方案架构
ESP-VISION 围绕 MicroPython 固件构建、板级硬件后端、共享平台服务以及面向 Python 的 视觉模块进行组织。代码按是否触及 MicroPython(mp_obj_t / py/*.h)进行分层。

ESP-VISION 分层架构总览
分层概览
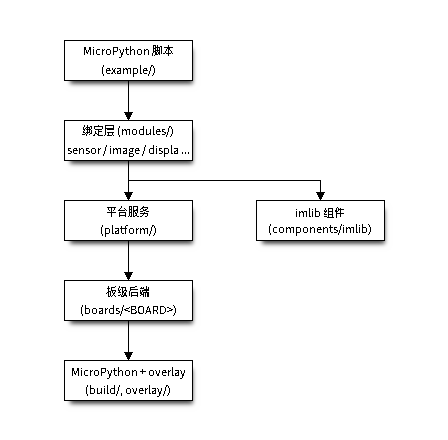
绑定层(
modules/):即USER_C_MODULES层。主要模块image、sensor、display、espdl和tflite通过MP_REGISTER_MODULE自注册。py_imageio.c提供image.ImageIO类型,py_helper.c为共享辅助代码。 绑定层只做对象转换与轻量 API 适配,重逻辑放在纯 C 或platform/中。平台服务(
platform/):自研的 ESP32 胶水层。ev_channel.c/ev_mux.c/ev_control_transport.c/ev_stdio.c(EV-MUX / EV-ATP 底层传输)、preview.c(EV-MUX JPEG 预览)、display.c(通用显示层)、sdcard.c(挂载到/sdcard)、usb_msc.c(通过 TinyUSB MSC 暴露ffat分区)、jpeg.c(硬件或软件 JPEG)、debug.c,以及main.c(启动初始化与软复位循环)。imlib 组件(
components/imlib/):纯 C 视觉算法,作为以 MIT 维护的 IDF 组件, 源自 OpenMVlib/imlib。板级后端(
boards/<BOARD>/):各板配置及真实的相机/显示/SD 卡实现。 P4X 与 S31 使用esp_video/V4L2,P4X 还使用 PPA;S3 使用esp32-camera。MicroPython + overlay:以 MicroPython v1.28.0 为固定基线;项目改动位于
overlay/micropython/,并应用到build/micropython/下的生成副本。
采集到输出的数据流
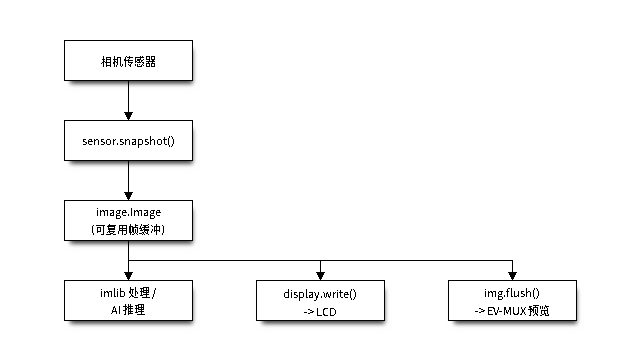
sensor.snapshot() 将一帧采集到可复用的帧缓冲中,并封装为 image.Image。脚本随后 对图像进行 imlib 处理、ESP-DL 推理或 TFLite Micro 推理,再通过 display.write() 送往 LCD,或通过 img.flush() 送往主机预览。
底层传输机制
ESP-VISION 的主机传输分为三层:物理 sink、路由 stream、EV-MUX 逻辑 channel。
物理 sink
platform/ev_channel.c 定义可写入的物理目标:
sink |
含义 |
|---|---|
|
USB-Serial-JTAG。在提供该外设的板卡上可用;没有 host 占用 USB-OTG CDC 时优先作为回退 sink。 |
|
USB-OTG CDC。在可用时,host 打开端口(DTR)即成为所有 stream 的自动路由。同时提供 MSC 文件预览。 |
|
用于运行时重定向( |
|
MicroPython stdout fallback。 |
|
丢弃输出; |
cdc 上报两种状态:present 表示 USB-OTG 接口已枚举;ready 表示有 host 占用端口(DTR 有效)。只有 ready 决定路由——设计中不存在激活 RPC、租约或心跳。
路由 stream
ev_stream_t 是物理路由面的抽象,数量少于 EV-MUX channel。路由操作的单位是完整 stream,而不是单个逻辑 channel:一个 stream 绑定到某个 sink 后,归属于该 stream 的所有 channel 都使用该 sink。Device -> Host 的帧写入该 sink;Host -> Device 的对应 channel 帧只接受从该 sink 进入。
所有 stream 的自动路由由同一条规则决定:host 占用 USB-OTG 端口(DTR)期间活跃 sink 为 ``cdc``,否则使用板级首选回退(有 USJ 时为 USJ,再回退到 console)。 专用 transport 任务监视 DTR 边沿并把它应用到全部两个 stream;每次切换都按 stream 发出 route.changed(reason 为 cdc_connected / cdc_disconnected)。host 断开或崩溃会释放 DTR,因此回退是自动的——无需任何保活。
stream |
承载内容 |
路由策略 |
|---|---|---|
|
正常工作面: |
跟随活跃 sink(上述 DTR 规则)。 |
|
调试与系统流量: |
跟随活跃 sink,因此已连接的 USB 端口承载所有逻辑 channel。 |
route.bind 把单个 stream 固定到某个 sink(运行时重定向,例如把 debug 重定向到 uart 做有线日志采集);手动绑定的 stream 脱离 DTR 规则,直到 route.auto 恢复自动路由。
EV-MUX channel
EV-MUX channel 是端到端协议语义面,不等同于物理端口。每个 channel 固定归属于一个 stream,host 不得为单个 channel 单独选择 sink。direction 描述帧方向;Device -> Host 按所属 stream 的当前 sink 输出,Host -> Device 则按所属 stream 的当前 sink 做入站授权。
channel |
direction |
所属 stream |
payload 类型 |
用途 |
|---|---|---|---|---|
|
双向 |
|
JSON |
正常工作控制,例如 |
|
双向 |
|
JSON; |
系统/调试 EV-ATP 请求、响应、事件、错误; |
|
Host -> Device |
|
text |
Host 输入到 REPL,不是输出 stream。 |
|
Host -> Device |
|
small binary/text |
Host 发送 Ctrl-C 等信号。 |
|
Device -> Host |
|
text |
Python |
|
Device -> Host |
|
text |
Python exception、C stderr。 |
|
Device -> Host |
|
text |
ESP-IDF |
|
Device -> Host |
|
binary JPEG |
|
EV-MUX 帧格式
所有 EV-MUX 帧都使用长度前缀,payload 可以是二进制:
\x1eEVMUX/1 h=<metadata_len> p=<payload_len> c=<crc32>\r\n
<metadata JSON bytes>
<payload bytes>
\x1f
h 与 p 是权威长度;0x1f 只作为帧尾保护与重同步辅助。固件生成的帧带有 payload CRC32。Host -> Device 的命令帧可以使用 c=00000000,固件接收端把 0 视为“跳过 CRC 校验”。
EV-ATP 控制
EV-ATP RPC 按语义拆分:
user.rpc承载 IDE 正常工作控制:hello、capabilities、script.write、script.run、device.control。debug.rpc承载系统/调试命令:transport.state、route.get、route.bind、route.auto、debug.info、debug.capture_frame。应答回到请求到达的 sink。debug.capture_frame的图片由debug.rpc应答帧自身携带(metadata 带contentType=image/jpeg与width/height),不存在独立的数据 channel。
route.changed 是 user.rpc / user 上的路由事件,不是 debug.rpc 事件。它报告 stream 级别的 sink 变化(reason 为 cdc_connected / cdc_disconnected),host 收到后必须更新该 stream 下所有 channel 的连接状态。
路由本身不需要任何 RPC:打开 USB-OTG 端口即成为活跃 sink,关闭则选择板级回退。设计中刻意不提供激活、租约或心跳方法——线路状态(DTR)就是完整的路由协议。
Host 对接契约
上位机同一时刻只使用一条物理 USB 连接;在双 USB 板卡上,USB-OTG 与 USJ 是等价单选项,任一端口都承载全部 channel。连接顺序如下:
打开所选端口。EV-MUX 上电默认启用,无需任何 REPL 访问:USB 链路出现时设备会发出 bootstrap
hello事件(每次软复位后也会重发)。发送 framed
hello请求(或消费启动事件),再请求capabilities;确认firmware.id为esp-vision,检查evMuxVersion,并协商固件声明的 feature/channel。正常使用设备:REPL channel、
script.write/script.run、预览、debug.rpc、log.idf全部在已打开的端口上可用。不存在激活步骤,也不存在心跳;端口即路由。断开时直接关闭端口即可。USB-OTG 端口关闭(或线缆脱落)后,所有 stream 自动选择板级回退,并发出
route.changed事件上报。
sensor.evmux() 保留为调试开关(例如用 sensor.evmux(False) 恢复纯文本 REPL);板级如需关闭上电默认启用,可在 boardconfig.h 把 ESP_VISION_EV_MUX_DEFAULT_ENABLED 定义为 0。
hello、capabilities 和 debug.info 的 device payload 都包含相同的 firmware 对象。其中稳定的 id 为 esp-vision;version 使用 ESP-IDF 根据 Git 自动生成的 PROJECT_VER:正式发布构建返回 YYYY.MM.DD tag,未打 tag 的开发构建带 -N-g<commit> 后缀(工作区构建还可能带 -dirty)。Host 可以用这个构建身份做版本展示和升级提示,但协议兼容性必须根据 evMuxVersion 与声明的 capabilities 判断,不能只比较发布版本字符串。
Host 的 demux 必须逐帧读取 metadata.channel,再按 channel 分发,不能依据端口或先前帧推断当前帧类型。推荐维护静态 channel -> stream 表和动态 stream -> sink 表;路由变化只更新后者。
接收分流原则
固件接收侧只保留字节流拼帧所需的状态。每个完整 EV-MUX 帧到达后,先根据实际入站 sink 校验其所属 stream,再立即按 metadata.channel / type / method 分流:
repl.stdin写入 REPL 输入环形缓冲。repl.signal调度键盘中断等信号。user.rpc/debug.rpc先选择 RPC domain,再按method执行 EV-ATP 控制逻辑。
入站授权是单一白名单:发现方法 hello / capabilities 在任一 USB sink 上都受理;其余 channel 只从所属 stream 的当前路由受理。显式 route.bind 到 UART 后,也可从 UART 接收 framed 控制。业务层不得依赖”当前模式”推断帧类型。
传输执行模型
EV-MUX 上电默认启用(ESP_VISION_EV_MUX_DEFAULT_ENABLED),控制面无需 REPL 访问即可探测;每次软复位后 mux 状态与路由都回到同一组确定初值。
帧接收不依赖 REPL。专用 transport 任务(ev_transport,见 platform/ev_control_transport.c)拥有接收路径:泵送 TinyUSB 设备栈、把 USJ/CDC/UART 三个入站环形缓冲喂给各 ingress 的帧 parser、分发完整帧,并应用 DTR 路由规则(活跃 sink 切换与 route.changed 发出)。mp_hal_stdin_rx_chr() 不再解析帧;EV-MUX 开启时它只消费 framed repl.stdin 字节。
分发按执行上下文拆分:
transport 任务 RPC(即使用户代码运行中也立即应答):
hello、capabilities、transport.state、route.*、device.control。repl.signal由 transport 任务调度键盘中断,host Ctrl-C 可以到达正在运行的脚本。VM 任务 RPC(排队到解释器,在
mp_hal_stdin_rx_chr()上下文执行):script.write、script.run、debug.info、debug.capture_frame——所有涉及 MicroPython 对象、VFS 或 camera 的方法。队列满时回复VM_BUSY错误。repl.stdinpayload 写入 framed REPL 输入环形缓冲,由 REPL 循环消费。
EV-MUX 开启后,所有物理字节流只承载帧:USJ/CDC/UART 底层接收路径不再把 0x03 解释为 Ctrl-C(中断语义只属于 framed repl.signal channel),不成帧的字节由帧 parser 的 SOF 重同步丢弃。
已知传输问题
以下 USB 传输问题已知,并与正常 EV-MUX / EV-ATP 路由契约分开跟踪:
USB MSC 当前通过 TinyUSB callback 直接暴露
ffat/vfs分区。MSC 写入尚未与 MicroPython VFS 或 IDE 文件写入协调,因此 host MSC 访问与脚本/文件操作并发时可能破坏文件系统。在写入协调实现前,MSC 应按只读能力处理,或与 IDE 文件写入互斥。
实现说明(保留观测手段):
帧写入使用带进度检测与明确超时的 bounded write-all loop(
platform/ev_mux.c);底层 sink 上报真实写字节数,partial write 会确定性地中止该帧并计入统计,而不是静默截断。预览帧是唯一的有损类别。写停滞的 sink 会被标记为拥塞并进入短暂冷却;拥塞期间
preview.frame帧在写入前整帧丢弃(ev_mux_write_lossy),因此线路上的字节流始终可解析。由于 USB-Serial-JTAG 吞吐远低于 OTG CDC,usj 路由下生产侧还把预览限速为每 100ms 一帧。RPC 与 REPL 帧永不被该机制丢弃。三个 ingress 输入环形缓冲均为 2048 字节。
debug.info的transport.statsscope(纯 C,VM 忙时仍可应答)上报每 ingress 的 RX 字节数与 ring 满事件、完整/畸形/拒绝帧计数,以及 replRx/VM_BUSY/TX 写超时/TX 拥塞丢弃(txDrop)计数。replRx 溢出目前只计数,尚无独立的 host overflow 事件。
源码结构
路径 |
职责 |
|---|---|
|
仓库根目录下板级感知的 |
|
集成枢纽:注册用户模块、平台与板级源文件、include 路径、条件性 |
|
固定版本的第三方子模块(MicroPython、 |
|
采用 MicroPython 路径布局的 ESP-VISION MicroPython 增量。 |
|
各板配置、冻结清单与板级外设后端。 |
|
共享运行时服务(相机、预览、存储、显示、USB、JPEG)。 |
|
MicroPython C/C++ 绑定( |
|
ESP-IDF 组件,包括 OpenMV |
|
运行时从板级存储加载的可选模型资源。 |
|
MicroPython 示例脚本。 |
|
描述 C 模块的 |
板卡的组成
一块开发板的定义集中在单棵目录树 boards/<BOARD>/ 中:
ESP-VISION 侧(顶层):
boardconfig.h、imlib_config.h、manifest.py,以及可选的camera.c/display.c/sdcard.c。MicroPython 移植侧(
boards/<BOARD>/port/):IDF 目标、sdkconfig、分区表、USB 字符串。构建时会将该子目录投射到生成的 MicroPython 副本的ports/esp32/boards/<BOARD>/。
完整步骤请参阅 添加新的开发板。
随芯片变化的源码
micropython.cmake 根据 IDF_TARGET 和板级配置选择模块。ESP32-P4 构建包含 h264 与 rtsp;当前 P4 板级配置还会启用 ZXing-C++ 条形码后端。最终公开 API 矩阵见 芯片与开发板支持。
MicroPython Overlay
ESP-VISION 以 MicroPython v1.28.0 作为固定上游基线。ESP32 port 的项目增量维护在 overlay/micropython/ 下。prepare-micropython 构建步骤会将其应用到 build/micropython/idf<ESP_IDF_VERSION>/micropython/ 下的生成副本; lib/micropython 子模块保持为干净的上游参考。