搭建开发环境¶
ESP-IDF 环境搭建¶
请参照 ESP-IDF 编程指南,按照步骤设置 ESP-IDF。
注意事项:
推荐安装 ESP-IDF release/v4.4 分支;
请完成 ESP-IDF 所有安装步骤;
建议首先编译一个 ESP-IDF 示例程序,用以检查安装的完整性。
获取项目源代码¶
测试版本代码,目前放在 GitHub 仓库,可使用 git 工具获取:
git clone https://github.com/espressif/esp-drone.git
项目软件主要由飞控内核、硬件驱动和依赖库组成:
飞控内核来自 Crazyflie 开源工程,主要包括硬件抽象层和飞控程序。
硬件驱动按照硬件接口进行了文件结构划分,包括 I2C 设备和 SPI 设备等。
依赖库包括 ESP-IDF 提供的默认组件,以及来自第三方的 DSP 等。
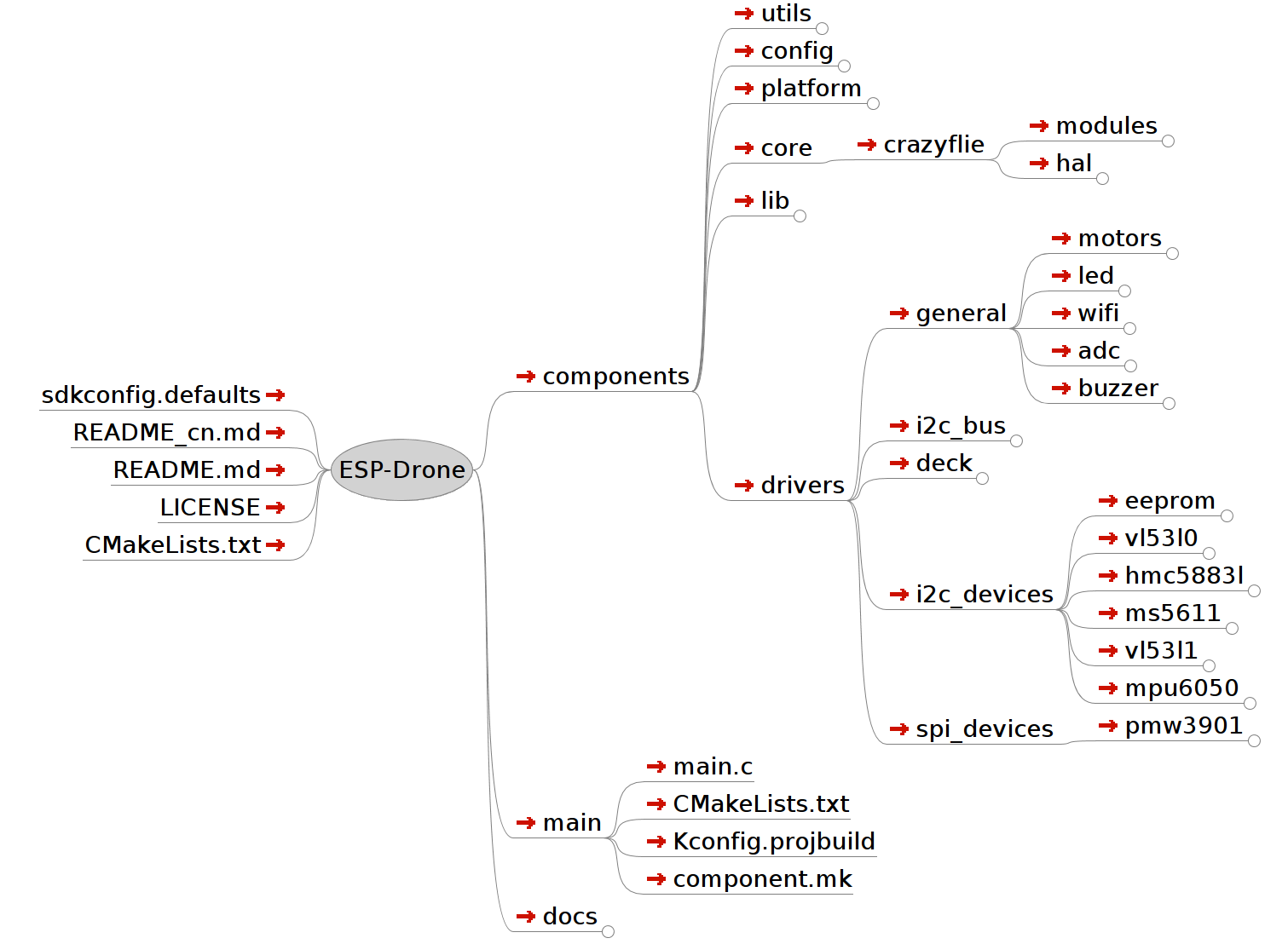
代码文件结构如下所示:
.
├── components | 项目组件目录
│ ├── config | 系统 task 配置
│ │ └── include
│ ├── core | 系统内核目录
│ │ └── crazyflie | crazyflie 内核
│ │ ├── hal | 硬件抽象代码
│ │ └── modules | 飞行控制代码
│ ├── drivers | 硬件驱动目录
│ │ ├── deck | 硬件扩展接口驱动
│ │ ├── general | 一般设备目录
│ │ │ ├── adc | ADC 驱动,用于电压监测
│ │ │ ├── buzzer | 蜂鸣器驱动,用于状态反馈
│ │ │ ├── led | LED 驱动,用于状态反馈
│ │ │ ├── motors | 电机驱动,用于推力输出
│ │ │ └── wifi | Wi-Fi 驱动,用于通信
│ │ ├── i2c_bus | I2C 驱动
│ │ ├── i2c_devices | I2C 设备目录
│ │ │ ├── eeprom | eeprom 驱动,用于参数存储
│ │ │ ├── hmc5883l | hmc5883l 磁罗盘传感器
│ │ │ ├── mpu6050 | mpu6050 陀螺仪加速度计传感器
│ │ │ ├── ms5611 | ms5611 气压传感器
│ │ │ ├── vl53l0 | Vl53l0 激光传感器(最大测距 2 m)
│ │ │ └── vl53l1 | Vl53l1 激光传感器(最大测距 4 m)
│ │ └── spi_devices | SPI 设备目录
│ │ └── pmw3901 | pmw3901 光流传感器
│ ├── lib | 外部库目录
│ │ └── dsp_lib | dsp 库
│ ├── platform | 用于支持多平台
│ └── utils | 工具函数目录
├── CMakeLists.txt | 工具函数
├── LICENSE | 开源协议
├── main | 入口函数
├── README.md | 项目说明
└── sdkconfig.defaults | 默认参数
详情可查阅:espdrone_file_structure
源代码风格¶
两种方式检索同一区域(union)
实现两种检索方式检索同一片内存区域,可以使用:
typedef union {
struct {
float x;
float y;
float z;
};
float axis[3];
} Axis3f;
使用枚举类型计数
以下枚举类型成员 SensorImplementation_COUNT,始终可以代表枚举类型中成员的个数。巧妙利用了枚举类型第一个成员默认为 0 的特点。
typedef enum {
#ifdef SENSOR_INCLUDED_BMI088_BMP388
SensorImplementation_bmi088_bmp388,
#endif
#ifdef SENSOR_INCLUDED_BMI088_SPI_BMP388
SensorImplementation_bmi088_spi_bmp388,
#endif
#ifdef SENSOR_INCLUDED_MPU9250_LPS25H
SensorImplementation_mpu9250_lps25h,
#endif
#ifdef SENSOR_INCLUDED_MPU6050_HMC5883L_MS5611
SensorImplementation_mpu6050_HMC5883L_MS5611,
#endif
#ifdef SENSOR_INCLUDED_BOSCH
SensorImplementation_bosch,
#endif
SensorImplementation_COUNT,
} SensorImplementation_t;
紧凑的数据类型
struct cppmEmuPacket_s {
struct {
uint8_t numAuxChannels : 4; // Set to 0 through MAX_AUX_RC_CHANNELS
uint8_t reserved : 4;
} hdr;
uint16_t channelRoll;
uint16_t channelPitch;
uint16_t channelYaw;
uint16_t channelThrust;
uint16_t channelAux[MAX_AUX_RC_CHANNELS];
} __attribute__((packed));
__attribute__((packed)) 的作用是:使编译器取消结构在编译过程中的优化对齐,而按照实际占用字节数进行对齐。这是 GCC 特有的语法,与操作系统无关,与编译器有关。GCC 和 VC(在 Windows 下)的编译器为非紧凑模式,TC 的编译器为紧凑模式。例如:
在 TC 下:struct my{ char ch; int a;} sizeof(int)=2;sizeof(my)=3;(紧凑模式)
在 GCC 下:struct my{ char ch; int a;} sizeof(int)=4;sizeof(my)=8;(非紧凑模式)
在 GCC 下:struct my{ char ch; int a;}__attrubte__ ((packed)) sizeof(int)=4;sizeof(my)=5