飞控系统¶
系统启动流程¶
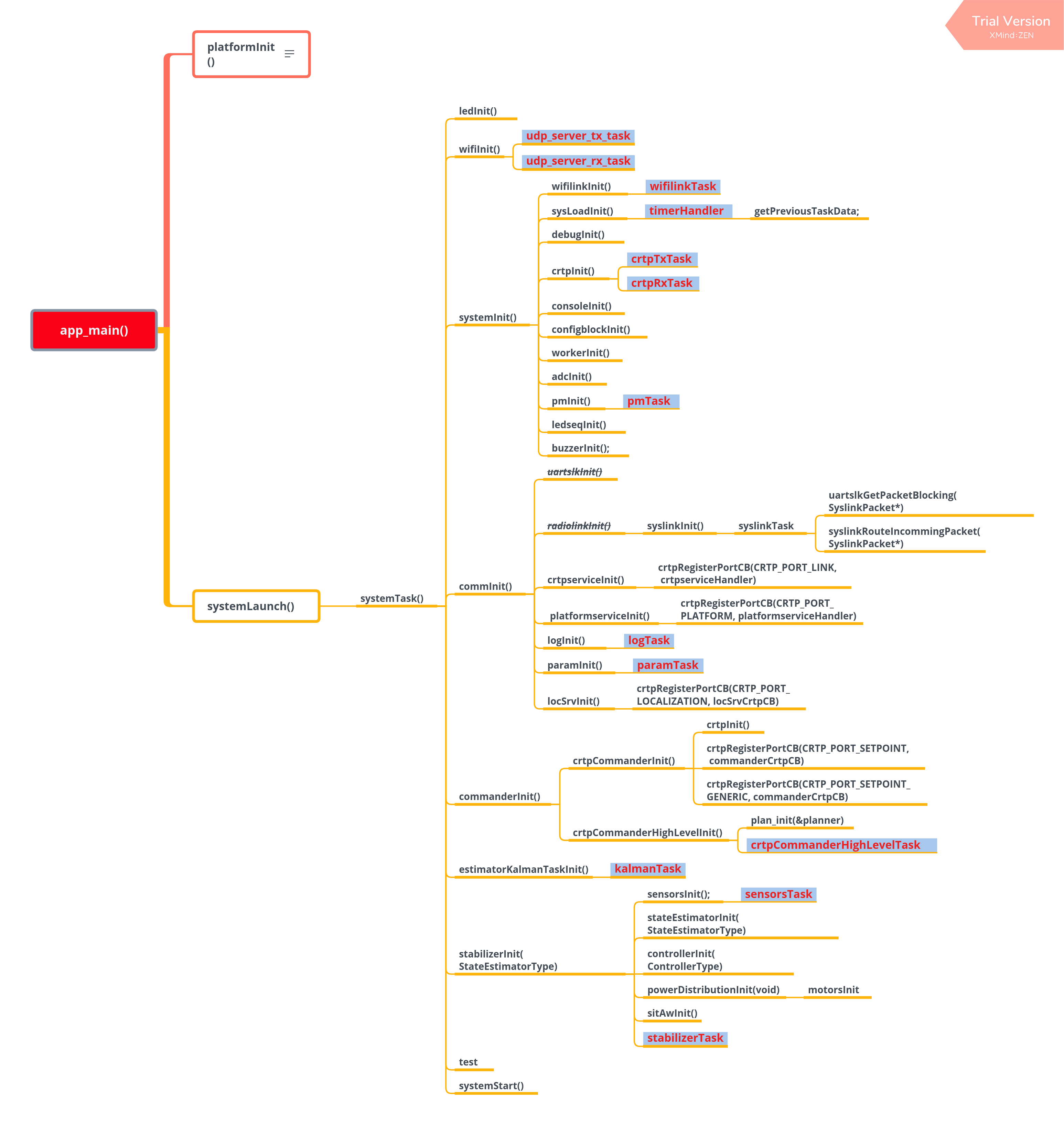
源文件见:start_from_app_main。
系统任务管理¶
系统任务简介¶
系统正常运行时,将启动以下 TASK。
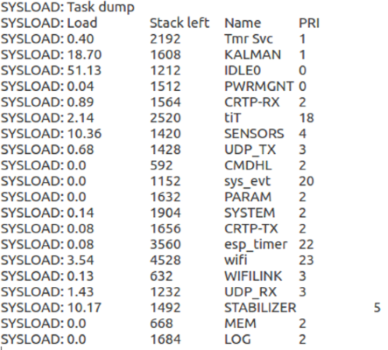
其中,
Load:CPU 占用率
Stack Left:剩余堆栈空间
Name:TASK 名称
PRI:TASK 优先级
TASK 具体描述如下:
PWRMGNT:系统电压监测
CMDHL:应用层-处理根据 CRTP 协议构成的高级命令
CRTP-RX:协议层-CRTP 飞行协议解码
CRTP-TX:协议层-CRTP 飞行协议解码
UDP-RX:传输层-UDP 包接收
UDP-TX:传输层-UDP 包发送
WIFILINK:对接 CRTP 协议层和 UDP 传输层
SENSORS:传感器数据读取和预处理
KALMAN:使用传感器数据进行飞机状态估计,包括飞机角度、角速度、空间位置的估计。该 TASK 在 ESP 芯片上 CPU 资源消耗较大,应注意优先级的分配。
PARAM:使用 CRTP 协议远程修改变量
LOG:使用 CRTP 协议实时监控变量
MEM:使用 CRTP 协议远程修改存储器
STABILIZER:自稳定线程,控制飞控程序运行流程
SYSTEM:控制系统初始化和自检流程
任务堆栈空间配置¶
用户可以在 components/config/include/config.h
中直接修改空间大小,也可以在 menucfg 中修改 BASE_STACK_SIZE
大小。使用 ESP32 时可将 BASE_STACK_SIZE 调整为
2048,减小踩内存的概率;使用 ESP32-S2 时,建议将该值调整为
1024。
//任务堆栈空间大小
#define SYSTEM_TASK_STACKSIZE (4* configBASE_STACK_SIZE)
#define ADC_TASK_STACKSIZE configBASE_STACK_SIZE
#define PM_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define CRTP_TX_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define CRTP_RX_TASK_STACKSIZE (2* configBASE_STACK_SIZE)
#define CRTP_RXTX_TASK_STACKSIZE configBASE_STACK_SIZE
#define LOG_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define MEM_TASK_STACKSIZE (1 * configBASE_STACK_SIZE)
#define PARAM_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define SENSORS_TASK_STACKSIZE (2 * configBASE_STACK_SIZE)
#define STABILIZER_TASK_STACKSIZE (2 * configBASE_STACK_SIZE)
#define NRF24LINK_TASK_STACKSIZE configBASE_STACK_SIZE
#define ESKYLINK_TASK_STACKSIZE configBASE_STACK_SIZE
#define SYSLINK_TASK_STACKSIZE configBASE_STACK_SIZE
#define USBLINK_TASK_STACKSIZE configBASE_STACK_SIZE
#define WIFILINK_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define UDP_TX_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define UDP_RX_TASK_STACKSIZE (2*configBASE_STACK_SIZE)
#define UDP_RX2_TASK_STACKSIZE (1*configBASE_STACK_SIZE)
#define PROXIMITY_TASK_STACKSIZE configBASE_STACK_SIZE
#define EXTRX_TASK_STACKSIZE configBASE_STACK_SIZE
#define UART_RX_TASK_STACKSIZE configBASE_STACK_SIZE
#define ZRANGER_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define ZRANGER2_TASK_STACKSIZE (2* configBASE_STACK_SIZE)
#define FLOW_TASK_STACKSIZE (2* configBASE_STACK_SIZE)
#define USDLOG_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define USDWRITE_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define PCA9685_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define CMD_HIGH_LEVEL_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define MULTIRANGER_TASK_STACKSIZE (1* configBASE_STACK_SIZE)
#define ACTIVEMARKER_TASK_STACKSIZE configBASE_STACK_SIZE
#define AI_DECK_TASK_STACKSIZE configBASE_STACK_SIZE
#define UART2_TASK_STACKSIZE configBASE_STACK_SIZE
任务优先级配置¶
系统 TASK 优先级可以在 components/config/include/config.h
中进行配置。由于 ESP32 具有双核优势,相比 ESP32-S2
计算资源更加富余,可将高耗时的 KALMAN_TASK 优先级调高。在使用
ESP32-S2 时,需要将高耗时的 KALMAN_TASK
优先级调低,否则难以释放足够的 CPU 资源,将触发 task watchdog。
// 任务优先级,数字越大,优先级越高。
#define STABILIZER_TASK_PRI 5
#define SENSORS_TASK_PRI 4
#define ADC_TASK_PRI 3
#define FLOW_TASK_PRI 3
#define MULTIRANGER_TASK_PRI 3
#define SYSTEM_TASK_PRI 2
#define CRTP_TX_TASK_PRI 2
#define CRTP_RX_TASK_PRI 2
#define EXTRX_TASK_PRI 2
#define ZRANGER_TASK_PRI 2
#define ZRANGER2_TASK_PRI 2
#define PROXIMITY_TASK_PRI 0
#define PM_TASK_PRI 0
#define USDLOG_TASK_PRI 1
#define USDWRITE_TASK_PRI 0
#define PCA9685_TASK_PRI 2
#define CMD_HIGH_LEVEL_TASK_PRI 2
#define BQ_OSD_TASK_PRI 1
#define GTGPS_DECK_TASK_PRI 1
#define LIGHTHOUSE_TASK_PRI 3
#define LPS_DECK_TASK_PRI 5
#define OA_DECK_TASK_PRI 3
#define UART1_TEST_TASK_PRI 1
#define UART2_TEST_TASK_PRI 1
//if task watchdog triggered, KALMAN_TASK_PRI should set lower or set lower flow frequency
#ifdef CONFIG_IDF_TARGET_ESP32
#define KALMAN_TASK_PRI 2
#define LOG_TASK_PRI 1
#define MEM_TASK_PRI 1
#define PARAM_TASK_PRI 1
#else
#define KALMAN_TASK_PRI 1
#define LOG_TASK_PRI 2
#define MEM_TASK_PRI 2
#define PARAM_TASK_PRI 2
#endif
#define SYSLINK_TASK_PRI 3
#define USBLINK_TASK_PRI 3
#define ACTIVE_MARKER_TASK_PRI 3
#define AI_DECK_TASK_PRI 3
#define UART2_TASK_PRI 3
#define WIFILINK_TASK_PRI 3
#define UDP_TX_TASK_PRI 3
#define UDP_RX_TASK_PRI 3
#define UDP_RX2_TASK_PRI 3
关键任务介绍¶
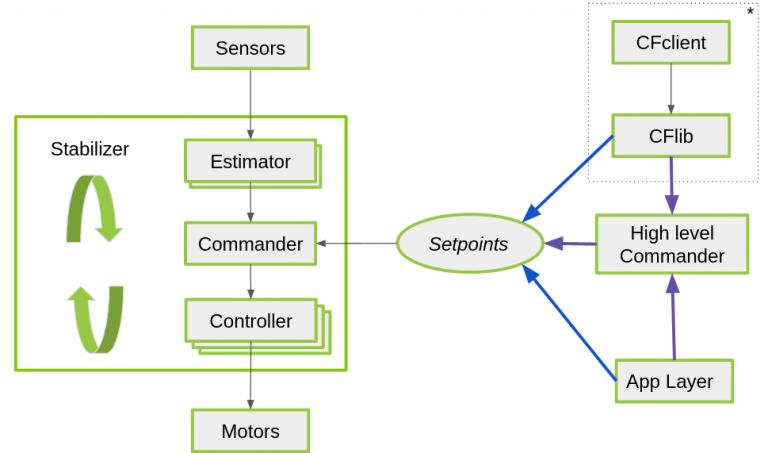
除了系统默认开启的 TASK(如 Wi-Fi TASK),优先级最高的 TASK 是
STABILIZER_TASK,凸显了这个任务的重要性。STABILIZER_TASK
控制了从传感器数据读取,到姿态计算,到目标接收,到最终输出电机功率的整个过程,驱动各个阶段的算法运行。
stabilizerTask 流程¶
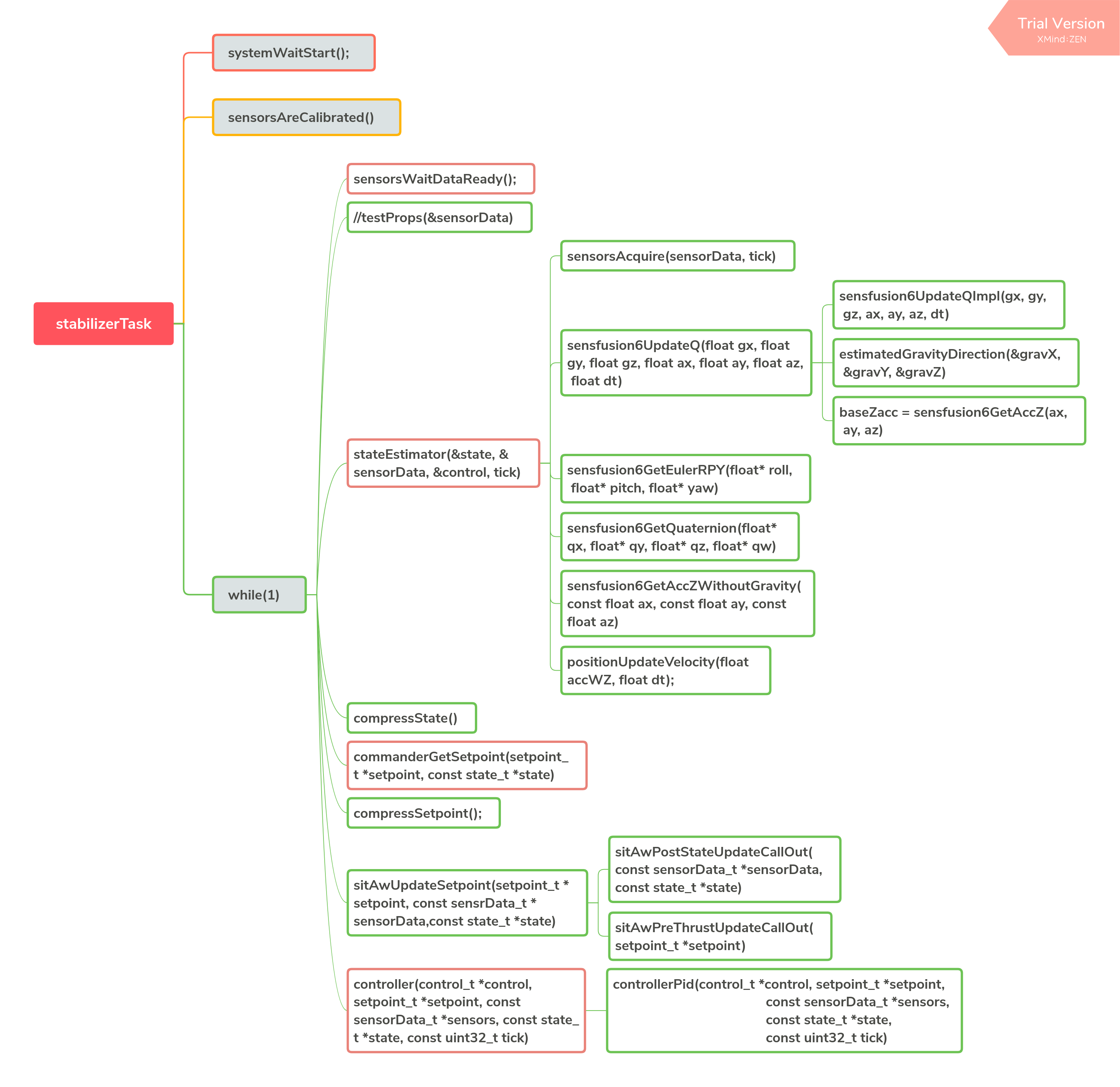
stabilizerTask¶
传感器驱动¶
传感器驱动代码,可以在 components\drivers 中查阅。drivers
使用了与
esp-iot-solution
类似的文件结构,将驱动程序按照所属总线进行分类,包括
i2c_devices、spi_devices、general
等。具体可参考:驱动程序。
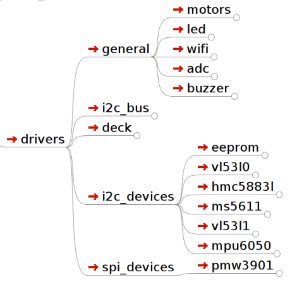
驱动文件结构¶
传感器硬件抽象¶
components\core\crazyflie\hal\src\sensors.c
文件对传感器进行了硬件抽象,开发者可以自由组合传感器,通过实现硬件抽象层定义的传感器接口,与上层应用进行对接。
typedef struct {
SensorImplementation_t implements;
void (*init)(void);
bool (*test)(void);
bool (*areCalibrated)(void);
bool (*manufacturingTest)(void);
void (*acquire)(sensorData_t *sensors, const uint32_t tick);
void (*waitDataReady)(void);
bool (*readGyro)(Axis3f *gyro);
bool (*readAcc)(Axis3f *acc);
bool (*readMag)(Axis3f *mag);
bool (*readBaro)(baro_t *baro);
void (*setAccMode)(accModes accMode);
void (*dataAvailableCallback)(void);
} sensorsImplementation_t;
ESP-Drone 实现的传感器抽象接口在
components/core/crazyflie/hal/src/sensors_mpu6050_hm5883L_ms5611.c
中,通过以下赋值过程与上层应用对接:
#ifdef SENSOR_INCLUDED_MPU6050_HMC5883L_MS5611
{
.implements = SensorImplementation_mpu6050_HMC5883L_MS5611,
.init = sensorsMpu6050Hmc5883lMs5611Init,
.test = sensorsMpu6050Hmc5883lMs5611Test,
.areCalibrated = sensorsMpu6050Hmc5883lMs5611AreCalibrated,
.manufacturingTest = sensorsMpu6050Hmc5883lMs5611ManufacturingTest,
.acquire = sensorsMpu6050Hmc5883lMs5611Acquire,
.waitDataReady = sensorsMpu6050Hmc5883lMs5611WaitDataReady,
.readGyro = sensorsMpu6050Hmc5883lMs5611ReadGyro,
.readAcc = sensorsMpu6050Hmc5883lMs5611ReadAcc,
.readMag = sensorsMpu6050Hmc5883lMs5611ReadMag,
.readBaro = sensorsMpu6050Hmc5883lMs5611ReadBaro,
.setAccMode = sensorsMpu6050Hmc5883lMs5611SetAccMode,
.dataAvailableCallback = nullFunction,
}
#endif
传感器校准过程¶
陀螺仪校准过程¶
由于陀螺仪存在较大的温漂,因此每次使用前需要对陀螺仪进行校准,计算当前环境下的陀螺仪基准值。ESP-Drone 延续 Crazyflie 2.0 陀螺仪校准方案,在初次上电时,计算陀螺仪三个轴的方差与平均值。
陀螺仪具体校准过程如下:
使用一个最大长度为 1024 的环形缓冲区,存储最新的 1024 组陀螺仪测量值。
通过计算陀螺仪输出值方差,确认飞行器已经放置平稳并且陀螺仪工作正常。
确认第 2 步正常后,计算静止时 1024 组陀螺仪输出值的平均值,作为陀螺仪的校准值。
陀螺仪基准值计算源代码:
/**
* Adds a new value to the variance buffer and if it is full
* replaces the oldest one. Thus a circular buffer.
*/
static void sensorsAddBiasValue(BiasObj* bias, int16_t x, int16_t y, int16_t z)
{
bias->bufHead->x = x;
bias->bufHead->y = y;
bias->bufHead->z = z;
bias->bufHead++;
if (bias->bufHead >= &bias->buffer[SENSORS_NBR_OF_BIAS_SAMPLES])
{
bias->bufHead = bias->buffer;
bias->isBufferFilled = true;
}
}
/**
* Checks if the variances is below the predefined thresholds.
* The bias value should have been added before calling this.
* @param bias The bias object
*/
static bool sensorsFindBiasValue(BiasObj* bias)
{
static int32_t varianceSampleTime;
bool foundBias = false;
if (bias->isBufferFilled)
{
sensorsCalculateVarianceAndMean(bias, &bias->variance, &bias->mean);
if (bias->variance.x < GYRO_VARIANCE_THRESHOLD_X &&
bias->variance.y < GYRO_VARIANCE_THRESHOLD_Y &&
bias->variance.z < GYRO_VARIANCE_THRESHOLD_Z &&
(varianceSampleTime + GYRO_MIN_BIAS_TIMEOUT_MS < xTaskGetTickCount()))
{
varianceSampleTime = xTaskGetTickCount();
bias->bias.x = bias->mean.x;
bias->bias.y = bias->mean.y;
bias->bias.z = bias->mean.z;
foundBias = true;
bias->isBiasValueFound = true;
}
}
return foundBias;
}
修正陀螺仪输出值:
sensorData.gyro.x = (gyroRaw.x - gyroBias.x) * SENSORS_DEG_PER_LSB_CFG;
sensorData.gyro.y = (gyroRaw.y - gyroBias.y) * SENSORS_DEG_PER_LSB_CFG;
sensorData.gyro.z = (gyroRaw.z - gyroBias.z) * SENSORS_DEG_PER_LSB_CFG;
applyAxis3fLpf((lpf2pData *)(&gyroLpf), &sensorData.gyro); //低通滤波器,去除高频干扰
加速度计校准过程¶
重力加速度校准¶
在地球不同的纬度和海拔下,重力加速度 g 值一般不同,因此需要使用加速度计对 g 进行实际测量。可参考 Crazyflie 2.0 加速度计校准方案,g 值的校准过程如下:
陀螺仪校准完成后,立刻进行加速度计校准。
使用 Buffer 保存 200 组加速度计测量值。
通过合成重力加速度在三个轴的分量,计算重力加速度在静止状态下的值。
计算静止状态下重力加速度值:
/**
* Calculates accelerometer scale out of SENSORS_ACC_SCALE_SAMPLES samples. Should be called when
* platform is stable.
*/
static bool processAccScale(int16_t ax, int16_t ay, int16_t az)
{
static bool accBiasFound = false;
static uint32_t accScaleSumCount = 0;
if (!accBiasFound)
{
accScaleSum += sqrtf(powf(ax * SENSORS_G_PER_LSB_CFG, 2) + powf(ay * SENSORS_G_PER_LSB_CFG, 2) + powf(az * SENSORS_G_PER_LSB_CFG, 2));
accScaleSumCount++;
if (accScaleSumCount == SENSORS_ACC_SCALE_SAMPLES)
{
accScale = accScaleSum / SENSORS_ACC_SCALE_SAMPLES;
accBiasFound = true;
}
}
return accBiasFound;
}
通过实际重力加速度值,修正加速度计测量值:
accScaled.x = (accelRaw.x) * SENSORS_G_PER_LSB_CFG / accScale;
accScaled.y = (accelRaw.y) * SENSORS_G_PER_LSB_CFG / accScale;
accScaled.z = (accelRaw.z) * SENSORS_G_PER_LSB_CFG / accScale;
机身水平校准¶
理想状态下,加速度传感器在小飞机上完全水平地进行安装,进而可以使用 0 位置作为小飞机的水平面。但由于加速度计在安装时不可避免的存在一定的倾角,导致飞控系统错误估计水平位置,导致小飞机向某个方向偏飞。因此需要设置一定的校准策略来平衡这种误差。
将小飞机放置在一个水平面上,计算小飞机
cosRoll、sinRoll、cosPitch、sinPitch。理想状态下cosRoll、cosPitch为 1,sinPitch、sinRoll为 0。如果不是水平安装sinPitch、sinRoll不为 0,cosRollcosPitch不为 1。将步骤 1 的
cosRoll、sinRoll、cosPitch、sinPitch或对应的Roll、Pitch角度值保存到飞机,用于校准。
利用校准值,对加速度计测量值进行修正:
/**
* Compensate for a miss-aligned accelerometer. It uses the trim
* data gathered from the UI and written in the config-block to
* rotate the accelerometer to be aligned with gravity.
*/
static void sensorsAccAlignToGravity(Axis3f *in, Axis3f *out)
{
//TODO: need cosPitch calculate firstly
Axis3f rx;
Axis3f ry;
// Rotate around x-axis
rx.x = in->x;
rx.y = in->y * cosRoll - in->z * sinRoll;
rx.z = in->y * sinRoll + in->z * cosRoll;
// Rotate around y-axis
ry.x = rx.x * cosPitch - rx.z * sinPitch;
ry.y = rx.y;
ry.z = -rx.x * sinPitch + rx.z * cosPitch;
out->x = ry.x;
out->y = ry.y;
out->z = ry.z;
}
以上过程,可通过力的分解和勾股定理推导。
姿态计算¶
支持的姿态计算算法¶
互补滤波
卡尔曼滤波
ESP-Drone 姿态计算代码来自 Crazyflie。ESP-Drone
固件已经对互补滤波和卡尔曼滤波进行了实际测试,可以有效地计算飞行姿态,包括各个自由度的角度、角速度、和空间位置,为控制系统提供了可靠的状态输入。需要注意的是,在定点模式下,必须切换到卡尔曼滤波算法,才能保证工作正常。
Crazyflie 状态估计见 State estimation: To be or not to be!
互补滤波¶
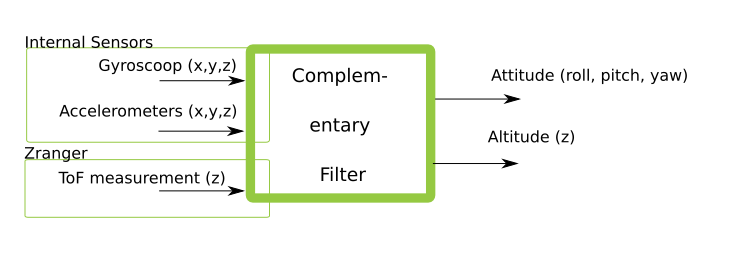
互补滤波¶
互补滤波中文说明可参考 飞控与姿态互补滤波器。
卡尔曼滤波¶
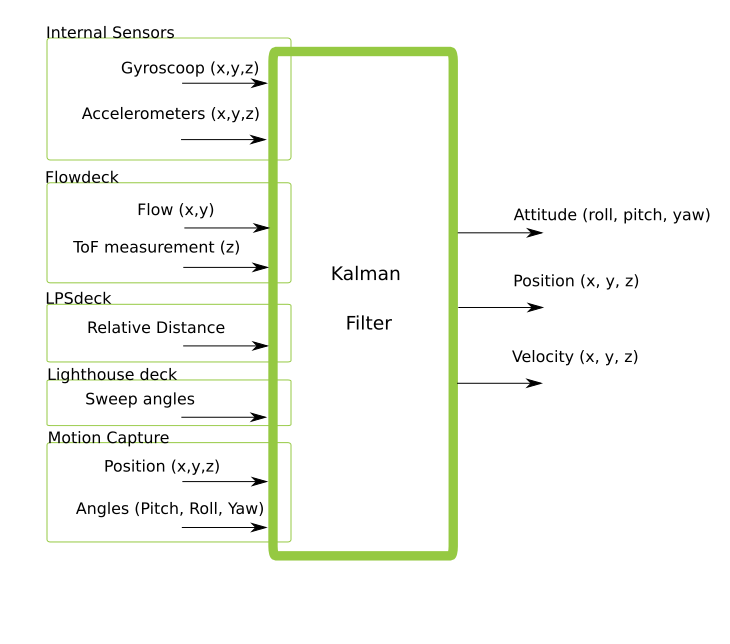
卡尔曼滤波¶
卡尔曼滤波中文说明可参考 图说卡尔曼滤波,一份通俗易懂的教程。
控制算法¶
已支持的控制器¶
ESP-Drone 控制系统代码来自 Crazyflie,也继承了该工程的所有控制算法。需要注意的是,ESP-Drone 仅对 PID 控制器进行了参数整定和测试。换用其它控制器时,请在确保安全的情况下,自行进行参数整定。
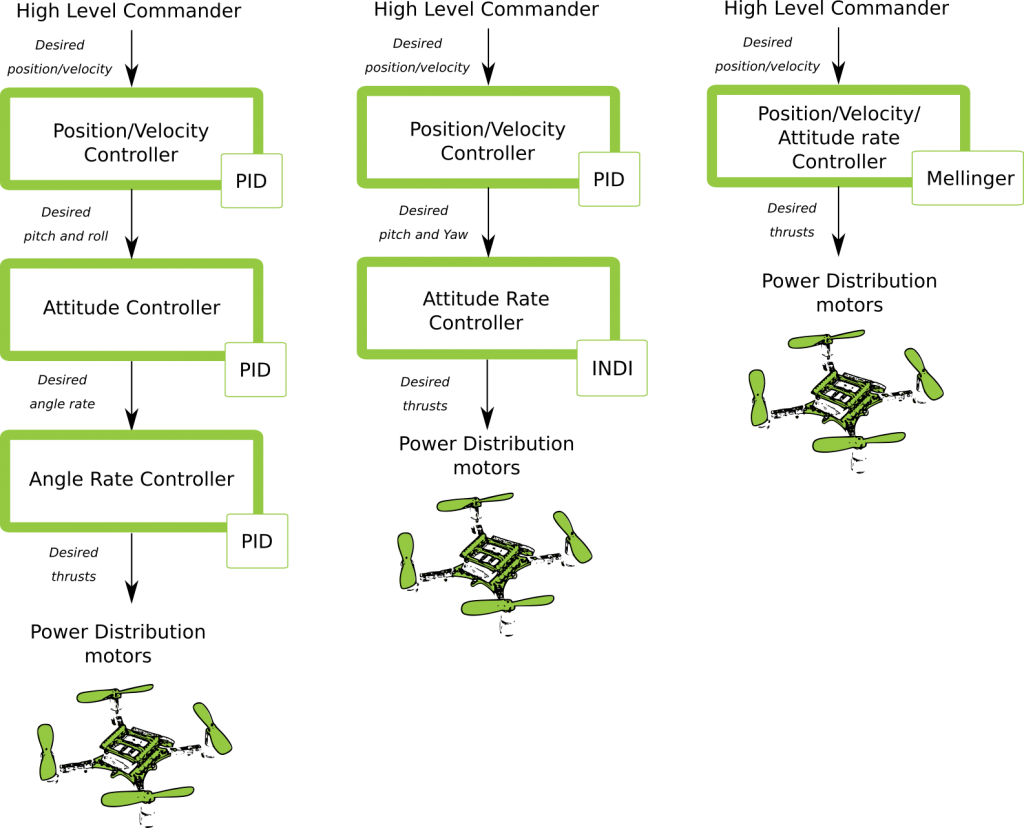
possible_controller_pathways¶
详情请参考:Out of Control。
在代码中,可通过修改 controllerInit(ControllerType controller) 的传入参数,切换控制器。
也可通过实现以下控制器接口,添加自定义的控制器:
static ControllerFcns controllerFunctions[] = {
{.init = 0, .test = 0, .update = 0, .name = "None"}, // Any
{.init = controllerPidInit, .test = controllerPidTest, .update = controllerPid, .name = "PID"},
{.init = controllerMellingerInit, .test = controllerMellingerTest, .update = controllerMellinger, .name = "Mellinger"},
{.init = controllerINDIInit, .test = controllerINDITest, .update = controllerINDI, .name = "INDI"},
};
PID 控制器¶
控制原理
PID 控制器(比例-积分-微分控制器),由比例单元 (Proportional)、积分单元 (Integral) 和微分单元 (Derivative) 组成,分别对应当前误差、过去累计误差及未来误差,最终基于误差和误差的变化率对系统进行控制。PID 控制器由于具有负反馈修正作用,一般被认为是最适用的控制器。通过调整 PID 控制器的三类参数,可以调整系统对误差的反应快慢、控制器过冲的程度及系统震荡的程度,使系统达到最优状态。
在飞行器系统中,由于存在 pitch、 roll、yaw
三个自由度,因此需要设计如下图所示的具有控制闭环的 PID 控制器。
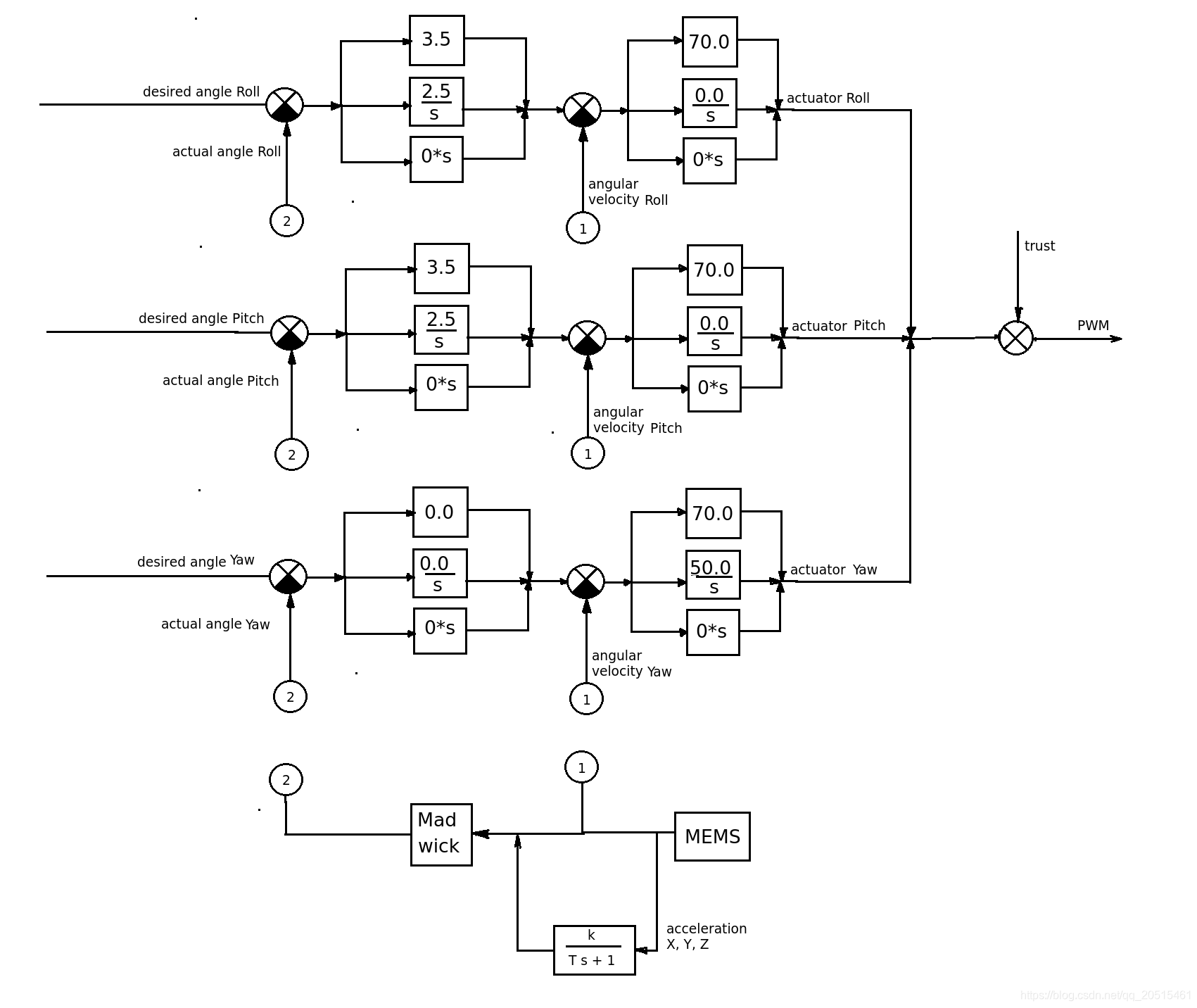
Crazyflie 控制系统¶
其中每一个自由度都包括一个串级 PID 控制器:Rate 控制和 Attitude 控制,前者以角速度作为输入量,控制角度修正的速度;后者以拟合后的角度为输入量,控制飞机到达目标角度,两个控制器以不同的频率配合工作。当然,也可以选择只使用单级的 PID 控制,默认情况下 pitch 和 roll 自由度使用 Attitude 控制,yaw 使用 Rate 控制。
可以在 crtp_commander_rpyt.c 中调整如下参数选择
static RPYType stabilizationModeRoll = ANGLE; // Current stabilization type of roll (rate or angle)
static RPYType stabilizationModePitch = ANGLE; // Current stabilization type of pitch (rate or angle)
static RPYType stabilizationModeYaw = RATE; // Current stabilization type of yaw (rate or angle)
实现代码
void controllerPid(control_t *control, setpoint_t *setpoint,
const sensorData_t *sensors,
const state_t *state,
const uint32_t tick)
{
if (RATE_DO_EXECUTE(ATTITUDE_RATE, tick)) { //该宏定义用于控制 PID 的计算频率,时间基准来自 MPU6050 触发的中断
// Rate-controled YAW is moving YAW angle setpoint
if (setpoint->mode.yaw == modeVelocity) { //rate 模式,对 yaw 做修正
attitudeDesired.yaw += setpoint->attitudeRate.yaw * ATTITUDE_UPDATE_DT;
while (attitudeDesired.yaw > 180.0f)
attitudeDesired.yaw -= 360.0f;
while (attitudeDesired.yaw < -180.0f)
attitudeDesired.yaw += 360.0f;
} else { //attitude 模式
attitudeDesired.yaw = setpoint->attitude.yaw;
}
}
if (RATE_DO_EXECUTE(POSITION_RATE, tick)) { //位置控制
positionController(&actuatorThrust, &attitudeDesired, setpoint, state);
}
if (RATE_DO_EXECUTE(ATTITUDE_RATE, tick)) {
// Switch between manual and automatic position control
if (setpoint->mode.z == modeDisable) {
actuatorThrust = setpoint->thrust;
}
if (setpoint->mode.x == modeDisable || setpoint->mode.y == modeDisable) {
attitudeDesired.roll = setpoint->attitude.roll;
attitudeDesired.pitch = setpoint->attitude.pitch;
}
attitudeControllerCorrectAttitudePID(state->attitude.roll, state->attitude.pitch, state->attitude.yaw,
attitudeDesired.roll, attitudeDesired.pitch, attitudeDesired.yaw,
&rateDesired.roll, &rateDesired.pitch, &rateDesired.yaw);
// For roll and pitch, if velocity mode, overwrite rateDesired with the setpoint
// value. Also reset the PID to avoid error buildup, which can lead to unstable
// behavior if level mode is engaged later
if (setpoint->mode.roll == modeVelocity) {
rateDesired.roll = setpoint->attitudeRate.roll;
attitudeControllerResetRollAttitudePID();
}
if (setpoint->mode.pitch == modeVelocity) {
rateDesired.pitch = setpoint->attitudeRate.pitch;
attitudeControllerResetPitchAttitudePID();
}
// TODO: Investigate possibility to subtract gyro drift.
attitudeControllerCorrectRatePID(sensors->gyro.x, -sensors->gyro.y, sensors->gyro.z,
rateDesired.roll, rateDesired.pitch, rateDesired.yaw);
attitudeControllerGetActuatorOutput(&control->roll,
&control->pitch,
&control->yaw);
control->yaw = -control->yaw;
}
if (tiltCompensationEnabled)
{
control->thrust = actuatorThrust / sensfusion6GetInvThrustCompensationForTilt();
}
else
{
control->thrust = actuatorThrust;
}
if (control->thrust == 0)
{
control->thrust = 0;
control->roll = 0;
control->pitch = 0;
control->yaw = 0;
attitudeControllerResetAllPID();
positionControllerResetAllPID();
// Reset the calculated YAW angle for rate control
attitudeDesired.yaw = state->attitude.yaw;
}
}
Mellinger 控制器¶
Mellinger 控制器是一种 多合一 控制器,基于目标位置和目标位置速度矢量,直接计算出需要分配给所有电动机的所需推力。
详情可参考论文:Minimum snap trajectory generation and control for quadrotors。
INDI 控制器¶
INDI 控制器是立即处理角速率以确定信任度的控制器,与传统的 PID 控制器相结合,对于角度处理相比串级 PID 控制器组合的速度要快。
详情可参考论文:Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Air Vehicles。
PID 参数整定¶
Rate PID 整定¶
先调整
Rate模式,将rollType、pitchType和yawType都调整为RATE;将
ATTITUDE模式对应的roll、pitch和yaw的KP、KI和KD调整为0.0,仅保留Rate相关的参数;将
RATE模式对应的roll、pitch和yaw的KI和KD调整为0.0,先调整比例控制KP;烧写代码,使用 cfclient 的 param 功能开始在线进行
KP的调整;注意,使用 cfclient 修改后的参数,掉电不保存;
在 PID 调整期间会出现震荡(超调)的情况,请注意安全;
先固定住飞行器,让其只能进行
pitch轴的翻转。逐渐增加pitch对应的KP,直到飞机出现前后的震荡;当出现严重的震荡时,可以稍微降低
KP,以恰好达到震荡的临界点为基础,降低 5-10 个百分点即可确定KP参数;使用同样的方法调整
roll和yaw;调整
KI,该参数用于消除稳态误差。如果不引入该参数,只有比例调整的话,飞行器受到重力等干扰会在 0 位置上下摆动。设置KI的初始值为KP的 50%;当
KI增大到一定程度,也会导致飞机不稳定晃动。但KI造成的晃动频率相比KP带来的震动,频率更小。以恰好造成震动的临界KI为基础,减小 5-10 个百分点,确定最终的KI值;使用同样的方法调整
roll和yaw;一般情况下
KI的取值为KP取值的 80% 以上。
Attitude PID 整定¶
确保
Rate PID调整已经完成;将
rollType、pitchType和yawType都调整为ANGLE,即飞机已进入 attitude mode;改变
roll和pitch的KI和KD为0.0,将Yaw的KP、KI、KD都设置为0.0;烧写代码,使用 cfclient 的 param 功能开始在线进行
KP的调整;将
roll和pitch的KP设置为3.5,查找任何存在的不稳定性,例如振荡。持续增加 KP,直到达到极限;如果发现
KP导致不稳定,如果此时已经高于4,需要将RATE模式的KP和KI稍微降低 5 ~ 10 点。实现调整姿势模式时更加自由;要调整 KI,请再次缓慢增加 KI。不稳定性的状态是产生低频振荡。