Asynchronous CRC Calculation
This document introduces the features of the Asynchronous CRC (Async CRC) driver in ESP-IDF. The table of contents is as follows:
Overview
The Async CRC driver provides hardware-accelerated CRC calculation using the General DMA peripheral. It supports both AHB-GDMA and AXI-GDMA backends, offering flexible CRC computation with configurable polynomial, initial value, bit reversal options, and final XOR processing.
Key capabilities include:
Hardware-accelerated CRC calculation using General DMA
Support for 8-bit, 16-bit, and 32-bit CRC algorithms
Asynchronous API with callback notifications
Blocking API with timeout support
Request queuing with configurable backlog size
Support for both AHB and AXI DMA backends
Application scenarios include:
Data integrity verification for communication protocols
File and firmware checksum calculation
Network packet validation
Storage data verification
Quick Start
This section provides a concise overview of how to use the Async CRC driver. Through practical examples, it demonstrates how to initialize the driver, configure CRC parameters, and perform both asynchronous and blocking CRC calculations.
The typical usage flow for async CRC is as follows:
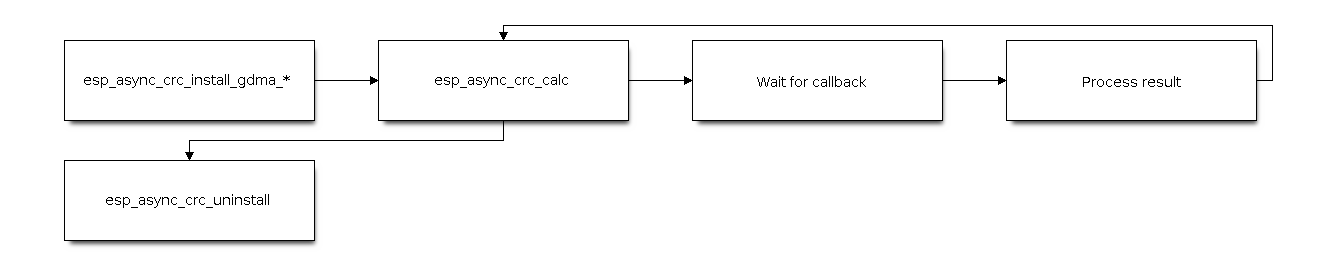
Async CRC driver's general usage flow (click to enlarge)
Creating and Installing the Driver
First, you need to install the Async CRC driver. The driver supports both AHB-GDMA and AXI-GDMA backends, depending on your chip's capabilities:
async_crc_handle_t crc_hdl = NULL;
async_crc_config_t config = {
.backlog = 8, // Maximum pending requests in queue
.dma_burst_size = 16, // DMA burst size in bytes
};
// Install with AHB-GDMA backend (if available)
ESP_ERROR_CHECK(esp_async_crc_install_gdma_ahb(&config, &crc_hdl));
// Or install with AXI-GDMA backend (if available)
// ESP_ERROR_CHECK(esp_async_crc_install_gdma_axi(&config, &crc_hdl));
Note
Choosing Between AHB-GDMA and AXI-GDMA Backends
The backend choice depends on your chip's capabilities and performance requirements:
AHB-GDMA: Available on most ESP chips. Connects to the AHB bus, suitable for general-purpose DMA operations. Best for:
Standard performance requirements
Compatibility across most ESP chip variants
AXI-GDMA: Available on higher-end ESP chips with AXI bus support. Provides higher bandwidth and better performance for memory-intensive operations. Best for:
High-throughput CRC calculations
Processing large amounts of data
Applications requiring maximum performance
Accessing external memory (PSRAM) with better efficiency
When creating a driver instance, you need to configure:
backlog: Maximum number of pending CRC requests that can be queued. Higher values use more memory but provide better throughput for bursty workloads.
intr_priority: DMA interrupt priority. Set to
0to use the default low/medium priority, or set a non-zero value to request a specific interrupt priority.dma_burst_size: DMA transfer burst size in bytes.
The driver handle crc_hdl is an opaque pointer that you use for all subsequent operations.
Performing Asynchronous CRC Calculation
The async API allows you to queue CRC calculations without blocking:
static bool crc_complete_callback(async_crc_handle_t crc_hdl, async_crc_event_data_t *edata, void *cb_args)
{
uint32_t result = edata->crc_result;
// Further process the CRC result
// e.g., send to a task via queue, log it, etc.
return false;
}
// Configure CRC parameters for CRC-32
async_crc_params_t params = {
.width = 32,
.polynomial = 0x04C11DB7,
.init_value = 0xFFFFFFFF,
.final_xor_value = 0xFFFFFFFF,
.reverse_input = true,
.reverse_output = true,
};
// Start async CRC calculation
const char *data = "Hello, World!";
size_t data_len = strlen(data);
ESP_ERROR_CHECK(esp_async_crc_calc(crc_hdl, data, data_len, ¶ms, crc_complete_callback, NULL));
The callback function is invoked in interrupt context when the CRC calculation completes. The callback receives:
crc_hdl: The driver handle
edata: Event data containing the CRC result
cb_args: User-defined argument passed during
esp_async_crc_calc
Performing Blocking CRC Calculation
For simpler use cases or when async operations are not required, use the blocking API:
uint32_t crc_result = 0;
async_crc_params_t params = {
.width = 32,
.polynomial = 0x04C11DB7,
.init_value = 0xFFFFFFFF,
.final_xor_value = 0xFFFFFFFF,
.reverse_input = true,
.reverse_output = true,
};
const char *data = "Hello, World!";
size_t data_len = strlen(data);
// Blocking CRC, wait indefinitely
ESP_ERROR_CHECK(esp_crc_calc_blocking(crc_hdl, data, data_len, ¶ms, -1, &crc_result));
printf("CRC result: 0x%08X\n", crc_result);
The blocking API only supports timeout_ms = -1, which means waiting indefinitely until the CRC calculation completes.
Uninstalling the Driver
When the driver is no longer needed:
ESP_ERROR_CHECK(esp_async_crc_uninstall(crc_hdl));
The uninstall function returns ESP_ERR_INVALID_STATE if there are pending operations or if the CRC engine is busy. Ensure all operations complete before uninstalling.
CRC Parameter Configuration
The Async CRC driver supports flexible CRC algorithm configuration through the async_crc_params_t structure.
CRC Width
The async_crc_params_t::width field specifies the CRC bit width:
8: 8-bit CRC (e.g., CRC-8, CRC-8/MAXIM)
16: 16-bit CRC (e.g., CRC-16/CCITT, CRC-16/IBM)
32: 32-bit CRC (e.g., CRC-32, CRC-32/BZIP2)
Polynomial
The async_crc_params_t::polynomial field specifies the CRC polynomial in hexadecimal format. Common polynomial values include:
CRC-32:
0x04C11DB7CRC-16/CCITT:
0x1021CRC-16/IBM:
0x8005CRC-8/MAXIM:
0x31
Initial Value
The async_crc_params_t::init_value field sets the initial CRC value before processing. Common initial values:
0xFFFFFFFFfor CRC-320x0000for many CRC-16 variants0x00for many CRC-8 variants
Final XOR Value
The async_crc_params_t::final_xor_value field specifies a value to XOR with the final CRC result. This is commonly 0xFFFFFFFF for CRC-32 but can be 0x0000 for some variants.
Bit Reversal Options
async_crc_params_t::reverse_inputIf true, reverses the bit order of each input byte before processingasync_crc_params_t::reverse_outputIf true, reverses the bit order of the final CRC result before applying the final XOR
These options affect the reflection settings for different CRC algorithms.
Common CRC Configurations
The following table lists common CRC configurations:
CRC Algorithm |
Width |
Polynomial |
Initial Value |
Final XOR |
Reverse Input |
Reverse Output |
|---|---|---|---|---|---|---|
CRC-32 |
32 |
0x04C11DB7 |
0xFFFFFFFF |
0xFFFFFFFF |
true |
true |
CRC-16/CCITT |
16 |
0x1021 |
0x0000 |
0x0000 |
false |
false |
CRC-16/IBM |
16 |
0x8005 |
0x0000 |
0x0000 |
true |
true |
CRC-8/MAXIM |
8 |
0x31 |
0x00 |
0x00 |
true |
true |
Thread Safety
The Async CRC driver is designed to be thread-safe and can be used from multiple tasks. The driver features a race-free Finite State Machine (FSM) architecture that ensures thread safety and proper handling of concurrent CRC requests.
Thread Safety Guarantees
All public APIs can be called from different tasks simultaneously
The driver uses atomic operations and critical sections for internal state protection
Request queuing ensures that concurrent calls are properly serialized
ISR Context Restrictions
Neither the async API nor the blocking API can be called from interrupt context. Specifically:
esp_async_crc_calc(): Involves memory allocation/free, DMA preparations, and logging functions that are not ISR-safeesp_crc_calc_blocking(): Uses synchronization primitives that may block
Callback Restrictions
The callback function (async_crc_isr_cb_t) is executed in interrupt context. Therefore:
Do not perform blocking operations (e.g.,
vTaskDelay,xQueueSendwith timeout)Keep execution time minimal to avoid impacting system interrupt latency
Do not allocate memory using
mallocor similar functionsUse only ISR-safe FreeRTOS APIs (e.g.,
xQueueSendFromISR,xSemaphoreGiveFromISR)Return
trueif the callback wakes a high-priority task
Example of callback using queue:
static bool crc_callback(async_crc_handle_t crc_hdl, async_crc_event_data_t *edata, void *cb_args)
{
QueueHandle_t queue = (QueueHandle_t)cb_args;
BaseType_t high_task_awoken = pdFALSE;
// Send result to a task via ISR-safe queue
xQueueSendFromISR(queue, &edata->crc_result, &high_task_awoken);
return high_task_awoken == pdTRUE;
}
Buffer Requirements
The Async CRC driver has specific requirements for data buffers.
Memory Type
Data buffers can be in internal memory (DRAM/IRAM) or external memory (PSRAM, Flash). The driver automatically handles both:
// Internal RAM
static char internal_data[] = "Data in internal RAM";
esp_async_crc_calc(crc_hdl, internal_data, strlen(internal_data), ¶ms, callback, NULL);
// External Flash
static const char *flash_data = "Data in external Flash";
esp_async_crc_calc(crc_hdl, flash_data, strlen(flash_data), ¶ms, callback, NULL);
Performance Considerations
Backlog Configuration
The backlog configuration affects performance:
Small backlog (4-8): Lower memory usage, may cause backpressure under high load
Large backlog (16+): Better throughput for bursty workloads, higher memory usage
Choose based on your application's memory constraints and workload pattern.
DMA Burst Size
The dma_burst_size affects DMA transfer efficiency:
Larger burst sizes can improve throughput
Typical values: 16, 32, 64 bytes
The optimal value depends on your chip's DMA controller capabilities.
Application Examples
peripherals/dma/async_crc demonstrates how to use the Async CRC driver through an interactive console CLI.
API Reference
Async CRC Driver Functions
Header File
This header file can be included with:
#include "esp_async_crc.h"
This header file is a part of the API provided by the
esp_driver_dmacomponent. To declare that your component depends onesp_driver_dma, add the following to your CMakeLists.txt:REQUIRES esp_driver_dma
or
PRIV_REQUIRES esp_driver_dma
Functions
-
esp_err_t esp_async_crc_uninstall(async_crc_handle_t crc_hdl)
Uninstall async CRC driver.
- Parameters:
crc_hdl -- [in] Handle of async CRC driver that returned from install functions
- Returns:
ESP_OK: Uninstall async CRC driver successfully
ESP_ERR_INVALID_ARG: Uninstall async CRC driver failed because of invalid argument
ESP_FAIL: Uninstall async CRC driver failed because of other error
-
esp_err_t esp_async_crc_calc(async_crc_handle_t crc_hdl, const void *data, size_t size, const async_crc_params_t *params, async_crc_isr_cb_t cb_isr, void *cb_args)
Send an asynchronous CRC calculation request.
Note
The callback function is invoked in interrupt context, never do blocking jobs in the callback.
- Parameters:
crc_hdl -- [in] Handle of async CRC driver that returned from install functions
data -- [in] Pointer to data buffer for CRC calculation
size -- [in] Size of data in bytes
params -- [in] CRC calculation parameters
cb_isr -- [in] Callback function, which got invoked in interrupt context. Set to NULL can bypass the callback.
cb_args -- [in] User defined argument to be passed to the callback function
- Returns:
ESP_OK: Send CRC calculation request successfully
ESP_ERR_INVALID_ARG: Send CRC calculation request failed because of invalid argument
ESP_ERR_INVALID_STATE: CRC driver is not in proper state to accept new requests
ESP_FAIL: Send CRC calculation request failed because of other error
-
esp_err_t esp_crc_calc_blocking(async_crc_handle_t crc_hdl, const void *data, size_t size, const async_crc_params_t *params, int32_t timeout_ms, uint32_t *result)
Blocking CRC calculation function with timeout.
Note
This function is blocking and should not be called from interrupt context.
Note
Only
timeout_ms=-1is supported, which means waiting indefinitely.- Parameters:
crc_hdl -- [in] Handle of async CRC driver that returned from install functions
data -- [in] Pointer to data buffer for CRC calculation
size -- [in] Size of data in bytes
params -- [in] CRC calculation parameters
timeout_ms -- [in] Timeout in milliseconds. Only -1 is supported.
result -- [out] Pointer to store CRC calculation result
- Returns:
ESP_OK: Calculate CRC successfully
ESP_ERR_INVALID_ARG: Calculate CRC failed because of invalid argument
ESP_ERR_INVALID_STATE: Function called from ISR context or driver in invalid state
ESP_FAIL: Calculate CRC failed because of other error
Structures
-
struct async_crc_event_data_t
Async CRC event data.
Public Members
-
uint32_t crc_result
CRC calculation result
-
uint32_t crc_result
-
struct async_crc_config_t
Type of async CRC configuration.
Public Members
-
uint32_t backlog
Maximum number of pending CRC requests that can be queued per driver instance. Higher values use more memory but provide better throughput for bursty workloads.
-
size_t dma_burst_size
DMA transfer burst size, in bytes
-
uint32_t intr_priority
DMA interrupt priority. 0 means default low/medium priority.
-
uint32_t backlog
-
struct async_crc_params_t
CRC calculation parameters.
Type Definitions
-
typedef struct async_crc_context_t *async_crc_handle_t
Async CRC driver handle.
-
typedef bool (*async_crc_isr_cb_t)(async_crc_handle_t crc_hdl, async_crc_event_data_t *edata, void *cb_args)
Type of async CRC interrupt callback function.
Note
User can call OS primitives (semaphore, mutex, etc) in the callback function. Keep in mind, if any OS primitive wakes high priority task up, the callback should return true.
Note
This callback function is invoked in interrupt context (ISR). The following restrictions apply:
Do not perform blocking operations (e.g., vTaskDelay, xQueueSend with non-zero timeout)
Keep execution time minimal to avoid impacting system interrupt latency
Avoid calling non-ISR-safe FreeRTOS functions
Do not allocate memory or perform heavy computations
Use only ISR-safe APIs (xQueueSendFromISR, xSemaphoreGiveFromISR, etc.)
- Param crc_hdl:
Handle of async CRC
- Param edata:
Event data object, which contains related data for this event
- Param cb_args:
User defined arguments, passed from esp_async_crc_calc function
- Return:
Whether a high priority task is woken up by the callback function