Inter-Integrated Circuit (I2C)
Introduction
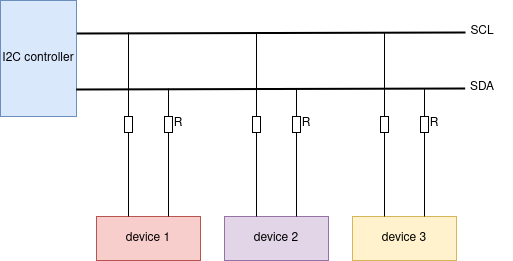
I2C is a serial, synchronous, multi-device, half-duplex communication protocol that allows co-existence of multiple masters and slaves on the same bus. I2C uses two bidirectional open-drain lines: serial data line (SDA) and serial clock line (SCL), pulled up by resistors.
ESP32-C6 has 1 I2C controller (also called port), responsible for handling communication on the I2C bus. A single I2C controller can be a master or a slave.
Typically, an I2C slave device has a 7-bit address or 10-bit address. ESP32-C6 supports both I2C Standard-mode (Sm) and Fast-mode (Fm) which can go up to 100KHz and 400KHz respectively.
Warning
The clock frequency of SCL in master mode should not be larger than 400 KHz
Note
The frequency of SCL is influenced by both the pull-up resistor and the wire capacitance. Therefore, users are strongly recommended to choose appropriate pull-up resistors to make the frequency accurate. The recommended value for pull-up resistors usually ranges from 1K Ohms to 10K Ohms.
Keep in mind that the higher the frequency, the smaller the pull-up resistor should be (but not less than 1 KOhms). Indeed, large resistors will decline the current, which will increase the clock switching time and reduce the frequency. We usually recommend a range of 2 KOhms to 5 KOhms, but users may also need to make some adjustments depending on their current draw requirements.
I2C Clock Configuration
i2c_clock_source_t::I2C_CLK_SRC_DEFAULT: Default I2C source clock.i2c_clock_source_t::I2C_CLK_SRC_XTAL: External crystal for I2C clock source.i2c_clock_source_t::I2C_CLK_RC_FAST: Internal 20MHz rc oscillator for I2C clock source.
I2C File Structure
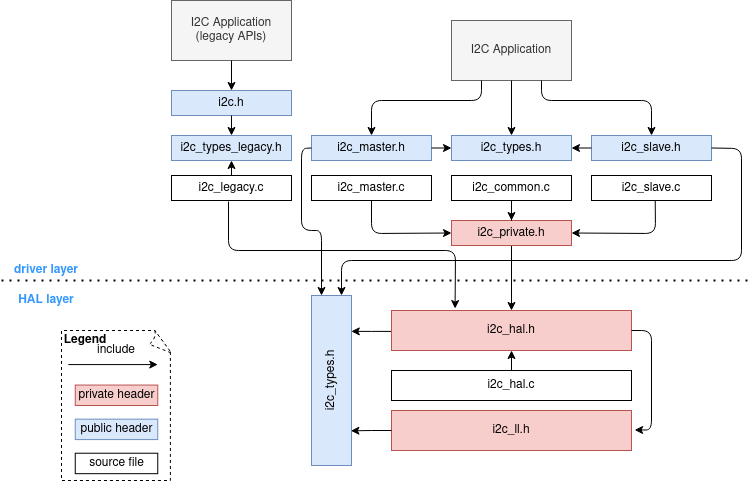
I2C file structure
Public headers that need to be included in the I2C application
i2c.h: The header file of legacy I2C APIs (for apps using legacy driver).i2c_master.h: The header file that provides standard communication mode specific APIs (for apps using new driver with master mode).i2c_slave.h: The header file that provides standard communication mode specific APIs (for apps using new driver with slave mode).
Note
The legacy driver can't coexist with the new driver. Include i2c.h to use the legacy driver or the other two headers to use the new driver. Please keep in mind that the legacy driver is now deprecated and will be removed in future.
Public headers that have been included in the headers above
i2c_types_legacy.h: The legacy public types that only used in the legacy driver.i2c_types.h: The header file that provides public types.
Functional Overview
The I2C driver offers following services:
Resource Allocation - covers how to allocate I2C bus with properly set of configurations. It also covers how to recycle the resources when they finished working.
I2C Master Controller - covers behavior of I2C master controller. Introduce data transmit, data receive, and data transmit and receive.
I2C Slave Controller - covers behavior of I2C slave controller. Involve data transmit and data receive.
Power Management - describes how different source clock will affect power consumption.
IRAM Safe - describes tips on how to make the I2C interrupt work better along with a disabled cache.
Thread Safety - lists which APIs are guaranteed to be thread safe by the driver.
Kconfig Options - lists the supported Kconfig options that can bring different effects to the driver.
Resource Allocation
Both I2C master bus and I2C slave bus, when supported, are represented by i2c_bus_handle_t in the driver. The available ports are managed in a resource pool that allocates a free port on request.
Install I2C master bus and device
The I2C master is designed based on bus-device model. So i2c_master_bus_config_t and i2c_device_config_t are required separately to allocate the I2C master bus instance and I2C device instance.
I2C master bus-device module
I2C master bus requires the configuration that specified by i2c_master_bus_config_t:
i2c_master_bus_config_t::i2c_portsets the I2C port used by the controller.i2c_master_bus_config_t::sda_io_numsets the GPIO number for the serial data bus (SDA).i2c_master_bus_config_t::scl_io_numsets the GPIO number for the serial clock bus (SCL).i2c_master_bus_config_t::clk_sourceselects the source clock for I2C bus. The available clocks are listed ini2c_clock_source_t. For the effect on power consumption of different clock source, please refer to Power Management section.i2c_master_bus_config_t::glitch_ignore_cntsets the glitch period of master bus, if the glitch period on the line is less than this value, it can be filtered out, typically value is 7.i2c_master_bus_config_t::intr_prioritySet the priority of the interrupt. If set to0, then the driver will use a interrupt with low or medium priority (priority level may be one of 1,2 or 3), otherwise use the priority indicated byi2c_master_bus_config_t::intr_priorityPlease use the number form (1,2,3) , not the bitmask form ((1<<1),(1<<2),(1<<3)).i2c_master_bus_config_t::trans_queue_depthDepth of internal transfer queue. Only valid in asynchronous transaction.i2c_master_bus_config_t::enable_internal_pullupEnable internal pullups. Note: This is not strong enough to pullup buses under high-speed frequency. A suitable external pullup is recommended.
If the configurations in i2c_master_bus_config_t is specified, users can call i2c_new_master_bus() to allocate and initialize an I2C master bus. This function will return an I2C bus handle if it runs correctly. Specifically, when there are no more I2C port available, this function will return ESP_ERR_NOT_FOUND error.
I2C master device requires the configuration that specified by i2c_device_config_t:
i2c_device_config_t::dev_addr_lengthconfigure the address bit length of the slave device. User can choose from enumeratorI2C_ADDR_BIT_LEN_7orI2C_ADDR_BIT_LEN_10(if supported).i2c_device_config_t::device_addressI2C device raw address. Please parse the device address to this member directly. For example, the device address is 0x28, then parse 0x28 toi2c_device_config_t::device_address, don't carry a write/read bit.i2c_device_config_t::scl_speed_hzset the scl line frequency of this device.i2c_device_config_t::scl_wait_us. SCL await time (in us). Usually this value should not be very small because slave stretch will happen in pretty long time. (It's possible even stretch for 12ms). Set 0 means use default reg value.
Once the i2c_device_config_t structure is populated with mandatory parameters, users can call i2c_master_bus_add_device() to allocate an I2C device instance and mounted to the master bus then. This function will return an I2C device handle if it runs correctly. Specifically, when the I2C bus is not initialized properly, calling this function will result in a ESP_ERR_INVALID_ARG error.
#include "driver/i2c_master.h"
i2c_master_bus_config_t i2c_mst_config = {
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_io_num = I2C_MASTER_SDA_IO,
.glitch_ignore_cnt = 7,
.flags.enable_internal_pullup = true,
};
i2c_master_bus_handle_t bus_handle;
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config, &bus_handle));
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7,
.device_address = 0x58,
.scl_speed_hz = 100000,
};
i2c_master_dev_handle_t dev_handle;
ESP_ERROR_CHECK(i2c_master_bus_add_device(bus_handle, &dev_cfg, &dev_handle));
Get I2C master handle via port
Given that i2c master handle has been initialized in some module(e.g. an audio module), an another module(e.g. a video module) is not convenient to reused the handle. We have a helper function, i2c_master_get_bus_handle() for getting the initialized handle via port. However, please make sure the handle has already been initialized ahead of time. Otherwise an error would be reported.
// Source File 1
#include "driver/i2c_master.h"
i2c_master_bus_handle_t bus_handle;
i2c_master_bus_config_t i2c_mst_config = {
... // same as others
};
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config, &bus_handle));
// Source File 2
#include "driver/i2c_master.h"
i2c_master_bus_handle_t handle;
ESP_ERROR_CHECK(i2c_master_get_bus_handle(0, &handle));
Uninstall I2C master bus and device
If a previously installed I2C bus or device is no longer needed, it's recommended to recycle the resource by calling i2c_master_bus_rm_device() or i2c_del_master_bus(), so that to release the underlying hardware.
Install I2C slave device
I2C slave requires the configuration that specified by i2c_slave_config_t:
i2c_slave_config_t::i2c_portsets the I2C port used by the controller.i2c_slave_config_t::sda_io_numsets the GPIO number for serial data bus (SDA).i2c_slave_config_t::scl_io_numsets the GPIO number for serial clock bus (SCL).i2c_slave_config_t::clk_sourceselects the source clock for I2C bus. The available clocks are listed ini2c_clock_source_t. For the effect on power consumption of different clock source, please refer to Power Management section.i2c_slave_config_t::send_buf_depthsets the sending buffer length.i2c_slave_config_t::slave_addrsets the slave addressi2c_master_bus_config_t::intr_prioritySet the priority of the interrupt. If set to0, then the driver will use a interrupt with low or medium priority (priority level may be one of 1,2 or 3), otherwise use the priority indicated byi2c_master_bus_config_t::intr_priorityPlease use the number form (1,2,3) , not the bitmask form ((1<<1),(1<<2),(1<<3)). Please pay attention that once the interrupt priority is set, it cannot be changed untili2c_del_master_bus()is called.i2c_slave_config_t::addr_bit_lensets true if you need the slave to have a 10-bit address.i2c_slave_config_t::stretch_enSet true if you want the slave controller stretch works, please refer to [TRM] to learn how I2C stretch works.i2c_slave_config_t::broadcast_enSet true to enable the slave broadcase. When the slave receives the general call address 0x00 from the master and the R/W bit followed is 0, it responds to the master regardless of its own address.i2c_slave_config_t::access_ram_enSet true to enable the non-fifo mode. Thus the I2C data fifo can be used as RAM, and double addressing will be synchronised opened.i2c_slave_config_t::slave_unmatch_enSet true to enable the slave unmatch interrupt. If master send command address cannot match the slave address, and unmatch interrupt will be triggered.
Once the i2c_slave_config_t structure is populated with mandatory parameters, users can call i2c_new_slave_device() to allocate and initialize an I2C master bus. This function will return an I2C bus handle if it runs correctly. Specifically, when there are no more I2C port available, this function will return ESP_ERR_NOT_FOUND error.
i2c_slave_config_t i2c_slv_config = {
.addr_bit_len = I2C_ADDR_BIT_LEN_7,
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.send_buf_depth = 256,
.scl_io_num = I2C_SLAVE_SCL_IO,
.sda_io_num = I2C_SLAVE_SDA_IO,
.slave_addr = 0x58,
};
i2c_slave_dev_handle_t slave_handle;
ESP_ERROR_CHECK(i2c_new_slave_device(&i2c_slv_config, &slave_handle));
Uninstall I2C slave device
If a previously installed I2C bus is no longer needed, it's recommended to recycle the resource by calling i2c_del_slave_device(), so that to release the underlying hardware.
I2C Master Controller
After installing the i2c master driver by i2c_new_master_bus(), ESP32-C6 is ready to communicate with other I2C devices. I2C APIs allow the standard transactions. Like the wave as follows:
I2C Master Write
After installing I2C master bus successfully, you can simply call i2c_master_transmit() to write data to the slave device. The principle of this function can be explained by following chart.
In order to organize the process, the driver uses a command link, that should be populated with a sequence of commands and then passed to I2C controller for execution.

I2C master write to slave
Simple example for writing data to slave:
#define DATA_LENGTH 100
i2c_master_bus_config_t i2c_mst_config = {
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = I2C_PORT_NUM_0,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_io_num = I2C_MASTER_SDA_IO,
.glitch_ignore_cnt = 7,
};
i2c_master_bus_handle_t bus_handle;
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config, &bus_handle));
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7,
.device_address = 0x58,
.scl_speed_hz = 100000,
};
i2c_master_dev_handle_t dev_handle;
ESP_ERROR_CHECK(i2c_master_bus_add_device(bus_handle, &dev_cfg, &dev_handle));
ESP_ERROR_CHECK(i2c_master_transmit(dev_handle, data_wr, DATA_LENGTH, -1));
I2C Master Read
After installing I2C master bus successfully, you can simply call i2c_master_receive() to read data from the slave device. The principle of this function can be explained by following chart.

I2C master read from slave
Simple example for reading data from slave:
#define DATA_LENGTH 100
i2c_master_bus_config_t i2c_mst_config = {
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = I2C_PORT_NUM_0,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_io_num = I2C_MASTER_SDA_IO,
.glitch_ignore_cnt = 7,
};
i2c_master_bus_handle_t bus_handle;
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config, &bus_handle));
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7,
.device_address = 0x58,
.scl_speed_hz = 100000,
};
i2c_master_dev_handle_t dev_handle;
ESP_ERROR_CHECK(i2c_master_bus_add_device(bus_handle, &dev_cfg, &dev_handle));
i2c_master_receive(dev_handle, data_rd, DATA_LENGTH, -1);
I2C Master Write and Read
Some I2C device needs write configurations before reading data from it, therefore, an interface called i2c_master_transmit_receive() can help. The principle of this function can be explained by following chart.

I2C master write to slave and read from slave
Simple example for writing and reading from slave:
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7,
.device_address = 0x58,
.scl_speed_hz = 100000,
};
i2c_master_dev_handle_t dev_handle;
ESP_ERROR_CHECK(i2c_master_bus_add_device(I2C_PORT_NUM_0, &dev_cfg, &dev_handle));
uint8_t buf[20] = {0x20};
uint8_t buffer[2];
ESP_ERROR_CHECK(i2c_master_transmit_receive(i2c_bus_handle, buf, sizeof(buf), buffer, 2, -1));
I2C Master Probe
I2C driver can use i2c_master_probe() to detect whether the specific device has been connected on I2C bus. If this function return ESP_OK, that means the device has been detected.
Important
Pull-ups must be connected to the SCL and SDA pins when this function is called. If you get ESP_ERR_TIMEOUT while xfer_timeout_ms was parsed correctly, you should check the pull-up resistors. If you do not have proper resistors nearby, setting flags.enable_internal_pullup as true is also acceptable.

I2C master probe
Simple example for probing an I2C device:
i2c_master_bus_config_t i2c_mst_config_1 = {
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_io_num = I2C_MASTER_SDA_IO,
.glitch_ignore_cnt = 7,
.flags.enable_internal_pullup = true,
};
i2c_master_bus_handle_t bus_handle;
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config_1, &bus_handle));
ESP_ERROR_CHECK(i2c_master_probe(bus_handle, 0x22, -1));
ESP_ERROR_CHECK(i2c_del_master_bus(bus_handle));
I2C Master Execute Customized Transactions
Not all I2C devices strictly adhere to the standard I2C protocol, as different manufacturers may implement custom variations. For example, some devices require the address to be shifted, while others do not. Similarly, certain devices mandate acknowledgment (ACK) checks for specific operations, whereas others might not. To accommodate these variations, i2c_master_execute_defined_operations() function allow developers to define and execute fully customized I2C transactions. This flexibility ensures seamless communication with non-standard devices by tailoring the transaction sequence, addressing, and acknowledgment behavior to the device's specific requirements.
Note
If you want to define your address in i2c_operation_job_t, please set i2c_device_config_t::device_address as I2C_DEVICE_ADDRESS_NOT_USED to skip internal address configuration in driver.
For address configuration of using defined transactions, given that a device address is 0x20, there are two situations, see following example:
i2c_device_config_t i2c_device = {
.device_address = I2C_DEVICE_ADDRESS_NOT_USED,
.scl_speed_hz = 100 * 1000,
.scl_wait_us = 20000,
};
i2c_master_dev_handle_t dev_handle;
i2c_master_bus_add_device(bus_handle, &i2c_device, &dev_handle);
// Situation one: The device does not allow device address shift
uint8_t address1 = 0x20;
i2c_operation_job_t i2c_ops1[] = {
{ .command = I2C_MASTER_CMD_START },
{ .command = I2C_MASTER_CMD_WRITE, .write = { .ack_check = false, .data = (uint8_t *) &address1, .total_bytes = 1 } },
{ .command = I2C_MASTER_CMD_STOP },
};
// Situation one: The device should left shift one byte with carrying a write or read bit (official protocol)
uint8_t address2 = (0x20 << 1 | 0); // (0x20 << 1 | 1)
i2c_operation_job_t i2c_ops2[] = {
{ .command = I2C_MASTER_CMD_START },
{ .command = I2C_MASTER_CMD_WRITE, .write = { .ack_check = false, .data = (uint8_t *) &address2, .total_bytes = 1 } },
{ .command = I2C_MASTER_CMD_STOP },
};
There are also some devices does not need an address, you can directly do transaction with data:
uint8_t data[8] = {0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88};
i2c_operation_job_t i2c_ops[] = {
{ .command = I2C_MASTER_CMD_START },
{ .command = I2C_MASTER_CMD_WRITE, .write = { .ack_check = false, .data = (uint8_t *)data, .total_bytes = 8 } },
{ .command = I2C_MASTER_CMD_STOP },
};
i2c_master_execute_defined_operations(dev_handle, i2c_ops, sizeof(i2c_ops) / sizeof(i2c_operation_job_t), -1);
As for read direction, the theory is same but please always be aware the last byte of read before stop should always be nack. Example is as follows:
uint8_t address = (0x20 << 1 | 1);
uint8_t rcv_data[10] = {};
i2c_operation_job_t i2c_ops[] = {
{ .command = I2C_MASTER_CMD_START },
{ .command = I2C_MASTER_CMD_WRITE, .write = { .ack_check = false, .data = (uint8_t *) &address, .total_bytes = 1 } },
{ .command = I2C_MASTER_CMD_READ, .read = { .ack_value = I2C_ACK_VAL, .data = (uint8_t *)rcv_data, .total_bytes = 9 } },
{ .command = I2C_MASTER_CMD_READ, .read = { .ack_value = I2C_NACK_VAL, .data = (uint8_t *)(rcv_data + 9), .total_bytes = 1 } }, // This must be nack.
{ .command = I2C_MASTER_CMD_STOP },
};
i2c_master_execute_defined_operations(dev_handle, i2c_ops, sizeof(i2c_ops) / sizeof(i2c_operation_job_t), -1);
I2C Slave Controller
After installing the i2c slave driver by i2c_new_slave_device(), ESP32-C6 is ready to communicate with other I2C master as a slave.
I2C Slave Write
The send buffer of the I2C slave is used as a FIFO to store the data to be sent. The data will queue up until the master requests them. You can call i2c_slave_transmit() to transfer data.
Simple example for writing data to FIFO:
uint8_t *data_wr = (uint8_t *) malloc(DATA_LENGTH);
i2c_slave_config_t i2c_slv_config = {
.addr_bit_len = I2C_ADDR_BIT_LEN_7, // 7-bit address
.clk_source = I2C_CLK_SRC_DEFAULT, // set the clock source
.i2c_port = 0, // set I2C port number
.send_buf_depth = 256, // set tx buffer length
.scl_io_num = 2, // SCL gpio number
.sda_io_num = 1, // SDA gpio number
.slave_addr = 0x58, // slave address
};
i2c_bus_handle_t i2c_bus_handle;
ESP_ERROR_CHECK(i2c_new_slave_device(&i2c_slv_config, &i2c_bus_handle));
for (int i = 0; i < DATA_LENGTH; i++) {
data_wr[i] = i;
}
ESP_ERROR_CHECK(i2c_slave_transmit(i2c_bus_handle, data_wr, DATA_LENGTH, 10000));
I2C Slave Read
Whenever the master writes data to the slave, the slave will automatically store data in the receive buffer. This allows the slave application to call the function i2c_slave_receive() as its own discretion. As i2c_slave_receive() is designed as a non-blocking interface. So the user needs to register callback i2c_slave_register_event_callbacks() to know when the receive has finished.
static IRAM_ATTR bool i2c_slave_rx_done_callback(i2c_slave_dev_handle_t channel, const i2c_slave_rx_done_event_data_t *edata, void *user_data)
{
BaseType_t high_task_wakeup = pdFALSE;
QueueHandle_t receive_queue = (QueueHandle_t)user_data;
xQueueSendFromISR(receive_queue, edata, &high_task_wakeup);
return high_task_wakeup == pdTRUE;
}
uint8_t *data_rd = (uint8_t *) malloc(DATA_LENGTH);
uint32_t size_rd = 0;
i2c_slave_config_t i2c_slv_config = {
.addr_bit_len = I2C_ADDR_BIT_LEN_7,
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.send_buf_depth = 256,
.scl_io_num = I2C_SLAVE_SCL_IO,
.sda_io_num = I2C_SLAVE_SDA_IO,
.slave_addr = 0x58,
};
i2c_slave_dev_handle_t slave_handle;
ESP_ERROR_CHECK(i2c_new_slave_device(&i2c_slv_config, &slave_handle));
s_receive_queue = xQueueCreate(1, sizeof(i2c_slave_rx_done_event_data_t));
i2c_slave_event_callbacks_t cbs = {
.on_recv_done = i2c_slave_rx_done_callback,
};
ESP_ERROR_CHECK(i2c_slave_register_event_callbacks(slave_handle, &cbs, s_receive_queue));
i2c_slave_rx_done_event_data_t rx_data;
ESP_ERROR_CHECK(i2c_slave_receive(slave_handle, data_rd, DATA_LENGTH));
xQueueReceive(s_receive_queue, &rx_data, pdMS_TO_TICKS(10000));
// Receive done.
Put Data In I2C Slave RAM
I2C slave fifo mentioned above can be used as RAM, which means user can access the RAM directly via address fields. For example, writing data to the 3rd ram block with following graph. Before using this, please note that i2c_slave_config_t::access_ram_en needs to be set to true.

Put data in I2C slave RAM
uint8_t data_rd[DATA_LENGTH_RAM] = {0};
i2c_slave_config_t i2c_slv_config = {
.addr_bit_len = I2C_ADDR_BIT_LEN_7,
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.send_buf_depth = 256,
.scl_io_num = I2C_SLAVE_SCL_IO,
.sda_io_num = I2C_SLAVE_SDA_IO,
.slave_addr = 0x58,
.flags.access_ram_en = true,
};
// Master write to slave.
i2c_slave_dev_handle_t slave_handle;
ESP_ERROR_CHECK(i2c_new_slave_device(&i2c_slv_config, &slave_handle));
ESP_ERROR_CHECK(i2c_slave_read_ram(slave_handle, 0x5, data_rd, DATA_LENGTH_RAM));
ESP_ERROR_CHECK(i2c_del_slave_device(slave_handle));
Get Data From I2C Slave RAM
Data can be stored in the RAM with a specific offset by the slave controller, and the master can read this data directly via the RAM address. For example, if the data is stored in 3rd ram block, master can read this data by following graph. Before using this, please note that i2c_slave_config_t::access_ram_en needs to be set to true.

Get data from I2C slave RAM
uint8_t data_wr[DATA_LENGTH_RAM] = {0};
i2c_slave_config_t i2c_slv_config = {
.addr_bit_len = I2C_ADDR_BIT_LEN_7,
.clk_source = I2C_CLK_SRC_DEFAULT,
.i2c_port = TEST_I2C_PORT,
.send_buf_depth = 256,
.scl_io_num = I2C_SLAVE_SCL_IO,
.sda_io_num = I2C_SLAVE_SDA_IO,
.slave_addr = 0x58,
.flags.access_ram_en = true,
};
i2c_slave_dev_handle_t slave_handle;
ESP_ERROR_CHECK(i2c_new_slave_device(&i2c_slv_config, &slave_handle));
ESP_ERROR_CHECK(i2c_slave_write_ram(slave_handle, 0x2, data_wr, DATA_LENGTH_RAM));
ESP_ERROR_CHECK(i2c_del_slave_device(slave_handle));
Register Event Callbacks
I2C master callbacks
When an I2C master bus triggers an interrupt, a specific event will be generated and notify the CPU. If you have some functions that need to be called when those events occurred, you can hook your functions to the ISR (Interrupt Service Routine) by calling i2c_master_register_event_callbacks(). Since the registered callback functions are called in the interrupt context, user should ensure the callback function doesn't attempt to block (e.g. by making sure that only FreeRTOS APIs with ISR suffix are called from within the function). The callback functions are required to return a boolean value, to tell the ISR whether a high priority task is woke up by it.
I2C master event callbacks are listed in the i2c_master_event_callbacks_t.
Although I2C is a synchronous communication protocol, we also support asynchronous behavior by registering above callback. In this way, I2C APIs will be non-blocking interface. But note that on the same bus, only one device can adopt asynchronous operation.
Important
I2C master asynchronous transaction is still an experimental feature. (The issue is when asynchronous transaction is very large, it will cause memory problem.)
i2c_master_event_callbacks_t::on_recv_donesets a callback function for master "transaction-done" event. The function prototype is declared ini2c_master_callback_t.
I2C slave callbacks
When an I2C slave bus triggers an interrupt, a specific event will be generated and notify the CPU. If you have some function that needs to be called when those events occurred, you can hook your function to the ISR (Interrupt Service Routine) by calling i2c_slave_register_event_callbacks(). Since the registered callback functions are called in the interrupt context, user should ensure the callback function doesn't attempt to block (e.g. by making sure that only FreeRTOS APIs with ISR suffix are called from within the function). The callback function has a boolean return value, to tell the caller whether a high priority task is woke up by it.
I2C slave event callbacks are listed in the i2c_slave_event_callbacks_t.
i2c_slave_event_callbacks_t::on_recv_donesets a callback function for "receive-done" event. The function prototype is declared ini2c_slave_received_callback_t.i2c_slave_event_callbacks_t::on_stretch_occursets a callback function for "stretch" cause. The function prototype is declared ini2c_slave_stretch_callback_t.
Power Management
If the controller clock source is selected to I2C_CLK_SRC_XTAL, then the driver won't install power management lock for it, which is more suitable for a low power application as long as the source clock can still provide sufficient resolution.
IRAM Safe
By default, the I2C interrupt will be deferred when the Cache is disabled for reasons like writing/erasing Flash. Thus the event callback functions will not get executed in time, which is not expected in a real-time application.
There's a Kconfig option CONFIG_I2C_ISR_IRAM_SAFE that will:
Enable the interrupt being serviced even when cache is disabled
Place all functions that used by the ISR into IRAM
Place driver object into DRAM (in case it's mapped to PSRAM by accident)
This will allow the interrupt to run while the cache is disabled but will come at the cost of increased IRAM consumption.
Thread Safety
The factory function i2c_new_master_bus() and i2c_new_slave_device() are guaranteed to be thread safe by the driver, which means, user can call them from different RTOS tasks without protection by extra locks. Other public I2C APIs are not thread safe. which means the user should avoid calling them from multiple tasks, if user strongly needs to call them in multiple tasks, please add extra lock.
Kconfig Options
CONFIG_I2C_ISR_IRAM_SAFE controls whether the default ISR handler can work when cache is disabled, see also IRAM Safe for more information.
CONFIG_I2C_ENABLE_DEBUG_LOG is used to enable the debug log at the cost of increased firmware binary size.
API Reference
Header File
This header file can be included with:
#include "driver/i2c_master.h"
This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:REQUIRES driver
or
PRIV_REQUIRES driver
Functions
-
esp_err_t i2c_new_master_bus(const i2c_master_bus_config_t *bus_config, i2c_master_bus_handle_t *ret_bus_handle)
Allocate an I2C master bus.
- Parameters
bus_config -- [in] I2C master bus configuration.
ret_bus_handle -- [out] I2C bus handle
- Returns
ESP_OK: I2C master bus initialized successfully.
ESP_ERR_INVALID_ARG: I2C bus initialization failed because of invalid argument.
ESP_ERR_NO_MEM: Create I2C bus failed because of out of memory.
ESP_ERR_NOT_FOUND: No more free bus.
-
esp_err_t i2c_master_bus_add_device(i2c_master_bus_handle_t bus_handle, const i2c_device_config_t *dev_config, i2c_master_dev_handle_t *ret_handle)
Add I2C master BUS device.
- Parameters
bus_handle -- [in] I2C bus handle.
dev_config -- [in] device config.
ret_handle -- [out] device handle.
- Returns
ESP_OK: Create I2C master device successfully.
ESP_ERR_INVALID_ARG: I2C bus initialization failed because of invalid argument.
ESP_ERR_NO_MEM: Create I2C bus failed because of out of memory.
-
esp_err_t i2c_del_master_bus(i2c_master_bus_handle_t bus_handle)
Deinitialize the I2C master bus and delete the handle.
- Parameters
bus_handle -- [in] I2C bus handle.
- Returns
ESP_OK: Delete I2C bus success, otherwise, failed.
Otherwise: Some module delete failed.
-
esp_err_t i2c_master_bus_rm_device(i2c_master_dev_handle_t handle)
I2C master bus delete device.
- Parameters
handle -- i2c device handle
- Returns
ESP_OK: If device is successfully deleted.
-
esp_err_t i2c_master_transmit(i2c_master_dev_handle_t i2c_dev, const uint8_t *write_buffer, size_t write_size, int xfer_timeout_ms)
Perform a write transaction on the I2C bus. The transaction will be undergoing until it finishes or it reaches the timeout provided.
Note
If a callback was registered with
i2c_master_register_event_callbacks, the transaction will be asynchronous, and thus, this function will return directly, without blocking. You will get finish information from callback. Besides, data buffer should always be completely prepared when callback is registered, otherwise, the data will get corrupt.- Parameters
i2c_dev -- [in] I2C master device handle that created by
i2c_master_bus_add_device.write_buffer -- [in] Data bytes to send on the I2C bus.
write_size -- [in] Size, in bytes, of the write buffer.
xfer_timeout_ms -- [in] Wait timeout, in ms. Note: -1 means wait forever.
- Returns
ESP_OK: I2C master transmit success
ESP_ERR_INVALID_ARG: I2C master transmit parameter invalid.
ESP_ERR_TIMEOUT: Operation timeout(larger than xfer_timeout_ms) because the bus is busy or hardware crash.
-
esp_err_t i2c_master_transmit_receive(i2c_master_dev_handle_t i2c_dev, const uint8_t *write_buffer, size_t write_size, uint8_t *read_buffer, size_t read_size, int xfer_timeout_ms)
Perform a write-read transaction on the I2C bus. The transaction will be undergoing until it finishes or it reaches the timeout provided.
Note
If a callback was registered with
i2c_master_register_event_callbacks, the transaction will be asynchronous, and thus, this function will return directly, without blocking. You will get finish information from callback. Besides, data buffer should always be completely prepared when callback is registered, otherwise, the data will get corrupt.- Parameters
i2c_dev -- [in] I2C master device handle that created by
i2c_master_bus_add_device.write_buffer -- [in] Data bytes to send on the I2C bus.
write_size -- [in] Size, in bytes, of the write buffer.
read_buffer -- [out] Data bytes received from i2c bus.
read_size -- [in] Size, in bytes, of the read buffer.
xfer_timeout_ms -- [in] Wait timeout, in ms. Note: -1 means wait forever.
- Returns
ESP_OK: I2C master transmit-receive success
ESP_ERR_INVALID_ARG: I2C master transmit parameter invalid.
ESP_ERR_TIMEOUT: Operation timeout(larger than xfer_timeout_ms) because the bus is busy or hardware crash.
-
esp_err_t i2c_master_receive(i2c_master_dev_handle_t i2c_dev, uint8_t *read_buffer, size_t read_size, int xfer_timeout_ms)
Perform a read transaction on the I2C bus. The transaction will be undergoing until it finishes or it reaches the timeout provided.
Note
If a callback was registered with
i2c_master_register_event_callbacks, the transaction will be asynchronous, and thus, this function will return directly, without blocking. You will get finish information from callback. Besides, data buffer should always be completely prepared when callback is registered, otherwise, the data will get corrupt.- Parameters
i2c_dev -- [in] I2C master device handle that created by
i2c_master_bus_add_device.read_buffer -- [out] Data bytes received from i2c bus.
read_size -- [in] Size, in bytes, of the read buffer.
xfer_timeout_ms -- [in] Wait timeout, in ms. Note: -1 means wait forever.
- Returns
ESP_OK: I2C master receive success
ESP_ERR_INVALID_ARG: I2C master receive parameter invalid.
ESP_ERR_TIMEOUT: Operation timeout(larger than xfer_timeout_ms) because the bus is busy or hardware crash.
-
esp_err_t i2c_master_probe(i2c_master_bus_handle_t bus_handle, uint16_t address, int xfer_timeout_ms)
Probe I2C address, if address is correct and ACK is received, this function will return ESP_OK.
- Attention
Pull-ups must be connected to the SCL and SDA pins when this function is called. If you get
ESP_ERR_TIMEOUT whilexfer_timeout_mswas parsed correctly, you should check the pull-up resistors. If you do not have proper resistors nearby.flags.enable_internal_pullup` is also acceptable.
Note
The principle of this function is to sent device address with a write command. If the device on your I2C bus, there would be an ACK signal and function returns
ESP_OK. If the device is not on your I2C bus, there would be a NACK signal and function returnsESP_ERR_NOT_FOUND.ESP_ERR_TIMEOUTis not an expected failure, which indicated that the i2c probe not works properly, usually caused by pull-up resistors not be connected properly. Suggestion check data on SDA/SCL line to see whether there is ACK/NACK signal is on line when i2c probe function fails.Note
There are lots of I2C devices all over the world, we assume that not all I2C device support the behavior like
device_address+nack/ack. So, if the on line data is strange and no ack/nack got respond. Please check the device datasheet.- Parameters
bus_handle -- [in] I2C master bus handle, created by
i2c_new_master_bus.address -- [in] I2C device address that you want to probe.
xfer_timeout_ms -- [in] Wait timeout, in ms. Note: -1 means wait forever (Not recommended in this function).
- Returns
ESP_OK: I2C device probe successfully
ESP_ERR_NOT_FOUND: I2C probe failed, doesn't find the device with specific address you gave.
ESP_ERR_TIMEOUT: Operation timeout(larger than xfer_timeout_ms) because the bus is busy or hardware crash.
-
esp_err_t i2c_master_execute_defined_operations(i2c_master_dev_handle_t i2c_dev, i2c_operation_job_t *i2c_operation, size_t operation_list_num, int xfer_timeout_ms)
Execute a series of pre-defined I2C operations.
This function processes a list of I2C operations, such as start, write, read, and stop, according to the user-defined
i2c_operation_job_tarray. It performs these operations sequentially on the specified I2C master device.Note
The
ack_valuefield in the READ operation must be set toI2C_NACK_VALif the next operation is a STOP command.- Parameters
i2c_dev -- [in] Handle to the I2C master device.
i2c_operation -- [in] Pointer to an array of user-defined I2C operation jobs. Each job specifies a command and associated parameters.
operation_list_num -- [in] The number of operations in the
i2c_operationarray.xfer_timeout_ms -- [in] Timeout for the transaction, in milliseconds.
- Returns
ESP_OK: Transaction completed successfully.
ESP_ERR_INVALID_ARG: One or more arguments are invalid.
ESP_ERR_TIMEOUT: Transaction timed out.
ESP_FAIL: Other error during transaction.
-
esp_err_t i2c_master_register_event_callbacks(i2c_master_dev_handle_t i2c_dev, const i2c_master_event_callbacks_t *cbs, void *user_data)
Register I2C transaction callbacks for a master device.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.Note
When CONFIG_I2C_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well. The
user_datashould also reside in SRAM.Note
If the callback is used for helping asynchronous transaction. On the same bus, only one device can be used for performing asynchronous operation.
- Parameters
i2c_dev -- [in] I2C master device handle that created by
i2c_master_bus_add_device.cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns
ESP_OK: Set I2C transaction callbacks successfully
ESP_ERR_INVALID_ARG: Set I2C transaction callbacks failed because of invalid argument
ESP_FAIL: Set I2C transaction callbacks failed because of other error
-
esp_err_t i2c_master_bus_reset(i2c_master_bus_handle_t bus_handle)
Reset the I2C master bus.
- Parameters
bus_handle -- I2C bus handle.
- Returns
ESP_OK: Reset succeed.
ESP_ERR_INVALID_ARG: I2C master bus handle is not initialized.
Otherwise: Reset failed.
-
esp_err_t i2c_master_bus_wait_all_done(i2c_master_bus_handle_t bus_handle, int timeout_ms)
Wait for all pending I2C transactions done.
- Parameters
bus_handle -- [in] I2C bus handle
timeout_ms -- [in] Wait timeout, in ms. Specially, -1 means to wait forever.
- Returns
ESP_OK: Flush transactions successfully
ESP_ERR_INVALID_ARG: Flush transactions failed because of invalid argument
ESP_ERR_TIMEOUT: Flush transactions failed because of timeout
ESP_FAIL: Flush transactions failed because of other error
-
esp_err_t i2c_master_get_bus_handle(i2c_port_num_t port_num, i2c_master_bus_handle_t *ret_handle)
Retrieves the I2C master bus handle for a specified I2C port number.
This function retrieves the I2C master bus handle for the given I2C port number. Please make sure the handle has already been initialized, and this function would simply returns the existing handle. Note that the returned handle still can't be used concurrently
- Parameters
port_num -- I2C port number for which the handle is to be retrieved.
ret_handle -- Pointer to a variable where the retrieved handle will be stored.
- Returns
ESP_OK: Success. The handle is retrieved successfully.
ESP_ERR_INVALID_ARG: Invalid argument, such as invalid port number
ESP_ERR_INVALID_STATE: Invalid state, such as the I2C port is not initialized.
Structures
-
struct i2c_master_bus_config_t
I2C master bus specific configurations.
Public Members
-
i2c_port_num_t i2c_port
I2C port number,
-1for auto selecting
-
gpio_num_t sda_io_num
GPIO number of I2C SDA signal, pulled-up internally
-
gpio_num_t scl_io_num
GPIO number of I2C SCL signal, pulled-up internally
-
i2c_clock_source_t clk_source
Clock source of I2C master bus, channels in the same group must use the same clock source
-
uint8_t glitch_ignore_cnt
If the glitch period on the line is less than this value, it can be filtered out, typically value is 7 (unit: I2C module clock cycle)
-
int intr_priority
I2C interrupt priority, if set to 0, driver will select the default priority (1,2,3).
-
size_t trans_queue_depth
Depth of internal transfer queue, increase this value can support more transfers pending in the background, only valid in asynchronous transaction. (Typically max_device_num * per_transaction)
-
uint32_t enable_internal_pullup
Enable internal pullups. Note: This is not strong enough to pullup buses under high-speed frequency. Recommend proper external pull-up if possible
-
struct i2c_master_bus_config_t::[anonymous] flags
I2C master config flags
-
i2c_port_num_t i2c_port
-
struct i2c_device_config_t
I2C device configuration.
Public Members
-
i2c_addr_bit_len_t dev_addr_length
Select the address length of the slave device.
-
uint16_t device_address
I2C device raw address. (The 7/10 bit address without read/write bit). Macro I2C_DEVICE_ADDRESS_NOT_USED (0xFFFF) stands for skip the address config inside driver.
-
uint32_t scl_speed_hz
I2C SCL line frequency.
-
uint32_t scl_wait_us
Timeout value. (unit: us). Please note this value should not be so small that it can handle stretch/disturbance properly. If 0 is set, that means use the default reg value
-
uint32_t disable_ack_check
Disable ACK check. If this is set false, that means ack check is enabled, the transaction will be stoped and API returns error when nack is detected.
-
struct i2c_device_config_t::[anonymous] flags
I2C device config flags
-
i2c_addr_bit_len_t dev_addr_length
-
struct i2c_operation_job_t
Structure representing an I2C operation job.
This structure is used to define individual I2C operations (write or read) within a sequence of I2C master transactions.
Public Members
-
i2c_master_command_t command
I2C command indicating the type of operation (START, WRITE, READ, or STOP)
-
bool ack_check
Whether to enable ACK check during WRITE operation
-
uint8_t *data
Pointer to the data to be written
Pointer to the buffer for storing the data read from the bus
-
size_t total_bytes
Total number of bytes to write
Total number of bytes to read
-
struct i2c_operation_job_t::[anonymous]::[anonymous] write
Structure for WRITE command.
Used when the
commandis set toI2C_MASTER_CMD_WRITE.
-
i2c_ack_value_t ack_value
ACK value to send after the read (ACK or NACK)
-
struct i2c_operation_job_t::[anonymous]::[anonymous] read
Structure for READ command.
Used when the
commandis set toI2C_MASTER_CMD_READ.
-
i2c_master_command_t command
-
struct i2c_master_event_callbacks_t
Group of I2C master callbacks, can be used to get status during transaction or doing other small things. But take care potential concurrency issues.
Note
The callbacks are all running under ISR context
Note
When CONFIG_I2C_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well.
Public Members
-
i2c_master_callback_t on_trans_done
I2C master transaction finish callback
-
i2c_master_callback_t on_trans_done
Macros
-
I2C_DEVICE_ADDRESS_NOT_USED
Skip carry address bit in driver transmit and receive
Header File
This header file can be included with:
#include "driver/i2c_slave.h"
This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:REQUIRES driver
or
PRIV_REQUIRES driver
Functions
-
esp_err_t i2c_new_slave_device(const i2c_slave_config_t *slave_config, i2c_slave_dev_handle_t *ret_handle)
Initialize an I2C slave device.
- Parameters
slave_config -- [in] I2C slave device configurations
ret_handle -- [out] Return a generic I2C device handle
- Returns
ESP_OK: I2C slave device initialized successfully
ESP_ERR_INVALID_ARG: I2C device initialization failed because of invalid argument.
ESP_ERR_NO_MEM: Create I2C device failed because of out of memory.
-
esp_err_t i2c_del_slave_device(i2c_slave_dev_handle_t i2c_slave)
Deinitialize the I2C slave device.
- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.- Returns
ESP_OK: Delete I2C device successfully.
ESP_ERR_INVALID_ARG: I2C device initialization failed because of invalid argument.
-
esp_err_t i2c_slave_receive(i2c_slave_dev_handle_t i2c_slave, uint8_t *data, size_t buffer_size)
Read bytes from I2C internal buffer. Start a job to receive I2C data.
Note
This function is non-blocking, it initiates a new receive job and then returns. User should check the received data from the
on_recv_donecallback that registered byi2c_slave_register_event_callbacks().- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.data -- [out] Buffer to store data from I2C fifo. Should be valid until
on_recv_doneis triggered.buffer_size -- [in] Buffer size of data that provided by users.
- Returns
ESP_OK: I2C slave receive success.
ESP_ERR_INVALID_ARG: I2C slave receive parameter invalid.
ESP_ERR_NOT_SUPPORTED: This function should be work in fifo mode, but I2C_SLAVE_NONFIFO mode is configured
-
esp_err_t i2c_slave_transmit(i2c_slave_dev_handle_t i2c_slave, const uint8_t *data, int size, int xfer_timeout_ms)
Write bytes to internal ringbuffer of the I2C slave data. When the TX fifo empty, the ISR will fill the hardware FIFO with the internal ringbuffer's data.
Note
If you connect this slave device to some master device, the data transaction direction is from slave device to master device.
- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.data -- [in] Buffer to write to slave fifo, can pickup by master. Can be freed after this function returns. Equal or larger than
size.size -- [in] In bytes, of
databuffer.xfer_timeout_ms -- [in] Wait timeout, in ms. Note: -1 means wait forever.
- Returns
ESP_OK: I2C slave transmit success.
ESP_ERR_INVALID_ARG: I2C slave transmit parameter invalid.
ESP_ERR_TIMEOUT: Operation timeout(larger than xfer_timeout_ms) because the device is busy or hardware crash.
ESP_ERR_NOT_SUPPORTED: This function should be work in fifo mode, but I2C_SLAVE_NONFIFO mode is configured
-
esp_err_t i2c_slave_register_event_callbacks(i2c_slave_dev_handle_t i2c_slave, const i2c_slave_event_callbacks_t *cbs, void *user_data)
Set I2C slave event callbacks for I2C slave channel.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
cbsstructure to NULL.Note
When CONFIG_I2C_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well. The
user_datashould also reside in SRAM.- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.cbs -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns
ESP_OK: Set I2C transaction callbacks successfully
ESP_ERR_INVALID_ARG: Set I2C transaction callbacks failed because of invalid argument
ESP_FAIL: Set I2C transaction callbacks failed because of other error
-
esp_err_t i2c_slave_read_ram(i2c_slave_dev_handle_t i2c_slave, uint8_t ram_address, uint8_t *data, size_t receive_size)
Read bytes from I2C internal ram. This can be only used when
access_ram_enin configuration structure set to true.- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.ram_address -- [in] The offset of RAM (Cannot larger than I2C RAM memory)
data -- [out] Buffer to store data read from I2C ram.
receive_size -- [in] Received size from RAM.
- Returns
ESP_OK: I2C slave transmit success.
ESP_ERR_INVALID_ARG: I2C slave transmit parameter invalid.
ESP_ERR_NOT_SUPPORTED: This function should be work in non-fifo mode, but I2C_SLAVE_FIFO mode is configured
-
esp_err_t i2c_slave_write_ram(i2c_slave_dev_handle_t i2c_slave, uint8_t ram_address, const uint8_t *data, size_t size)
Write bytes to I2C internal ram. This can be only used when
access_ram_enin configuration structure set to true.- Parameters
i2c_slave -- [in] I2C slave device handle that created by
i2c_new_slave_device.ram_address -- [in] The offset of RAM (Cannot larger than I2C RAM memory)
data -- [in] Buffer to fill.
size -- [in] Received size from RAM.
- Returns
ESP_OK: I2C slave transmit success.
ESP_ERR_INVALID_ARG: I2C slave transmit parameter invalid.
ESP_ERR_INVALID_SIZE: Write size is larger than
ESP_ERR_NOT_SUPPORTED: This function should be work in non-fifo mode, but I2C_SLAVE_FIFO mode is configured
Structures
-
struct i2c_slave_config_t
I2C slave specific configurations.
Public Members
-
i2c_port_num_t i2c_port
I2C port number,
-1for auto selecting
-
gpio_num_t sda_io_num
SDA IO number used by I2C bus
-
gpio_num_t scl_io_num
SCL IO number used by I2C bus
-
i2c_clock_source_t clk_source
Clock source of I2C bus.
-
uint32_t send_buf_depth
Depth of internal transfer ringbuffer, increase this value can support more transfers pending in the background
-
uint16_t slave_addr
I2C slave address
-
i2c_addr_bit_len_t addr_bit_len
I2C slave address in bit length
-
int intr_priority
I2C interrupt priority, if set to 0, driver will select the default priority (1,2,3).
-
uint32_t stretch_en
Enable slave stretch
-
uint32_t broadcast_en
I2C slave enable broadcast
-
uint32_t access_ram_en
Can get access to I2C RAM directly
-
uint32_t slave_unmatch_en
Can trigger unmatch interrupt when slave address does not match what master sends
-
struct i2c_slave_config_t::[anonymous] flags
I2C slave config flags
-
i2c_port_num_t i2c_port
-
struct i2c_slave_event_callbacks_t
Group of I2C slave callbacks (e.g. get i2c slave stretch cause). But take care of potential concurrency issues.
Note
The callbacks are all running under ISR context
Note
When CONFIG_I2C_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well.
Public Members
-
i2c_slave_stretch_callback_t on_stretch_occur
I2C slave stretched callback
-
i2c_slave_received_callback_t on_recv_done
I2C slave receive done callback
-
i2c_slave_stretch_callback_t on_stretch_occur
Header File
This header file can be included with:
#include "driver/i2c_types.h"
This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:REQUIRES driver
or
PRIV_REQUIRES driver
Structures
-
struct i2c_master_event_data_t
Data type used in I2C event callback.
Public Members
-
i2c_master_event_t event
The I2C hardware event that I2C callback is called.
-
i2c_master_event_t event
-
struct i2c_slave_rx_done_event_data_t
Event structure used in I2C slave.
Public Members
-
uint8_t *buffer
Pointer for buffer received in callback.
-
uint8_t *buffer
-
struct i2c_slave_stretch_event_data_t
Stretch cause event structure used in I2C slave.
Public Members
-
i2c_slave_stretch_cause_t stretch_cause
Stretch cause can be got in callback
-
i2c_slave_stretch_cause_t stretch_cause
Type Definitions
-
typedef int i2c_port_num_t
I2C port number.
-
typedef struct i2c_master_bus_t *i2c_master_bus_handle_t
Type of I2C master bus handle.
-
typedef struct i2c_master_dev_t *i2c_master_dev_handle_t
Type of I2C master bus device handle.
-
typedef struct i2c_slave_dev_t *i2c_slave_dev_handle_t
Type of I2C slave device handle.
-
typedef bool (*i2c_master_callback_t)(i2c_master_dev_handle_t i2c_dev, const i2c_master_event_data_t *evt_data, void *arg)
An callback for I2C transaction.
- Param i2c_dev
[in] Handle for I2C device.
- Param evt_data
[out] I2C capture event data, fed by driver
- Param arg
[in] User data, set in
i2c_master_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
-
typedef bool (*i2c_slave_received_callback_t)(i2c_slave_dev_handle_t i2c_slave, const i2c_slave_rx_done_event_data_t *evt_data, void *arg)
Callback signature for I2C slave.
- Param i2c_slave
[in] Handle for I2C slave.
- Param evt_data
[out] I2C capture event data, fed by driver
- Param arg
[in] User data, set in
i2c_slave_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
-
typedef bool (*i2c_slave_stretch_callback_t)(i2c_slave_dev_handle_t i2c_slave, const i2c_slave_stretch_event_data_t *evt_cause, void *arg)
Callback signature for I2C slave stretch.
- Param i2c_slave
[in] Handle for I2C slave.
- Param evt_cause
[out] I2C capture event cause, fed by driver
- Param user_ctx
[in] User data, set in
i2c_slave_register_event_callbacks()- Return
Whether a high priority task has been waken up by this function
Enumerations
-
enum i2c_master_status_t
Enumeration for I2C fsm status.
Values:
-
enumerator I2C_STATUS_READ
read status for current master command
-
enumerator I2C_STATUS_WRITE
write status for current master command
-
enumerator I2C_STATUS_START
Start status for current master command
-
enumerator I2C_STATUS_STOP
stop status for current master command
-
enumerator I2C_STATUS_IDLE
idle status for current master command
-
enumerator I2C_STATUS_ACK_ERROR
ack error status for current master command
-
enumerator I2C_STATUS_DONE
I2C command done
-
enumerator I2C_STATUS_TIMEOUT
I2C bus status error, and operation timeout
-
enumerator I2C_STATUS_READ
-
enum i2c_master_event_t
Enumeration for I2C event.
Values:
-
enumerator I2C_EVENT_ALIVE
i2c bus in alive status.
-
enumerator I2C_EVENT_DONE
i2c bus transaction done
-
enumerator I2C_EVENT_NACK
i2c bus nack
-
enumerator I2C_EVENT_TIMEOUT
i2c bus timeout
-
enumerator I2C_EVENT_ALIVE
-
enum i2c_master_command_t
Enum for I2C master commands.
These commands are used to define the I2C master operations. They correspond to hardware-level commands supported by the I2C peripheral.
Values:
-
enumerator I2C_MASTER_CMD_START
Start or Restart condition
-
enumerator I2C_MASTER_CMD_WRITE
Write operation
-
enumerator I2C_MASTER_CMD_READ
Read operation
-
enumerator I2C_MASTER_CMD_STOP
Stop condition
-
enumerator I2C_MASTER_CMD_START
Header File
This header file can be included with:
#include "hal/i2c_types.h"
Structures
-
struct i2c_hal_clk_config_t
Data structure for calculating I2C bus timing.
Public Members
-
uint16_t clkm_div
I2C core clock devider
-
uint16_t scl_low
I2C scl low period
-
uint16_t scl_high
I2C scl hight period
-
uint16_t scl_wait_high
I2C scl wait_high period
-
uint16_t sda_hold
I2C scl low period
-
uint16_t sda_sample
I2C sda sample time
-
uint16_t setup
I2C start and stop condition setup period
-
uint16_t hold
I2C start and stop condition hold period
-
uint16_t tout
I2C bus timeout period
-
uint16_t clkm_div
Type Definitions
-
typedef soc_periph_i2c_clk_src_t i2c_clock_source_t
I2C group clock source.
Enumerations
-
enum i2c_port_t
I2C port number, can be I2C_NUM_0 ~ (I2C_NUM_MAX-1).
Values:
-
enumerator I2C_NUM_0
I2C port 0
-
enumerator LP_I2C_NUM_0
-
enumerator I2C_NUM_MAX
I2C port max
-
enumerator I2C_NUM_0
-
enum i2c_addr_bit_len_t
Enumeration for I2C device address bit length.
Values:
-
enumerator I2C_ADDR_BIT_LEN_7
i2c address bit length 7
-
enumerator I2C_ADDR_BIT_LEN_10
i2c address bit length 10
-
enumerator I2C_ADDR_BIT_LEN_7
-
enum i2c_mode_t
Values:
-
enumerator I2C_MODE_SLAVE
I2C slave mode
-
enumerator I2C_MODE_MASTER
I2C master mode
-
enumerator I2C_MODE_MAX
-
enumerator I2C_MODE_SLAVE
-
enum i2c_rw_t
Values:
-
enumerator I2C_MASTER_WRITE
I2C write data
-
enumerator I2C_MASTER_READ
I2C read data
-
enumerator I2C_MASTER_WRITE
-
enum i2c_trans_mode_t
Values:
-
enumerator I2C_DATA_MODE_MSB_FIRST
I2C data msb first
-
enumerator I2C_DATA_MODE_LSB_FIRST
I2C data lsb first
-
enumerator I2C_DATA_MODE_MAX
-
enumerator I2C_DATA_MODE_MSB_FIRST
-
enum i2c_addr_mode_t
Values:
-
enumerator I2C_ADDR_BIT_7
I2C 7bit address for slave mode
-
enumerator I2C_ADDR_BIT_10
I2C 10bit address for slave mode
-
enumerator I2C_ADDR_BIT_MAX
-
enumerator I2C_ADDR_BIT_7
-
enum i2c_ack_type_t
Values:
-
enumerator I2C_MASTER_ACK
I2C ack for each byte read
-
enumerator I2C_MASTER_NACK
I2C nack for each byte read
-
enumerator I2C_MASTER_LAST_NACK
I2C nack for the last byte
-
enumerator I2C_MASTER_ACK_MAX
-
enumerator I2C_MASTER_ACK
-
enum i2c_slave_stretch_cause_t
Enum for I2C slave stretch causes.
Values:
-
enumerator I2C_SLAVE_STRETCH_CAUSE_ADDRESS_MATCH
Stretching SCL low when the slave is read by the master and the address just matched
-
enumerator I2C_SLAVE_STRETCH_CAUSE_TX_EMPTY
Stretching SCL low when TX FIFO is empty in slave mode
-
enumerator I2C_SLAVE_STRETCH_CAUSE_RX_FULL
Stretching SCL low when RX FIFO is full in slave mode
-
enumerator I2C_SLAVE_STRETCH_CAUSE_SENDING_ACK
Stretching SCL low when slave sending ACK
-
enumerator I2C_SLAVE_STRETCH_CAUSE_ADDRESS_MATCH