:
ESP_OK: Enable MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Enable MCPWM capture channel failed because of invalid argument
ESP_ERR_INVALID_STATE: Enable MCPWM capture channel failed because the channel is already enabled
ESP_FAIL: Enable MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_disable(mcpwm_cap_channel_handle_t cap_channel)
Disable MCPWM capture channel.
- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- Returns:
ESP_OK: Disable MCPWM capture channel successfully
ESP_ERR_INVALID_ARG: Disable MCPWM capture channel failed because of invalid argument
ESP_ERR_INVALID_STATE: Disable MCPWM capture channel failed because the channel is not enabled yet
ESP_FAIL: Disable MCPWM capture channel failed because of other error
-
esp_err_t mcpwm_capture_channel_register_event_callbacks(mcpwm_cap_channel_handle_t cap_channel, const mcpwm_capture_event_callbacks_t *cbs, void *user_data)
Set event callbacks for MCPWM capture channel.
Note
The first call to this function needs to be before the call to
mcpwm_capture_channel_enableNote
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK: Set event callbacks successfully
ESP_ERR_INVALID_ARG: Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE: Set event callbacks failed because the channel is not in init state
ESP_FAIL: Set event callbacks failed because of other error
-
esp_err_t mcpwm_capture_channel_trigger_soft_catch(mcpwm_cap_channel_handle_t cap_channel)
Trigger a catch by software.
- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()- Returns:
ESP_OK: Trigger software catch successfully
ESP_ERR_INVALID_ARG: Trigger software catch failed because of invalid argument
ESP_ERR_INVALID_STATE: Trigger software catch failed because the channel is not enabled yet
ESP_FAIL: Trigger software catch failed because of other error
-
esp_err_t mcpwm_capture_get_latched_value(mcpwm_cap_channel_handle_t cap_channel, uint32_t *value)
Get the last captured value of the MCPWM capture channel.
Note
To convert the count value to a time, user can use
mcpwm_capture_timer_get_resolutionto get the resolution of the capture timer.- Parameters:
cap_channel -- [in] MCPWM capture channel handle, allocated by
mcpwm_new_capture_channel()value -- [out] Returned capture value
- Returns:
ESP_OK: Get capture value successfully
ESP_ERR_INVALID_ARG: Get capture value failed because of invalid argument
ESP_FAIL: Get capture value failed because of other error
Structures
-
struct mcpwm_capture_timer_config_t
MCPWM capture timer configuration structure.
Public Members
-
int group_id
Specify from which group to allocate the capture timer
-
mcpwm_capture_clock_source_t clk_src
MCPWM capture timer clock source
-
uint32_t resolution_hz
Resolution of capture timer
-
struct mcpwm_capture_timer_config_t::extra_mcpwm_capture_timer_flags flags
Extra configuration flags for timer
-
struct extra_mcpwm_capture_timer_flags
Extra configuration flags for capture timer.
Public Members
-
uint32_t allow_pd
Set to allow power down. When this flag set, the driver will backup/restore the MCPWM registers before/after entering/exist sleep mode. By this approach, the system can power off MCPWM's power domain. This can save power, but at the expense of more RAM being consumed.
-
uint32_t allow_pd
-
int group_id
-
struct mcpwm_capture_timer_sync_phase_config_t
MCPWM Capture timer sync phase configuration.
Public Members
-
mcpwm_sync_handle_t sync_src
The sync event source
-
uint32_t count_value
The count value that should lock to upon sync event
-
mcpwm_timer_direction_t direction
The count direction that should lock to upon sync event
-
mcpwm_sync_handle_t sync_src
-
struct mcpwm_capture_channel_config_t
MCPWM capture channel configuration structure.
Public Members
-
int gpio_num
GPIO used capturing input signal
-
int intr_priority
MCPWM capture interrupt priority, if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
uint32_t prescale
Prescale of input signal, effective frequency = cap_input_clk/prescale
-
struct mcpwm_capture_channel_config_t::extra_capture_channel_flags flags
Extra configuration flags for capture channel
-
struct extra_capture_channel_flags
Extra configuration flags for capture channel.
-
int gpio_num
-
struct mcpwm_capture_event_callbacks_t
Group of supported MCPWM capture event callbacks.
Note
The callbacks are all running under ISR environment
Public Members
-
mcpwm_capture_event_cb_t on_cap
Callback function that would be invoked when capture event occurred
-
mcpwm_capture_event_cb_t on_cap
ETM API
Header File
This header file can be included with:
#include "driver/mcpwm_etm.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Functions
-
esp_err_t mcpwm_comparator_new_etm_event(mcpwm_cmpr_handle_t cmpr, const mcpwm_cmpr_etm_event_config_t *config, esp_etm_event_handle_t *out_event)
Get the ETM event for MCPWM comparator.
Note
The created ETM event object can be deleted later by calling
esp_etm_del_event- Parameters:
cmpr -- [in] MCPWM comparator, allocated by
mcpwm_new_comparator()ormcpwm_new_event_comparator()config -- [in] MCPWM ETM comparator event configuration
out_event -- [out] Returned ETM event handle
- Returns:
ESP_OK: Get ETM event successfully
ESP_ERR_INVALID_ARG: Get ETM event failed because of invalid argument
ESP_FAIL: Get ETM event failed because of other error
-
esp_err_t mcpwm_timer_new_etm_event(mcpwm_timer_handle_t timer, const mcpwm_timer_etm_event_config_t *config, esp_etm_event_handle_t *out_event)
Get the ETM event for MCPWM timer.
Note
The created ETM event object can be deleted later by calling
esp_etm_del_event- Parameters:
timer -- [in] MCPWM timer, allocated by
mcpwm_new_timer()config -- [in] MCPWM ETM timer event configuration
out_event -- [out] Returned ETM event handle
- Returns:
ESP_OK: Get ETM event successfully
ESP_ERR_INVALID_ARG: Get ETM event failed because of invalid argument
ESP_FAIL: Get ETM event failed because of other error
Structures
-
struct mcpwm_cmpr_etm_event_config_t
MCPWM event comparator ETM event configuration.
Public Members
-
mcpwm_comparator_etm_event_type_t event_type
MCPWM comparator ETM event type
-
mcpwm_comparator_etm_event_type_t event_type
-
struct mcpwm_timer_etm_event_config_t
MCPWM timer ETM event configuration.
Public Members
-
mcpwm_timer_etm_event_type_t event_type
MCPWM timer ETM event type
-
mcpwm_timer_etm_event_type_t event_type
Driver Types
Header File
This header file can be included with:
#include "driver/mcpwm_types.h"
This header file is a part of the API provided by the
esp_driver_mcpwmcomponent. To declare that your component depends onesp_driver_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_driver_mcpwm
or
PRIV_REQUIRES esp_driver_mcpwm
Structures
-
struct mcpwm_timer_event_data_t
MCPWM timer event data.
Public Members
-
uint32_t count_value
MCPWM timer count value
-
mcpwm_timer_direction_t direction
MCPWM timer count direction
-
uint32_t count_value
-
struct mcpwm_brake_event_data_t
MCPWM brake event data.
-
struct mcpwm_fault_event_data_t
MCPWM fault event data.
-
struct mcpwm_compare_event_data_t
MCPWM compare event data.
Public Members
-
uint32_t compare_ticks
Compare value
-
mcpwm_timer_direction_t direction
Count direction
-
uint32_t compare_ticks
-
struct mcpwm_capture_event_data_t
MCPWM capture event data.
Type Definitions
-
typedef struct mcpwm_timer_t *mcpwm_timer_handle_t
Type of MCPWM timer handle.
-
typedef struct mcpwm_oper_t *mcpwm_oper_handle_t
Type of MCPWM operator handle.
-
typedef struct mcpwm_cmpr_t *mcpwm_cmpr_handle_t
Type of MCPWM comparator handle.
-
typedef struct mcpwm_gen_t *mcpwm_gen_handle_t
Type of MCPWM generator handle.
-
typedef struct mcpwm_fault_t *mcpwm_fault_handle_t
Type of MCPWM fault handle.
-
typedef struct mcpwm_sync_t *mcpwm_sync_handle_t
Type of MCPWM sync handle.
-
typedef struct mcpwm_cap_timer_t *mcpwm_cap_timer_handle_t
Type of MCPWM capture timer handle.
-
typedef struct mcpwm_cap_channel_t *mcpwm_cap_channel_handle_t
Type of MCPWM capture channel handle.
-
typedef bool (*mcpwm_timer_event_cb_t)(mcpwm_timer_handle_t timer, const mcpwm_timer_event_data_t *edata, void *user_ctx)
MCPWM timer event callback function.
- Param timer:
[in] MCPWM timer handle
- Param edata:
[in] MCPWM timer event data, fed by driver
- Param user_ctx:
[in] User data, set in
mcpwm_timer_register_event_callbacks()- Return:
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_brake_event_cb_t)(mcpwm_oper_handle_t oper, const mcpwm_brake_event_data_t *edata, void *user_ctx)
MCPWM operator brake event callback function.
- Param oper:
[in] MCPWM operator handle
- Param edata:
[in] MCPWM brake event data, fed by driver
- Param user_ctx:
[in] User data, set in
mcpwm_operator_register_event_callbacks()- Return:
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_fault_event_cb_t)(mcpwm_fault_handle_t fault, const mcpwm_fault_event_data_t *edata, void *user_ctx)
MCPWM fault event callback function.
- Param fault:
MCPWM fault handle
- Param edata:
MCPWM fault event data, fed by driver
- Param user_ctx:
User data, set in
mcpwm_fault_register_event_callbacks()- Return:
whether a task switch is needed after the callback returns
-
typedef bool (*mcpwm_compare_event_cb_t)(mcpwm_cmpr_handle_t comparator, const mcpwm_compare_event_data_t *edata, void *user_ctx)
MCPWM comparator event callback function.
- Param comparator:
MCPWM comparator handle
- Param edata:
MCPWM comparator event data, fed by driver
- Param user_ctx:
User data, set in
mcpwm_comparator_register_event_callbacks()- Return:
Whether a high priority task has been waken up by this function
-
typedef bool (*mcpwm_capture_event_cb_t)(mcpwm_cap_channel_handle_t cap_channel, const mcpwm_capture_event_data_t *edata, void *user_ctx)
MCPWM capture event callback function.
- Param cap_channel:
MCPWM capture channel handle
- Param edata:
MCPWM capture event data, fed by driver
- Param user_ctx:
User data, set in
mcpwm_capture_channel_register_event_callbacks()- Return:
Whether a high priority task has been waken up by this function
HAL Types
Header File
This header file can be included with:
#include "hal/mcpwm_types.h"
This header file is a part of the API provided by the
esp_hal_mcpwmcomponent. To declare that your component depends onesp_hal_mcpwm, add the following to your CMakeLists.txt:REQUIRES esp_hal_mcpwm
or
PRIV_REQUIRES esp_hal_mcpwm
Type Definitions
-
typedef soc_periph_mcpwm_timer_clk_src_t mcpwm_timer_clock_source_t
MCPWM timer clock source.
-
typedef soc_periph_mcpwm_capture_clk_src_t mcpwm_capture_clock_source_t
MCPWM capture clock source.
-
typedef soc_periph_mcpwm_carrier_clk_src_t mcpwm_carrier_clock_source_t
MCPWM carrier clock source.
Enumerations
-
enum mcpwm_timer_direction_t
MCPWM timer count direction.
Values:
-
enumerator MCPWM_TIMER_DIRECTION_UP
Counting direction: Increase
-
enumerator MCPWM_TIMER_DIRECTION_DOWN
Counting direction: Decrease
-
enumerator MCPWM_TIMER_DIRECTION_UP
-
enum mcpwm_timer_event_t
MCPWM timer events.
Values:
-
enumerator MCPWM_TIMER_EVENT_EMPTY
MCPWM timer counts to zero (i.e. counter is empty)
-
enumerator MCPWM_TIMER_EVENT_FULL
MCPWM timer counts to peak (i.e. counter is full)
-
enumerator MCPWM_TIMER_EVENT_INVALID
MCPWM timer invalid event
-
enumerator MCPWM_TIMER_EVENT_EMPTY
-
enum mcpwm_timer_count_mode_t
MCPWM timer count modes.
Values:
-
enumerator MCPWM_TIMER_COUNT_MODE_PAUSE
MCPWM timer paused
-
enumerator MCPWM_TIMER_COUNT_MODE_UP
MCPWM timer counting up
-
enumerator MCPWM_TIMER_COUNT_MODE_DOWN
MCPWM timer counting down
-
enumerator MCPWM_TIMER_COUNT_MODE_UP_DOWN
MCPWM timer counting up and down
-
enumerator MCPWM_TIMER_COUNT_MODE_PAUSE
-
enum mcpwm_timer_start_stop_cmd_t
MCPWM timer commands, specify the way to start or stop the timer.
Values:
-
enumerator MCPWM_TIMER_STOP_EMPTY
MCPWM timer stops when next count reaches zero
-
enumerator MCPWM_TIMER_STOP_FULL
MCPWM timer stops when next count reaches peak
-
enumerator MCPWM_TIMER_START_NO_STOP
MCPWM timer starts counting, and don't stop until received stop command
-
enumerator MCPWM_TIMER_START_STOP_EMPTY
MCPWM timer starts counting and stops when next count reaches zero
-
enumerator MCPWM_TIMER_START_STOP_FULL
MCPWM timer starts counting and stops when next count reaches peak
-
enumerator MCPWM_TIMER_STOP_EMPTY
-
enum mcpwm_generator_action_t
MCPWM generator actions.
Values:
-
enumerator MCPWM_GEN_ACTION_KEEP
Generator action: Keep the same level
-
enumerator MCPWM_GEN_ACTION_LOW
Generator action: Force to low level
-
enumerator MCPWM_GEN_ACTION_HIGH
Generator action: Force to high level
-
enumerator MCPWM_GEN_ACTION_TOGGLE
Generator action: Toggle level
-
enumerator MCPWM_GEN_ACTION_KEEP
-
enum mcpwm_operator_brake_mode_t
MCPWM operator brake mode.
Values:
-
enumerator MCPWM_OPER_BRAKE_MODE_CBC
Brake mode: CBC (cycle by cycle)
-
enumerator MCPWM_OPER_BRAKE_MODE_OST
Brake mode: OST (one shot)
-
enumerator MCPWM_OPER_BRAKE_MODE_INVALID
MCPWM operator invalid brake mode
-
enumerator MCPWM_OPER_BRAKE_MODE_CBC
-
enum mcpwm_capture_edge_t
MCPWM capture edge.
Values:
-
enumerator MCPWM_CAP_EDGE_POS
Capture on the positive edge
-
enumerator MCPWM_CAP_EDGE_NEG
Capture on the negative edge
-
enumerator MCPWM_CAP_EDGE_POS