驱动程序¶
本节将主要介绍 ESP-Drone 中使用到的 I2C 驱动和 SPI 驱动。
I2C 设备驱动 (i2c_devices)¶
I2C 驱动涵盖 MPU6050 传感器驱动和 VL53LXX 传感器驱动。后续部分将从传感器主要特性、关键寄存器和编程注意事项进行介绍。
MPU6050 传感器¶
概述¶
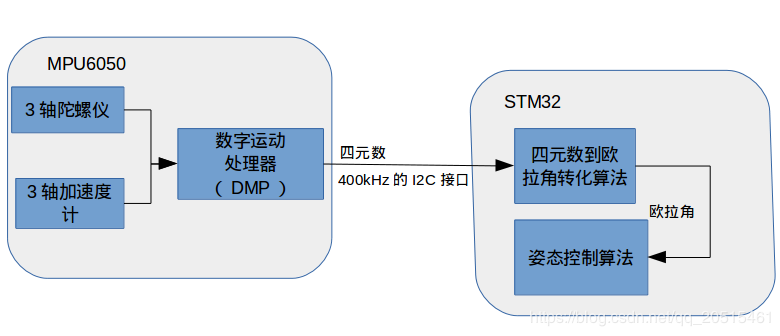
MPU6050 是一款整合性 6 轴运动处理组件,内带 3 轴陀螺仪、3 轴加速度传感器和数字运动处理器(DMP: Digital Motion Processor)。
工作原理
陀螺仪:当陀螺仪围绕任何感应轴旋转时,由于科里奥利效应,会产生振动。这种振动可以被电容式传感器检测到,传感器所得到的信号被放大,解调和滤波,产生与角速度成比例的电压。
电子加速度计:加速沿着一条特定轴在相应的检测质量上位移,则电容式传感器会检测到电容的变化。
测量范围
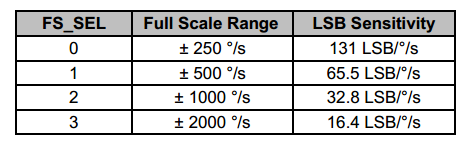
可配置陀螺仪测量范围:±250 °/sec、±500 °/sec、±1000 °/sec、±2000 °/sec
可配置加速度计测量范围:±2 g、±4 g、±8 g、±16 g
AUX I2C 接口
MPU6050 具有一个辅助 I2C 总线,用于与片外 3-轴数字磁力计或其它传感器进行通信。
AUX I2C 接口支持两种工作模式:I2C Master 模式或 Pass-Through 模式。
MPU6050 FIFO
MPU6050 包含一个可通过串行接口访问的 1024 字节 FIFO 寄存器。FIFO 配置寄存器决定哪个数据写入 FIFO,包括:陀螺仪数据、加速计数据、温度读数、辅助传感器读数和 FSYNC 输入。
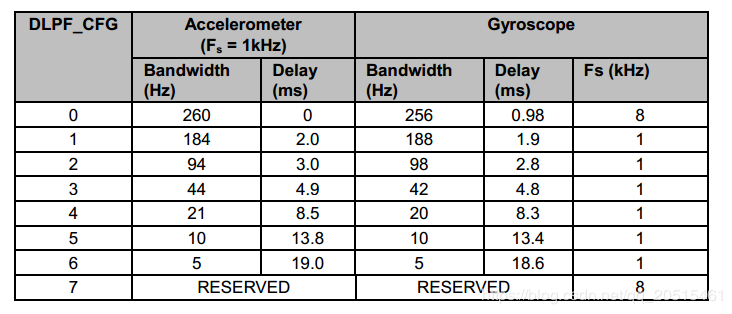
数字低通滤波器 (DLPF)
MPU6050 自带低通滤波器,可通过配置寄存器 26 控制低通滤波频段,减少高频干扰,但会降低传感器输入速率。开启 DLPF 加速度计输出 1 kHz,关闭 DLPF 可以输出 8 kHz。
FSYNC 帧同步采样管脚
寄存器 26 EXT_SYNC_SET,用于配置外部帧同步管脚的采样。
数字运动处理器 (DMP)
MPU6050 内部存在一个数字运动处理单元 (Digital Motion Processor, DMP),可以计算四元数等,减轻主 CPU 压力。
DMP 可通过管脚触发中断。
MPU6050 DMP¶
MPU6050 方向定义
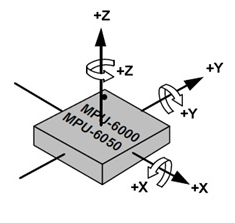
MPU6050 X、Y、Z 方向¶
MPU6050 初始化步骤¶
恢复寄存器默认值:设置 PWR_MGMT_1 bit7 为 1,恢复后 bit7 为 0,bit6 自动设置为 1,进入 sleep 模式;
设置 PWR_MGMT_1 bit6 为 0,唤醒传感器;
设置时钟源;
设置量程:分别设置陀螺仪和加速度计量程;
设置采样率;
设置数字低通滤波器(可选)。
MPU6050 关键寄存器¶
寄存器典型值
寄存器 |
典型值 |
功能 |
|---|---|---|
PWR_MGMT_1 |
0x00 |
正常启用 |
SMPLRT_DIV |
0x07 |
陀螺仪采样率 125 Hz |
CONFIG |
0x06 |
低通滤波器频率为 5 Hz |
GYRO_CONFIG |
0x18 |
陀螺仪不自检,输出满量程范围为 ±2000 °/s |
ACCEL_CONFIG |
0x01 |
加速度计不自检,输出的满量程范围为 ±2 g |
寄存器 117 WHO_AM_I - 设备地址
[6:1] 保存设备地址,默认为 0x68,不反映 AD0 管脚值。

寄存器 107 PWR_MGMT_1 - 电源管理 1

DEVICE_RESET:置位此位,则寄存器使用默认值。
SLEEP:置位此位,则 MPU6050 将置于睡眠模式。
CYCLE:置位此位,且 SLEEP 设置为禁用时,MPU6050 将进入循环模式 (CYCLE)。在循环模式下,MPU6050 进入睡眠,达到 LP_WAKE_CTRL(寄存器 108)设定的时间后,从睡眠模式唤醒,完成一次对活动传感器的采样,然后再进入睡眠模式,依次循环。
寄存器 26 CONFIG - 配置数字低通滤波器

数字低通滤波器 (DLPF) 取值与滤波频段关系如下:
寄存器 27 - GYRO_CONFIG 陀螺仪量程配置

XG_ST:X 轴陀螺仪自检
FS_SEL:用于配置陀螺仪量程,具体信息见下表:
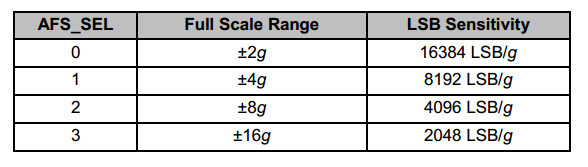
寄存器 28 ACCEL_CONFIG - 配置加速度计量程

寄存器 25 SMPRT_DIV - 采样速率分频器
该寄存器指定陀螺仪输出速率的分频器,用于为 MPU6050 生成采样速率。传感器寄存器的输出、FIFO 输出和 DMP 采样都是基于采样率。陀螺仪输出速率除以 (1 + SMPLRT_DIV) 得到采样率,公式如下:

Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV)
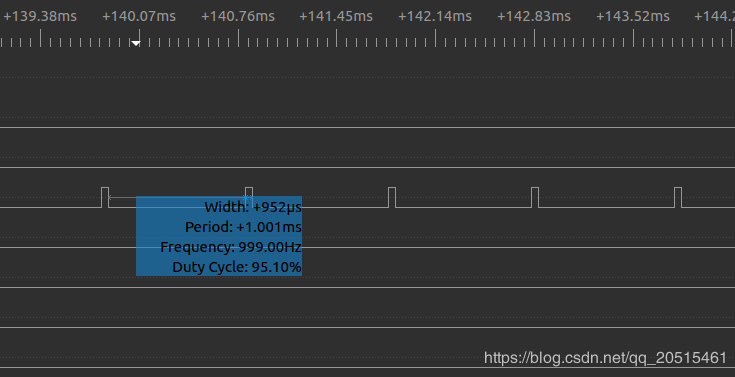
其中,当 DLPF 禁用时,即 DLPF_CFG = 0 或 7 时,陀螺仪输出速率为 8 kHz;当 DLPE 使能时,见寄存器 26,陀螺仪输出速率为 1 kHz。注意,在不开启 DLPF 的情况下,设置 SMPLRT_DIV 为 7 可以使芯片产生 1kHz 的中断信号。
寄存器 59 ~ 64 - 加速度计测量值
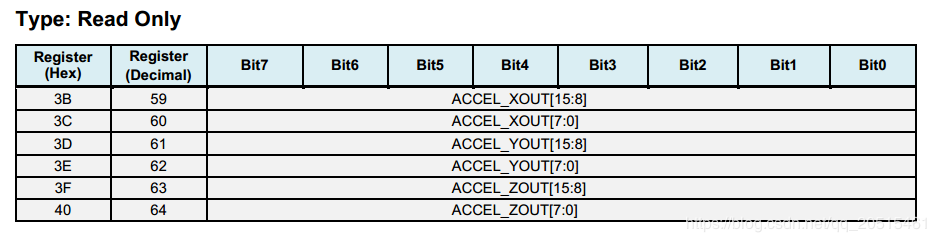
大端序存放:地址低位存放数据高位,地址高位存放数据低位。
补码存放:测量值为有符号整数,因此采用补码方式存放。
寄存器 65 ~ 66 - 温度测量

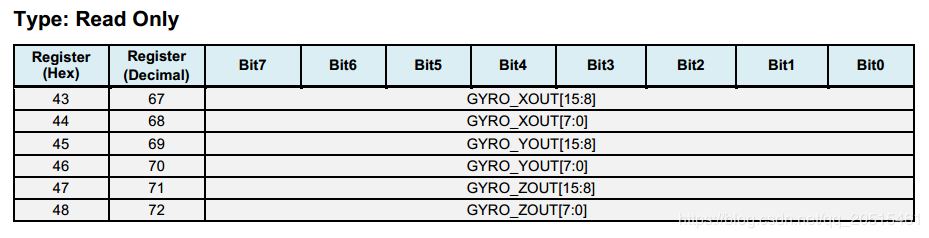
寄存器 67 ~ 72 - 陀螺仪测量值
VL53LXX 传感器¶
概述
VL53L1X 是 ST 公司提供的一款 ToF 测距和姿态检测传感器。
工作原理
VL53L0X/VL53L1X 芯片内部集成了激光发射器和 SPAD 红外接收器。芯片通过探测光子发送和接收时间差,计算光子飞行距离,最远测量距离可达两米,适合中短距离测量的应用。

VL53LXX¶
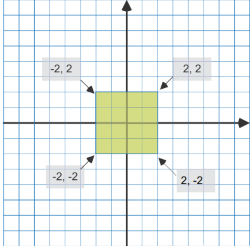
测量区域 - ROI
VL53L0X/VL53L1X 的测量值为测量区域中的最短距离,测量区域可以根据使用场景进行放大或缩小,较大的探测范围可能会引起测量值的波动。
测量区域的配置参见 VL53LXX Datasheet 中 2.4 Ranging Description 和 2.8 Sensing Array Optical Center。
ROI¶
测量距离
VL53L0X 传感器存在 3 ~ 4 cm 的盲区,有效测量范围为 3 ~ 200 cm,精度 ±3%。
VL53L1X 是 VL53L0X 的升级版本,探测距离可达 400 cm。
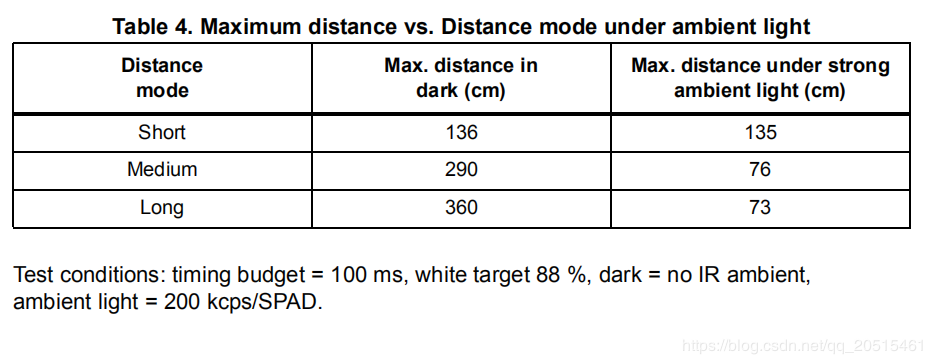
VL53LXX 测量距离与光线环境有关,黑暗环境下探测距离更远;在室外强光下,激光传感器可能会受到很大的干扰,导致测量精度降低,因此室外需要结合气压定高。
测量频率
VL53L0X 响应频率最快可达 50 Hz,测量误差 ±5%。
VL53L1X I2C 最高时钟频率可达 400 kHz,上拉电阻需要根据电压和总线电容值选择。具体信息请参考 VL53LXX Datasheet。
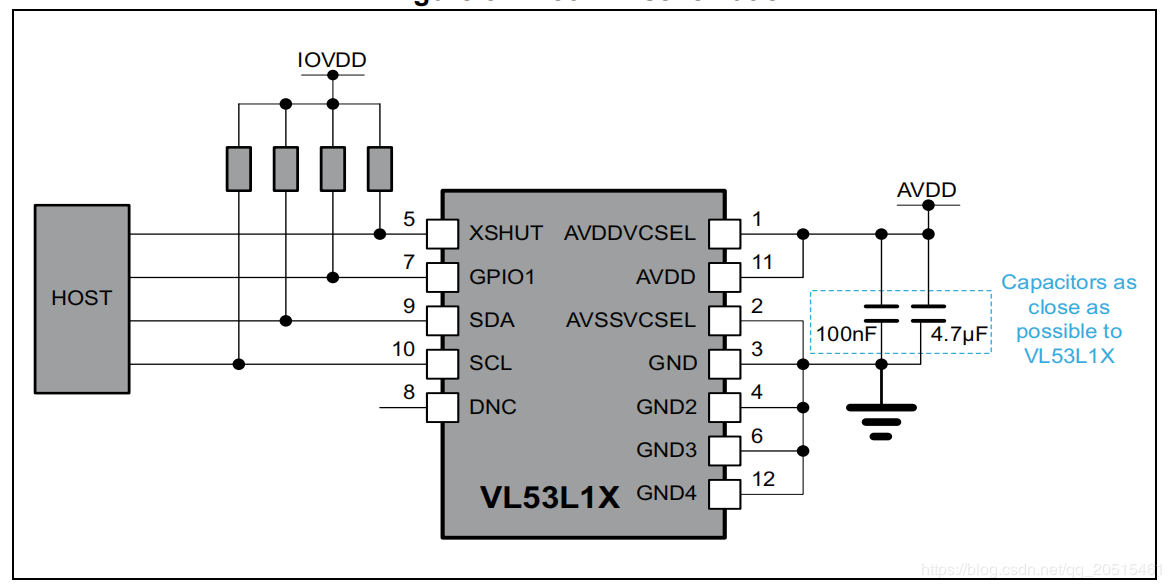
VL53L1X¶
XSHUT 为输入管脚,用于模式选择(休眠),需要上拉电阻防止漏电流。
GPIO1 为中断输出管脚,用于输出测量 dataready 中断。
工作模式
通过设置 XSHUT 管脚的电平,可以切换传感器进入 HW Standby 模式或 SW Standby 模式,实现有条件启动,降低待机功耗。如果主机放弃管理传感器模式,可将 XSHUT 管脚默认设置为上拉。
HW Standby:XSHUT 拉低,传感器电源关闭。
SW Standby:XSHUT 拉高,进入 boot 和 SW Standby 模式。
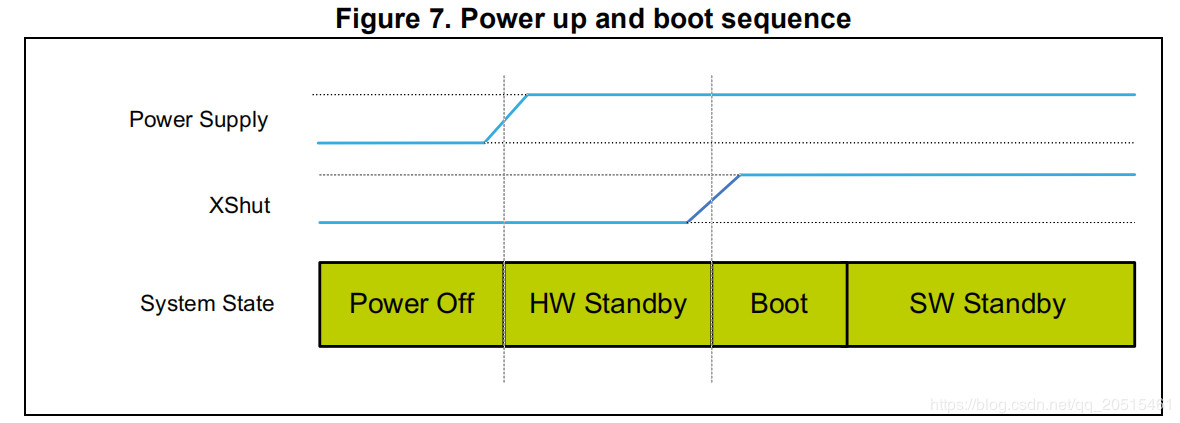
HW Standby¶
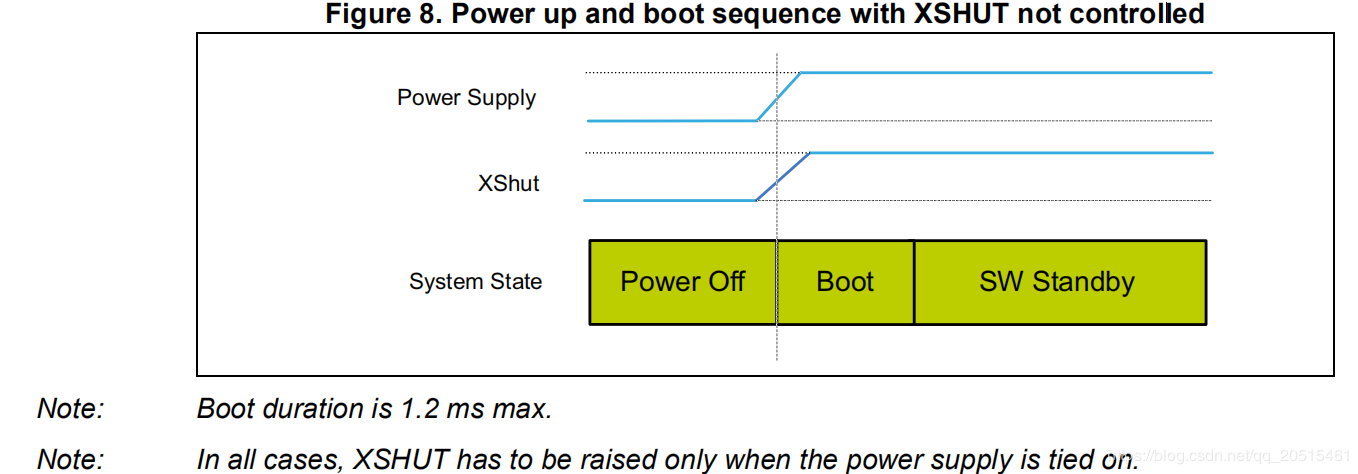
SW Standby¶
VL53LXX 初始化步骤¶
等待硬件初始化完成;
数据初始化;
静态初始化,装载数据;
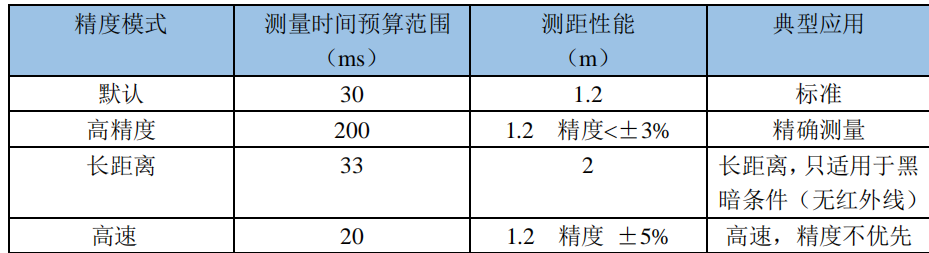
设置测量距离模式;
设置单次测量最长等待时间;
设置测量频率(时间间隔);
设置测量区域 ROI(可选);
启动测量。
/*init vl53l1 module*/
void vl53l1_init()
{
Roi0.TopLeftX = 0; //测量目标区(可选)最小 4*4,最大 16*16。
Roi0.TopLeftY = 15;
Roi0.BotRightX = 7;
Roi0.BotRightY = 0;
Roi1.TopLeftX = 8;
Roi1.TopLeftY = 15;
Roi1.BotRightX = 15;
Roi1.BotRightY = 0;
int status = VL53L1_WaitDeviceBooted(Dev); //等待硬件初始化完成。
status = VL53L1_DataInit(Dev); //数据初始化,上电后立刻执行。
status = VL53L1_StaticInit(Dev); //静态初始化,装载参数。
status = VL53L1_SetDistanceMode(Dev, VL53L1_DISTANCEMODE_LONG);//设置测量模式。
status = VL53L1_SetMeasurementTimingBudgetMicroSeconds(Dev, 50000); //根据测量模式确定最长等待时间。
status = VL53L1_SetInterMeasurementPeriodMilliSeconds(Dev, 100); //设置测量间隔。
status = VL53L1_SetUserROI(Dev, &Roi0); //设置测量区域 ROI
status = VL53L1_StartMeasurement(Dev); //启动测量
if(status) {
printf("VL53L1_StartMeasurement failed \n");
while(1);
}
}
注意,上述初始化步骤除 VL53L1_SetUserROI 外,其余步骤不可缺少。
VL53LXX 测距步骤¶
轮询测量模式
轮询测量流程图:
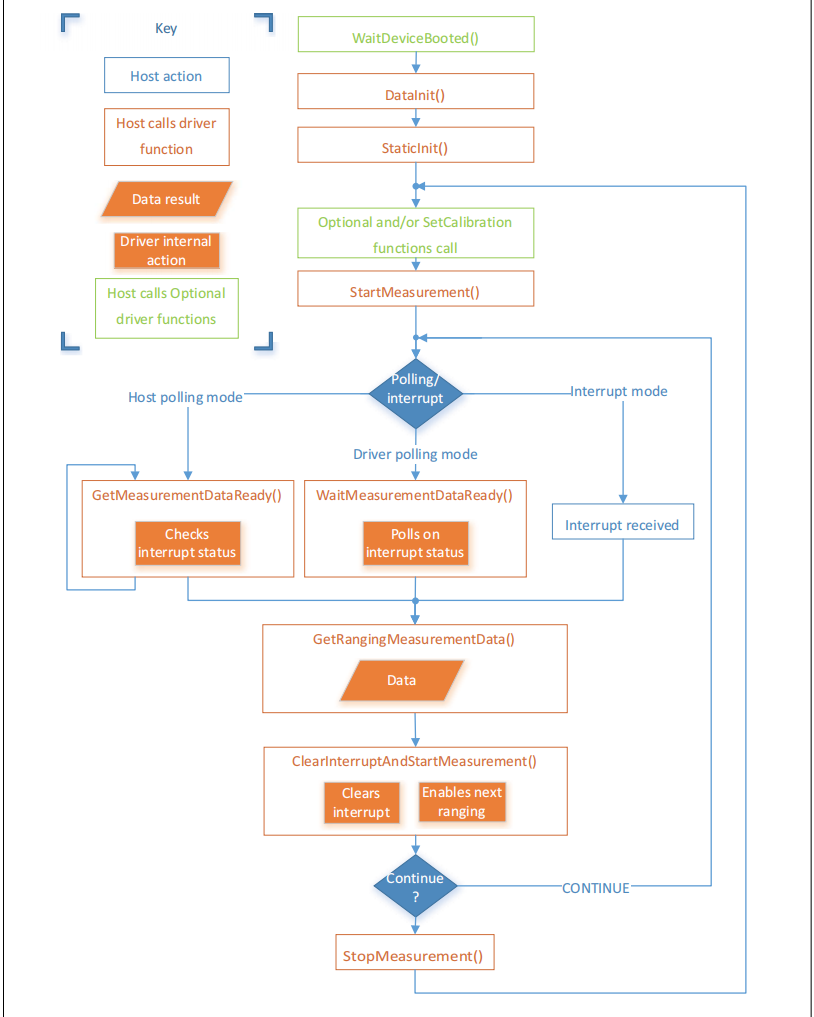
VL53LXX 测量流程¶
注意,完成一次测量和读取后,需要使用
VL53L1_ClearInterruptAndStartMeasurement清除中断标志并重新开始。轮询测量有两种方法,如上图所示:一种是阻塞方式 (Drivers polling mode);一种是非阻塞方式 (Host polling mode)。以下代码为阻塞测量方式:
/* Autonomous ranging loop*/
static void
AutonomousLowPowerRangingTest(void)
{
printf("Autonomous Ranging Test\n");
static VL53L1_RangingMeasurementData_t RangingData;
VL53L1_UserRoi_t Roi1;
int roi = 0;
float left = 0, right = 0;
if (0/*isInterrupt*/) {
} else {
do // polling mode
{
int status = VL53L1_WaitMeasurementDataReady(Dev); //等待测量结果
if(!status) {
status = VL53L1_GetRangingMeasurementData(Dev, &RangingData); //获取单次测量数据
if(status==0) {
if (roi & 1) {
left = RangingData.RangeMilliMeter;
printf("L %3.1f R %3.1f\n", right/10.0, left/10.0);
} else
right = RangingData.RangeMilliMeter;
}
if (++roi & 1) {
status = VL53L1_SetUserROI(Dev, &Roi1);
} else {
status = VL53L1_SetUserROI(Dev, &Roi0);
}
status = VL53L1_ClearInterruptAndStartMeasurement(Dev); //释放中断
}
}
while (1);
}
// return status;
}
中断测量模式
中断测量模式需要使用中断管脚 GPIO1,在数据 ready 时,GPIO1 管脚电平将被拉低,通知主机读取数据。
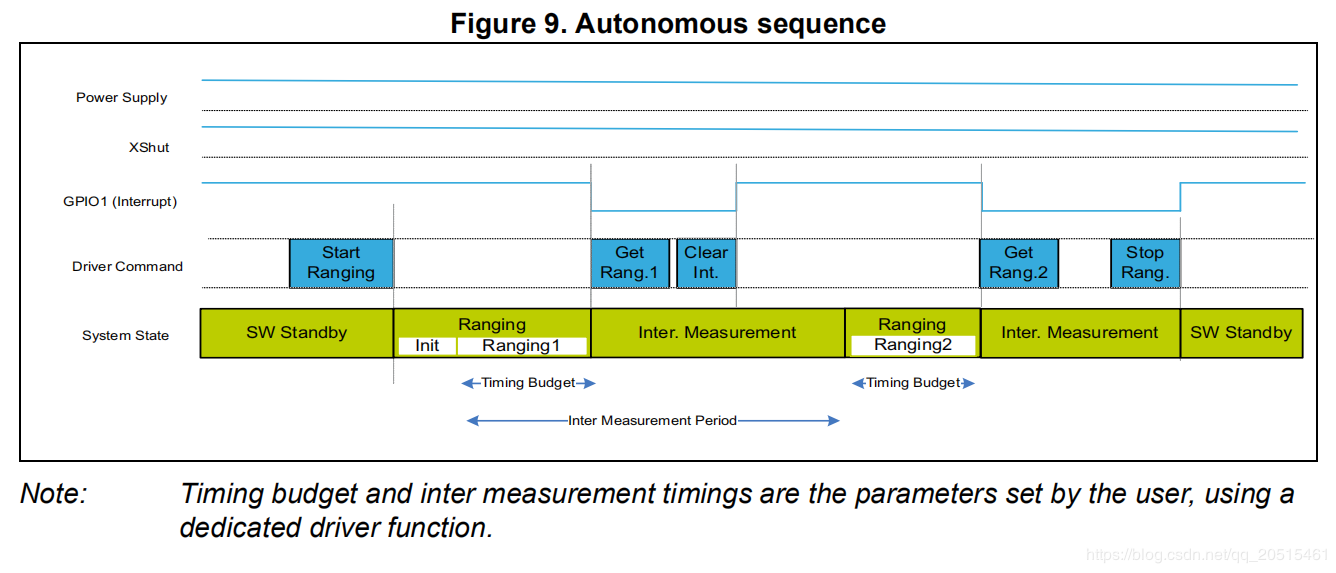
VL53LXX 自主测量流程¶
VL53LXX 传感器校准¶
如果传感器接收器上方安装了光罩,或传感器安装在透明盖板背后,由于透光率的变化,需要对传感器进行校准。您可以根据校准流程调用 API 编写校准程序,也可以使用官方提供的 GUI 上位机直接测量出校准值。
使用官方 API 编写校准程序
校准流程:调用顺序要完全一致。
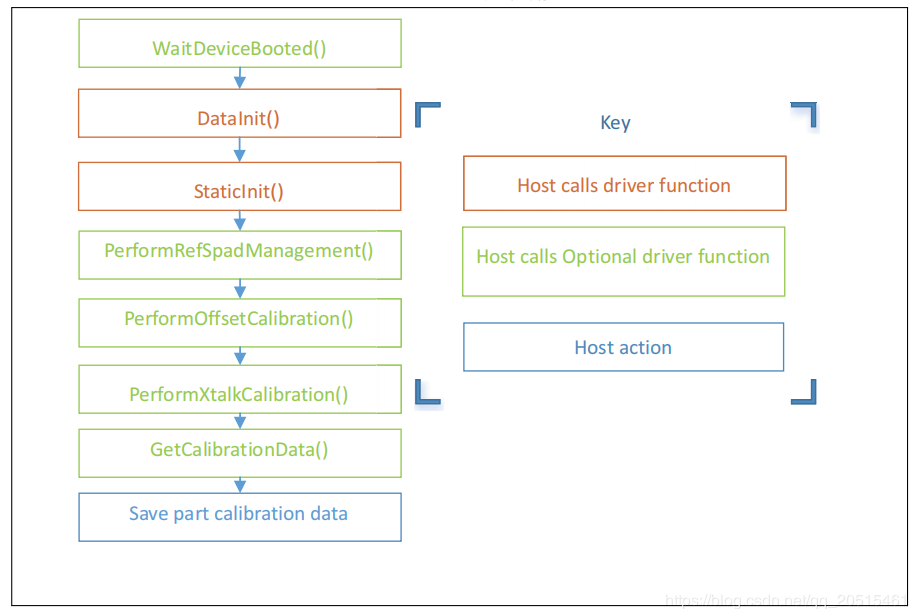
VL53LXX 校准流程¶
/*VL53L1 模块校准*/
static VL53L1_CalibrationData_t vl53l1_calibration(VL53L1_Dev_t *dev)
{
int status;
int32_t targetDistanceMilliMeter = 703;
VL53L1_CalibrationData_t calibrationData;
status = VL53L1_WaitDeviceBooted(dev);
status = VL53L1_DataInit(dev); //设备初始化
status = VL53L1_StaticInit(dev); // 为给定用例,加载设备设置。
status = VL53L1_SetPresetMode(dev,VL53L1_PRESETMODE_AUTONOMOUS);
status = VL53L1_PerformRefSpadManagement(dev);
status = VL53L1_PerformOffsetCalibration(dev,targetDistanceMilliMeter);
status = VL53L1_PerformSingleTargetXTalkCalibration(dev,targetDistanceMilliMeter);
status = VL53L1_GetCalibrationData(dev,&calibrationData);
if (status)
{
ESP_LOGE(TAG, "vl53l1_calibration failed \n");
calibrationData.struct_version = 0;
return calibrationData;
}else
{
ESP_LOGI(TAG, "vl53l1_calibration done ! version = %u \n",calibrationData.struct_version);
return calibrationData;
}
}
使用官方 GUI 上位机校准传感器
官方提供了用于配置和校准传感器的 GUI 上位机,配合 ST 官方 STM32F401RE nucleo 开发板连接传感器,使用软件校准得到基准值后,初始化时填入即可。
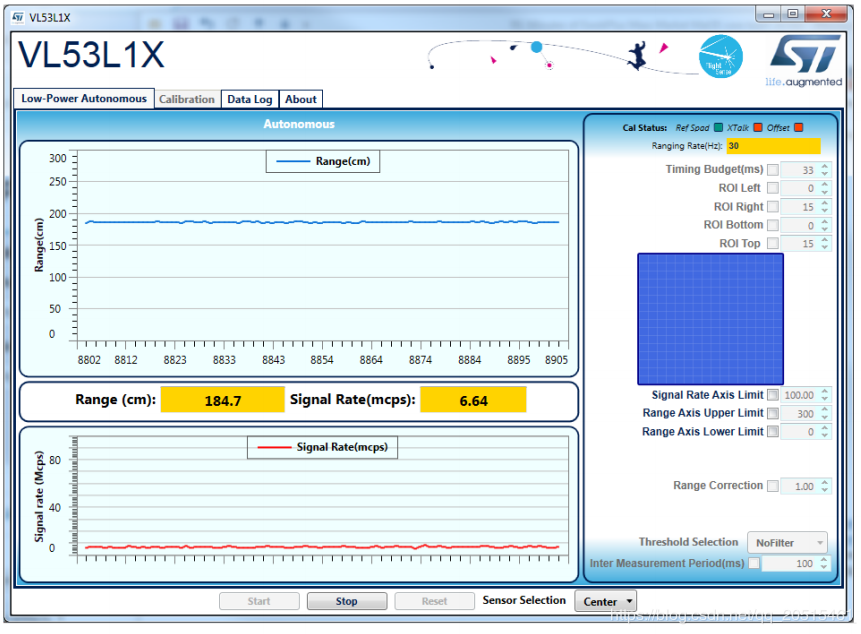
STSW-IMG008¶
VL53L1X 例程¶
例程说明
实现功能:通过 VL53L1X 检测到高度变化(持续 1 秒),红灯亮起。高度恢复正常值(持续 1 秒),绿灯亮起。
可配置参数:通过
make menuconfig设置 I2C 号码、端口号、LED 端口号。例程解析见代码注释和用户手册。
注意事项
该例程只适用于 VL53L1X,VL53L0X 为老版本硬件,不适用本例程。
官方标称 400 cm 测量距离,为黑暗环境下测得。室内正常灯光环境,可以保证 10 ~ 260 cm 范围的有效测量。
初始化函数
vl53l1\_init (VL53L1\_Dev\_t \*)中部分参数,需要根据实际使用环境确定,还有优化的空间。传感器安装位置应确保在检测位置正上方。
模块上电时自动矫正基准高度,如果基准高度有变化,需要重新上电重置参数。
例程仓库
点击 esp32-vl53l1x-test 查看例程,或使用 git 工具下载例程:
git clone https://github.com/qljz1993/esp32-vl53l1x-test.git
SPI 设备驱动 (spi_devices)¶
PMW3901 传感器¶
PMW3901 是 PixArt 公司最新的高精度低功耗光学追踪模组,可直接获取 X-Y 方向运动速度信息,实现对地高度 8 cm 以上进行有效测量。PWM3901 工作电流小于 9 mA,工作电压为 VDD (1.8 ~ 2.1 V),VDDIO (1.8 ~ 3.6 V),使用 4 线 SPI 接口通信。
主要参数
参数 |
参数值 |
|---|---|
供电电压 (V) |
VDD:1.8 ~ 2.1 V;VDDIO:1.8 ~ 3.6 V |
工作范围 (mm) |
80 ~ +∞ |
接口 |
4 线 SPI @ 2 MHz |
封装 |
28 管脚 COB 封装,尺寸:6 x 6 x 2.28 mm |
封装和管脚图
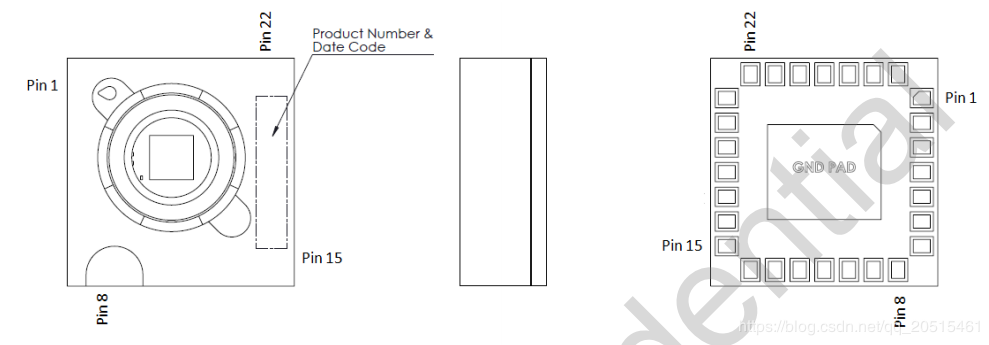
PMW3901 封装¶
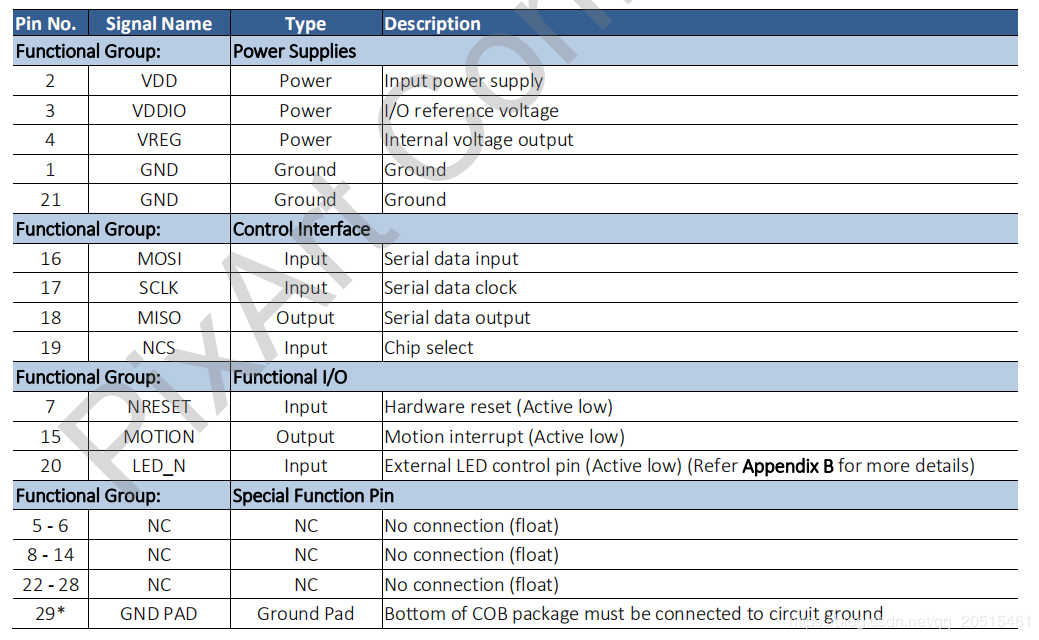
PMW3901 管脚映射¶
传感器工作电压较低,与 3.3 V 的 ESP32 通信,需要 VDD 和 VDDIO 提供不同的电压。
上电启动流程¶
上电流程
PMW3901MB 虽然可执行内部上电自复位,但仍建议每次上电时,对 Power_Up_Reset 寄存器执行写操作。具体顺序如下:
首先对 VDDIO 供电,然后对 VDD 供电,中间延迟不应超过 100 ms。注意确保供电稳定。
等待至少 40 ms。
先拉高,然后再拉低 NCS,以复位 SPI 口。
写 0x5A 到 Power_Up_Reset 寄存器,或切换至 NRESET 管脚。
等待至少 1 ms。
无论运动管脚状态如何,一次读取寄存器 0x02、0x03、0x04、0x05 和 0x06。
请参考 PWM3901MB Datasheet 章节 8.2 性能优化寄存器来配置所需的寄存器,以实现芯片的最佳性能。
掉电流程
通过写 Shutdown 寄存器,可将 PMW3901MB 设置为 Shutdown 模式。Shutdown 模式下 PMW3901MB 只对上电启动指令(写 0x5A 到寄存器 0x3A)进行响应,不响应其它访问操作。同一 SPI 总线下的其它设备不受 PMW3901MB Shutdown 模式的影响,在 NCS 管脚不冲突的情况下可以正常访问。
从 Shutdown 模式复位:
拉高,然后再拉低 NCS,以复位 SPI 口;
写 0x5A 到 Power_Up_Reset 寄存器,或切换至 NRESET 管脚;
等待至少 1 ms;
无论运动管脚状态如何,一次性读取寄存器 0x02、0x03、0x04、0x05 和 0x06;
请参考 PWM3901MB Datasheet 章节 8.2 性能优化寄存器来配置所需的寄存器,以实现芯片的最佳性能。
更多信息见 PixArt 其它产品助力 IoT。
部分代码解读¶
关键结构体
typedef struct opFlow_s
{
float pixSum[2]; /*累积像素*/
float pixComp[2]; /*像素补偿*/
float pixValid[2]; /*有效像素*/
float pixValidLast[2]; /*上一次有效像素*/
float deltaPos[2]; /*2 帧之间的位移 单位:cm*/
float deltaVel[2]; /*速度 单位 cm/s*/
float posSum[2]; /*累积位移 单位 cm*/
float velLpf[2]; /*速度低通 单位 cm/s*/
bool isOpFlowOk; /*光流状态*/
bool isDataValid; /*数据有效*/
} opFlow_t;
累积像素:飞行器起飞后的累积像素;
像素补偿:补偿由于飞行器倾斜导致的像素误差;
有效像素:指经过补偿的实际像素;
2 帧之间的位移:即由像素转换出来的实际位移,单位 cm;
速度:表示瞬时速度,由位移变化量微分得到,单位 cm/s;
累积位移:实际位移,单位 cm;
速度低通:对速度进行低通,增加数据平滑性;
光流状态:检查光流是否正常工作;
数据有效:在一定高度范围内,数据有效。
typedef struct motionBurst_s {
union {
uint8_t motion;
struct {
uint8_t frameFrom0 : 1;
uint8_t runMode : 2;
uint8_t reserved1 : 1;
uint8_t rawFrom0 : 1;
uint8_t reserved2 : 2;
uint8_t motionOccured : 1;
};
};
uint8_t observation;
int16_t deltaX;
int16_t deltaY;
uint8_t squal;
uint8_t rawDataSum;
uint8_t maxRawData;
uint8_t minRawData;
uint16_t shutter;
} __attribute__((packed)) motionBurst_t;
motion:运动信息,可以根据不同的位去判断运动信息,包括帧判别、运行模式和运动信息检测等;
observation:用于检测 IC 是否出现 EFT/B 或 ESD 问题。传感器正常工作时,读取出来的值为 0xBF;
deltaX 和 deltaY:光流检测到图像 X 和 Y 方向的运动信息;
squal:指运动信息质量,即运动信息的可信度;
rawDataSum:原数据求和,可用于对一帧数据求平均值;
maxRawData 和 minRawData:最大和最小原始数据;
shutter:是一个实时自动调整的值,确保平均运动数据保持在正常可操作范围以内。shutter 可搭配 squal,用来判断运动信息是否可用。
编程注意事项¶
如果连续 1 s 内光流数据都为 0,说明出现故障,需要做挂起光流任务等处理;
注意,传感器镜头必须朝下安装。由于地方位置固定,根据相对运动,传感器采集的位移数据与飞机实际运动方向相反;
注意,只有在定高模式测试稳定时,才能进入定点模式。精确的高度信息,用于确定图像像素和实际距离的对应关系;
手动测试倾角补偿,实现通过补偿使飞行器有一定的倾角时,传感器输出基本不变化;
有了倾角补偿和运动累积像素即可以得到实际累积像素。通过相关计算可以得到:
2 帧之间变化像素 = 实际积累像素 - 上次实际像素;
2 帧之间的位移变化 = 2 帧之间变化像素 x 系数。对系数的限制:高度小于 5 cm,光流即无法工作,所以系数设置为 0;
对上述位移积分,得到四轴到起飞点的位移;对上述位移微分,得到瞬时速度。注意对速度进行低通增加数据的平滑性,对速度进行限幅处理,增加数据安全性。
通过光流就得到了四轴的位置信息和速度信息,然后:
上述位置信息和速度信息融合加速计 (state_estimator.c),即可得到估测位置和速度;
估测位置和速度参与 PID 运算,即可用于水平方向位置控制。请参考 position_pid.c,查看位置环和速度环 PID 的处理过程。
通过上述过程即可实现水平定点控制。