通信协议¶
通信层级结构¶
终端 |
手机/PC |
ESP-Drone |
应用层 |
APP |
飞控固件 |
协议层 |
CRTP |
CRTP |
传输层 |
UDP |
UDP |
物理层 |
Wi-Fi STA (Station) |
Wi-Fi AP (Access Point) |
Wi-Fi 通信¶
Wi-Fi 性能¶
ESP32 Wi-Fi 性能
项目 |
参数 |
|---|---|
模式 |
STA 模式、AP 模式、共存模式 |
协议 |
IEEE 802.11b、IEEE 802.11g、IEEE 802.11n、802.11 LR(乐鑫)支持软件切换 |
安全性 |
WPA、WPA2、WPA2-Enterprise、WPS |
主要特性 |
AMPDU、HT40、QoS |
支持距离 |
乐鑫专属协议下 1 km |
传输速率 |
20 Mbit/s TCP 吞吐量、30 Mbit/s UDP |
其它参数见 ESP32 Wi-Fi 特性列表。
ESP32-S2 Wi-Fi 性能
项目 |
参数 |
|---|---|
模式 |
STA 模式、AP 模式、共存模式 |
协议 |
IEEE 802.11b、IEEE 802.11g、IEEE 802.11n 支持软件切换 |
安全性 |
WPA、WPA2、WPA2-Enterprise、WPS |
主要特性 |
AMPDU、HT40、QoS |
支持距离 |
乐鑫专属协议下 1 km |
传输速率 |
20 Mbit/s TCP 吞吐量、30 Mbit/s UDP |
其他参数见 ESP32-S2 Wi-Fi 特性列表。
Wi-Fi 编程框架¶
基于 ESP-IDF 的 Wi-Fi 编程框架:
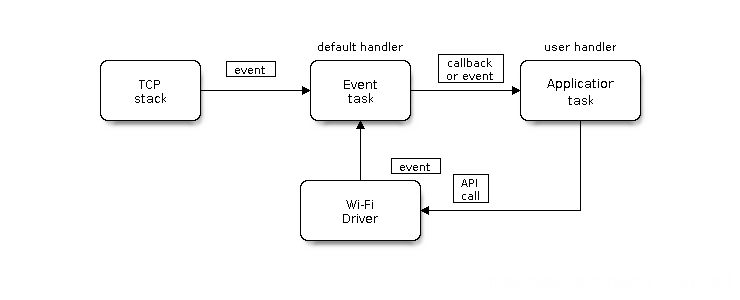
Wi-Fi 编程模型¶
一般使用过程如下:
应用层调用 Wi-Fi 驱动 API,进行 Wi-Fi 初始化。
Wi-Fi 驱动对开发人员透明。事件发生,则 Wi-Fi 驱动向默认事件循环:default event loop 发布
event。应用程序可根据需求编写handle程序,进行注册。网络接口组件 esp_netif 提供了一系列
handle程序,与 Wi-Fi 驱动event默认关联。例如 ESP32 作为 AP,当有用户接入时,esp_netif 将自动启动 DHCP 服务。
具体的使用过程,可查阅代码 \components\drivers\general\wifi\wifi_esp32.c。
注解
Wi-Fi 初始化之前应使用 WIFI_INIT_CONFIG_DEFAULT 获取初始化配置结构体,对该结构体进行个性化配置,然后进行初始化工作。请注意防范结构体成员未初始化导致的问题,在 ESP-IDF 更新添加了新的结构体成员时,应尤其特别注意这一问题。
AP 模式工作状态图:

AP 模式下 Wi-Fi Event 示例¶
提高 Wi-Fi 通信距离¶
依次进入:Component config>>PHY>>Max WiFi TX power (dBm),将 Max WiFi TX power 改为 20。该项配置将提高 PHY 增益,提高 Wi-Fi 通信距离。
UDP 通信¶
UDP 端口号¶
App |
方向 |
ESP-Drone |
|---|---|---|
192.168.43.42::2399 |
TX/RX |
192.168.43.42::2390 |
UDP 包结构¶
/* Frame format:
* +=============+-----+-----+
* | CRTP | CKSUM |
* +=============+-----+-----+
*/
UDP 传输的数据包为:CRTP + 校验信息。
CRTP:按照 CRTP 包结构定义,包含 Header + Data,具体参考 CRTP 协议部分。
CKSUM:为校验信息,大小为 1 byte,将 CRTP 包按照 byte 累加即可。
CKSUM 计算方法
#python为例:计算 raw 的 cksum,并将其添加到包尾
raw = (pk.header,) + pk.datat
cksum = 0
for i in raw:
cksum += i
cksum %= 256
raw = raw + (cksum,)
CRTP 协议¶
ESP-Drone 项目继承 Crazyflie 项目使用的 CRTP 协议,用于飞行指令发送、飞行数据回传、参数设置等。
CRTP 实现了无状态设计,不需要握手步骤。任何命令均可在任意时刻发送,但对于一些 log/param/mem 命令,需下载 TOC (目录),协助主机正确发送信息。已经实现的 Python API (cflib) 实现下载 param/log/mem TOC,确保能够使用所有功能。
CRTP 包结构¶
CRTP 包大小为 32 字节,其中包含一个字节的 Header,31 个字节的 Payload。Header 记录端口(4 位)、通道(2 位)、及保留位(2 位)。
7 6 5 4 3 2 1 0
+---+---+---+---+---+---+---+---+
| Port | Res. | Chan. |
+---+---+---+---+---+---+---+---+
| DATA 0 |
+---+---+---+---+---+---+---+---+
: : : : : : : : :
+---+---+---+---+---+---+---+---+
| DATA 30 |
+---+---+---+---+---+---+---+---+
字段 |
字节 |
位 |
描述 |
|---|---|---|---|
Header |
0 |
0 ~ 1 |
目标数据通道 |
0 |
2 ~ 3 |
保留,用于传输层 |
|
0 |
4 ~ 7 |
目标数据端口 |
|
Data |
1 ~ 31 |
0 ~ 7 |
数据包中的数据 |
端口分配¶
端口号 |
数据端口 |
用途 |
|---|---|---|
0 |
Console |
Console 使用 consoleprintf 函数将调试信息输出到 PC 端。 |
2 |
Parameters |
读写 Crazyflie 参数。参数可在源码中用宏表示。 |
3 |
Commander |
发送 roll/pitch/yaw/thrust 控制指令。 |
4 |
Memory access |
访问非易失性存储,如 1 线访问和 I2C 访问。仅支持 Crazyflie 2.0 |
5 |
Log |
设置日志变量。日志变量将定期发送至 Crazyflie,日志变量在 Crazyflie 源码中用宏表示。 |
6 |
Localization |
本地化相关包 |
7 |
Generic Setpoint |
运行发送定位点和控制模式 |
13 |
Platform |
用于 misc platform 控制,如调试和掉电等 |
14 |
Client-side debugging |
用于调试 PC 端 UI 界面程序,只针对 Crazyflie Python API。 |
15 |
Link layer |
用于控制和访问通信链路层。 |
固件中大部分连接到端口的模块,以任务的方式实现。如果有传入的 CRTP 包在信息传递队列中传递,则任务在队列中阻塞。启动时,每个任务及其它模块需要在通信链路层为预定义的端口注册。
各个端口使用详情可参考:CRTP - 与 Crazyflie 通信。
CRTP 协议支持包¶
cflib 是 CRTP 协议的 Python 支持包,提供了通信协议的应用层接口,可用于构建上位机,与 Crazyflie 和 Crazyflie 2.0 四轴飞行器通信并控制飞行器。固件中每一个使用 CRTP 协议的组件,在 cflib 中都有一个脚本与其对应。
源工程仓库地址:crazyflie-lib-python。
适配 ESP-Drone 的 cflib 工程仓库地址:qljz1993/crazyflie-lib-python。需要切换到
esplane分支。
基于 CRTP 协议的应用开发¶
各个平台工程模板¶
cfclient¶
cfclient 是 Crazeflie 源工程的上位机,完全实现了 CRTP 协议中定义的功能,可以加快飞机的调试过程。ESP-Drone 项目对该上位机进行裁剪和调整,满足功能设计需求。
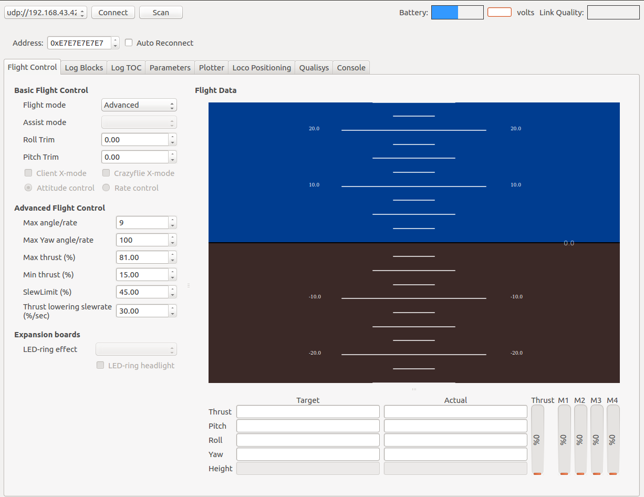
cfclient控制台界面¶
cfclient 具体使用说明可查阅:cfclient。