快速入门¶
项目简介¶
ESP-Drone 是基于乐鑫 ESP32/ESP32-S2/ESP32-S3 开发的小型无人机解决方案,可使用手机 APP 或游戏手柄通过 Wi-Fi 网络进行连接和控制。该方案硬件结构简单,代码架构清晰,支持功能扩展,可用于 STEAM 教育等领域。项目部分代码来自 Crazyflie 开源工程,继承 GPL3.0 开源协议。

ESP-Drone 无人机¶
主要特性¶
ESP-Drone 具备以下特性:
支持自稳定模式 (Stabilize mode):自动控制机身水平,保持平稳飞行。
支持定高模式 (Height-hold mode):自动控制油门输出,保持固定高度。
支持定点模式 (Position-hold mode):自动控制机身角度,保持固定空间位置。
支持 PC 上位机调试:使用 cfclient 上位机进行静态/动态调试。
支持 APP 控制:使用手机 APP 通过 Wi-Fi 轻松控制。
支持游戏手柄 (gamepad) 控制:通过 cfclient 使用游戏手柄轻松控制。
主要组件¶
ESP-Drone 2.0 使用模块化的设计思路,由主控板和扩展板组成。
主控制板:搭载 ESP32-S2 模组和支持基础飞行的必要传感器,并提供硬件扩展接口。
扩展板:搭载扩展传感器,可对接主控制板的硬件扩展接口,支持高级飞行功能。
序号 |
模块名 |
主要元器件 |
功能 |
接口 |
安装位置 |
|---|---|---|---|---|---|
1 |
主控制板 - ESP32-S2 |
ESP32-S2-WROVER + MPU6050 |
基础飞行 |
提供 I2C SPI GPIO 扩展接口 |
|
2 |
扩展板 - 定点模块 |
PMW3901 + VL53L1X |
室内定点飞行 |
SPI + I2C |
底部,面向地面 |
3 |
扩展板 - 气压定高模块 |
MS5611 气压 |
气压定高 |
I2C 或 MPU6050 从机 |
顶部或底部 |
4 |
扩展板 - 指南针模块 |
HMC5883 罗盘 |
无头模式等高级模式 |
I2C 或 MPU6050 从机 |
顶部或底部 |
详情可查阅:硬件参考。
ESP-IDF 简介¶
ESP-IDF 是乐鑫为 ESP32/ESP32-S2/ESP32-S3 提供的物联网开发框架。
ESP-IDF 包含一系列库及头文件,提供了基于 ESP32/ESP32-S2/ESP32-S3 构建软件项目所需的核心组件。
ESP-IDF 还提供了开发和量产过程中最常用的工具及功能,例如:构建、烧录、调试和测量等。
详情可查阅:ESP-IDF 编程指南。
Crazyflie 简介¶
Crazyflie 是来自 Bitcraze 开源工程的四旋翼飞行器,具备以下特性:
支持多种传感器组合,可以轻松实现定高模式、定点模式等高级飞行模式。
基于 FreeRTOS 编写,将复杂的无人机系统,分解成多个具有不同优先级的软件任务。
设计了功能完备的 cfclient 上位机和 CRTP 通信协议,便于实现调试、测量和控制。

多架无人机同时探索周围环境,灵活避开障碍物,同时避开其它无人机。A swarm of drones exploring the environment, avoiding obstacles and each other. (Guus Schoonewille, TU Delft)¶
{kind=link}
详情可查阅 Crazyflie 官网。
准备工作¶
硬件组装¶
请按照下述步骤组装 ESP32-S2-Drone V1.2:
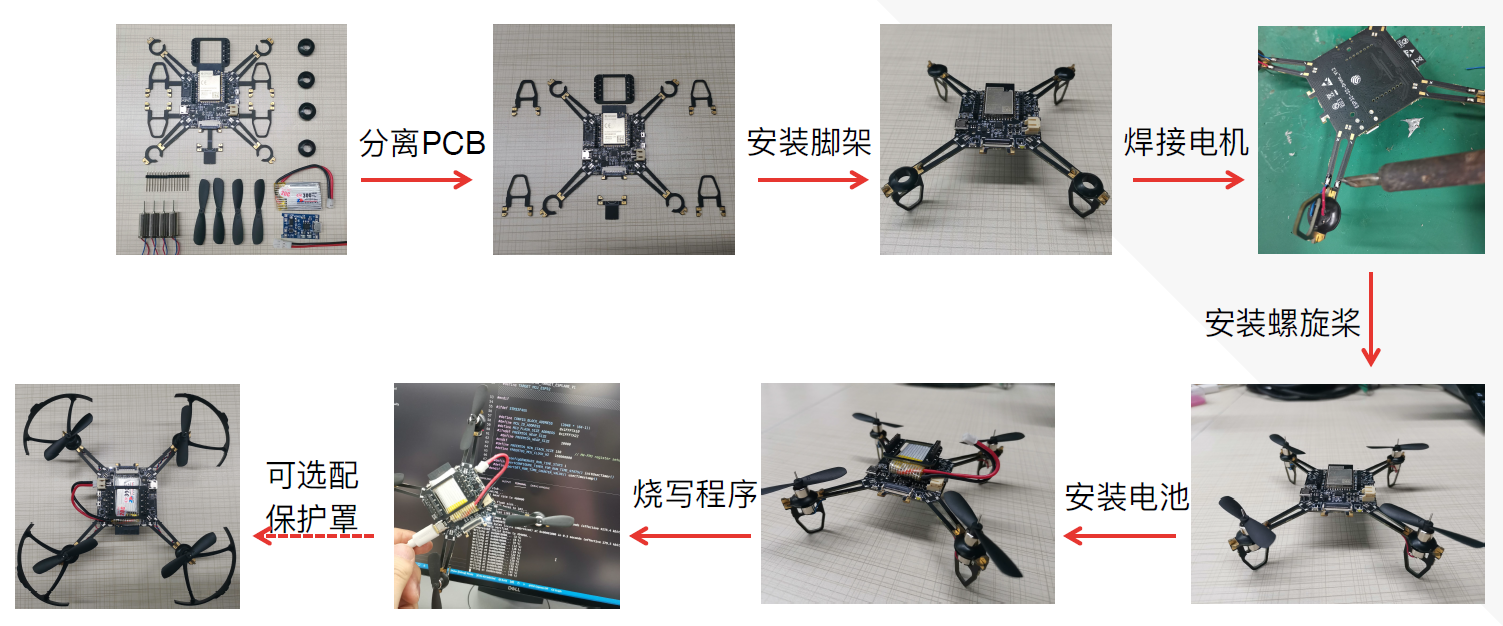
ESP32-S2-Drone V1.2 组装流程¶
硬件介绍和管脚资源分配可查阅:硬件参考。
安装 ESP-Drone APP¶
ESP-Drone APP 同时支持 Android 系统和 iOS 系统。
扫描下方二维码,下载 Android APP:

下载 iOS APP:
在 App Store 中搜索 ESP-Drone,点击下载并安装。
iOS APP 源代码:ESP-Drone-iOS
Android APP 源代码:ESP-Drone-Android
安装 cfclient¶
安装 cfclient 为可选步骤,用于实现高级调试,非必须使用。
cfclient 上位机界面¶
1. 安装 cfclient
1.1 下载源代码
git clone https://github.com/qljz1993/crazyflie-clients-python.git
1.2 进入下载目录
cd crazyflie-clients-python
1.3 安装 cfclient 客户端
pip3 install -e .
1.4 启动客户端
cfclient
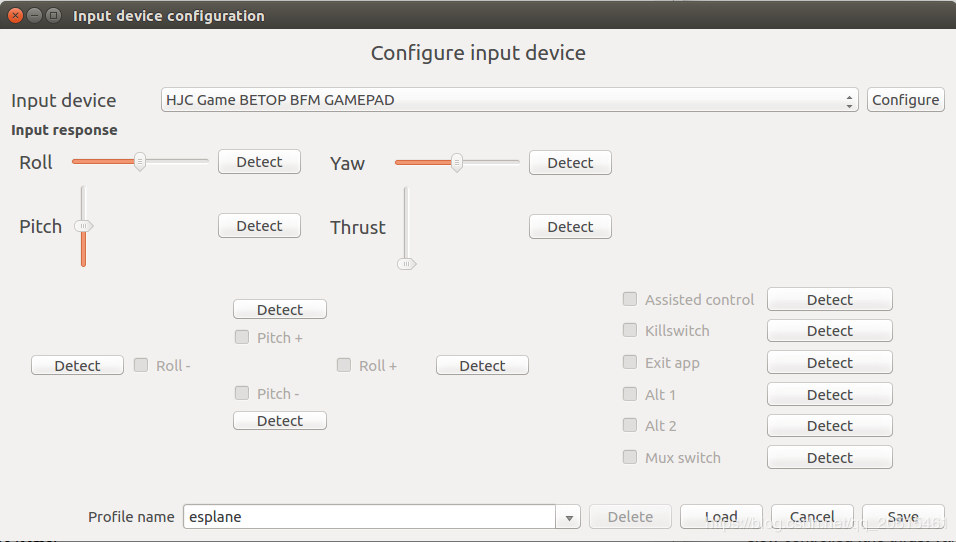
2. 配置遥控器
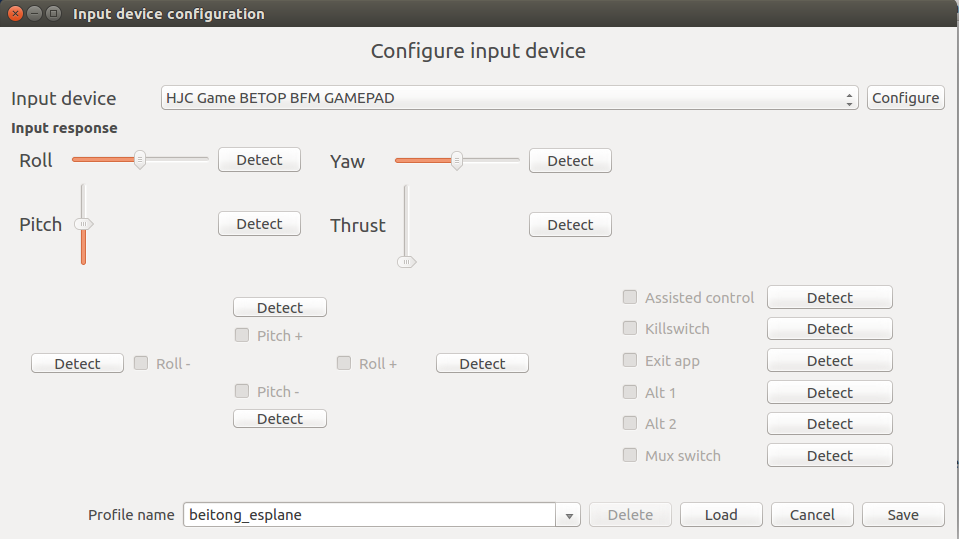
遥控器配置¶
2.1 配置 4 个控制轴:Roll 、Pitch、Yaw、Thrust。
2.2 配置一个按键为 Assisted control,用于飞行模式切换。
手机 APP 使用指南¶
Wi-Fi 连接¶
手机扫描 Wi-Fi AP。ESP-Drone 设备用作 AP,其 SSID 及密码如下:
SSID:ESP-DRONE_XXXX(XXXX 根据 MAC 设置)PASSWORD:12345678
点击该 AP,手机与 ESP-Drone 设备建立 Wi-Fi 连接。
个性化设置¶
在该步骤中,您可以按照具体的应用场景进行个性化配置,或使用默认配置。
```
默认配置:
Flight control settings
1. Mode: Mode2
2. Deadzone: 0.2
3. Roll trim: 0.0
4. Pitch trim: 0.0
5. Advanced flight control : true
6. Advanced flight control preferences
1. max roll/pitch angle: 15
2. max yaw angle: 90
3. max thrust: 90
4. min thrust: 25
5. X-Mode: true
Controller settings
1. use full travel for thrust: false
2. virtual joystick size: 100
App settings
1. Screen rotation lock: true
2. full screen mode:true
3. show console: true
```
控制飞行¶
打开 APP,点击 Connect 按钮,连接小飞机。连接成功,小飞机绿灯闪烁。
轻推油门,小飞机起飞。
在 APP 上滑动,控制小飞机方向。
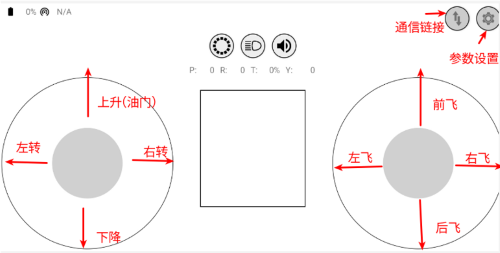
Android APP 用户界面¶
PC cfclient 使用指南¶
cfclient 是 Crazeflie 源工程的上位机,完全实现了 CRTP
协议中定义的功能,可以加快飞机的调试过程。ESP-Drone
项目对该上位机进行裁剪和调整,满足功能设计需求。
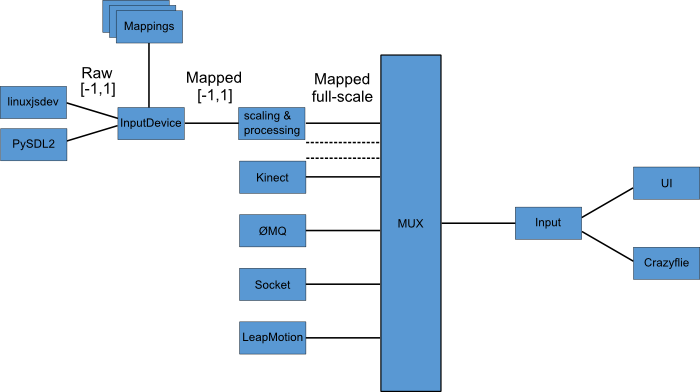
cfclient 架构¶
cfclient 控制台界面¶
项目中有很多相关的文件,例如配置文件和缓存文件,其中 JSON 文件用来存储配置信息。关于配置信息中内容的解读,可参考:User Configuration File。
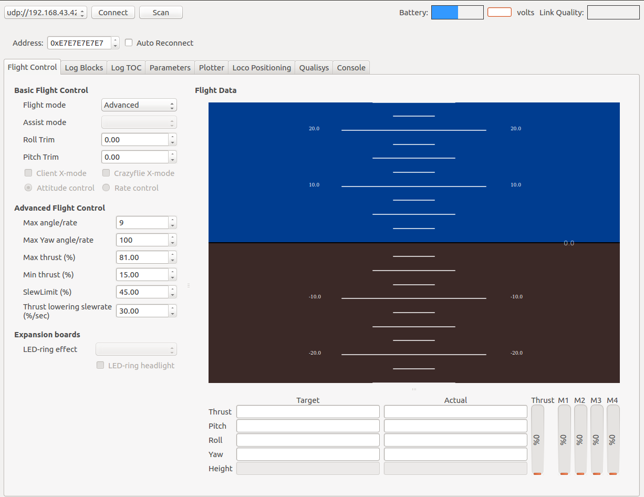
飞行设置¶
基本飞行设置 (Basic Flight Control)¶
飞行模式 (Flight mode):基本模式和高级模式
基本模式 (Normal mode):初学者使用。
高级模式 (Advanced mode):设置解锁最大角度,设置最大油门。
自动模式 (Assisted mode)
定海拔模式 (Altitude-hold mode):保持飞行海拔,需要气压计支持。
定点模式 (Position-hold mode):保持当前位置,需要光流和 TOF 支持。
定高模式 (Height-hold mode):保持相对高度,触发时保持高于地面 40 cm,需要 TOF 支持。
悬停模式 (Hover mode):触发时保持高于地面 40 cm,并悬停在起飞点,需要光流和 TOF 支持。
角度修正 (Trim)
翻滚角修正 (Roll Trim):用于弥补传感器水平安装误差。
俯仰角修正 (Pitch Trim):用于弥补传感器水平安装误差。
注意,在自动模式下,油门摇杆变为高度控制摇杆。
高级飞行设置 (Advanced Flight Control)¶
最大倾角 (Max angle):设置最大允许的俯仰和翻滚角度:roll/pitch。
最大自旋速度 (Max yaw rate):设置允许的偏航速度:yaw。
最大油门 (Max thrust):设置最大油门。
最小油门 (Min thrust):设置最小油门。
压摆极限 (Slew limit):防止油门骤降,油门低于该值时,下降速度将被限定。
压摆率 (Slew rate):油门到压摆极限之后的最大下降率。
遥控器设置 (Configure Input Device)¶
按照提示绑定遥控器摇杆与各个控制通道:
飞行数据 (Flight Data)¶
驾驶仪可以看到当前飞机姿态,右下方显示对应的详细数据。
目标角度 (Target)
测量角度 (Actual)
当前油门值 (Thrust)
电机实际输出 (M1/M2/M3/M4)
在线参数修改¶
在线调整 PID 参数
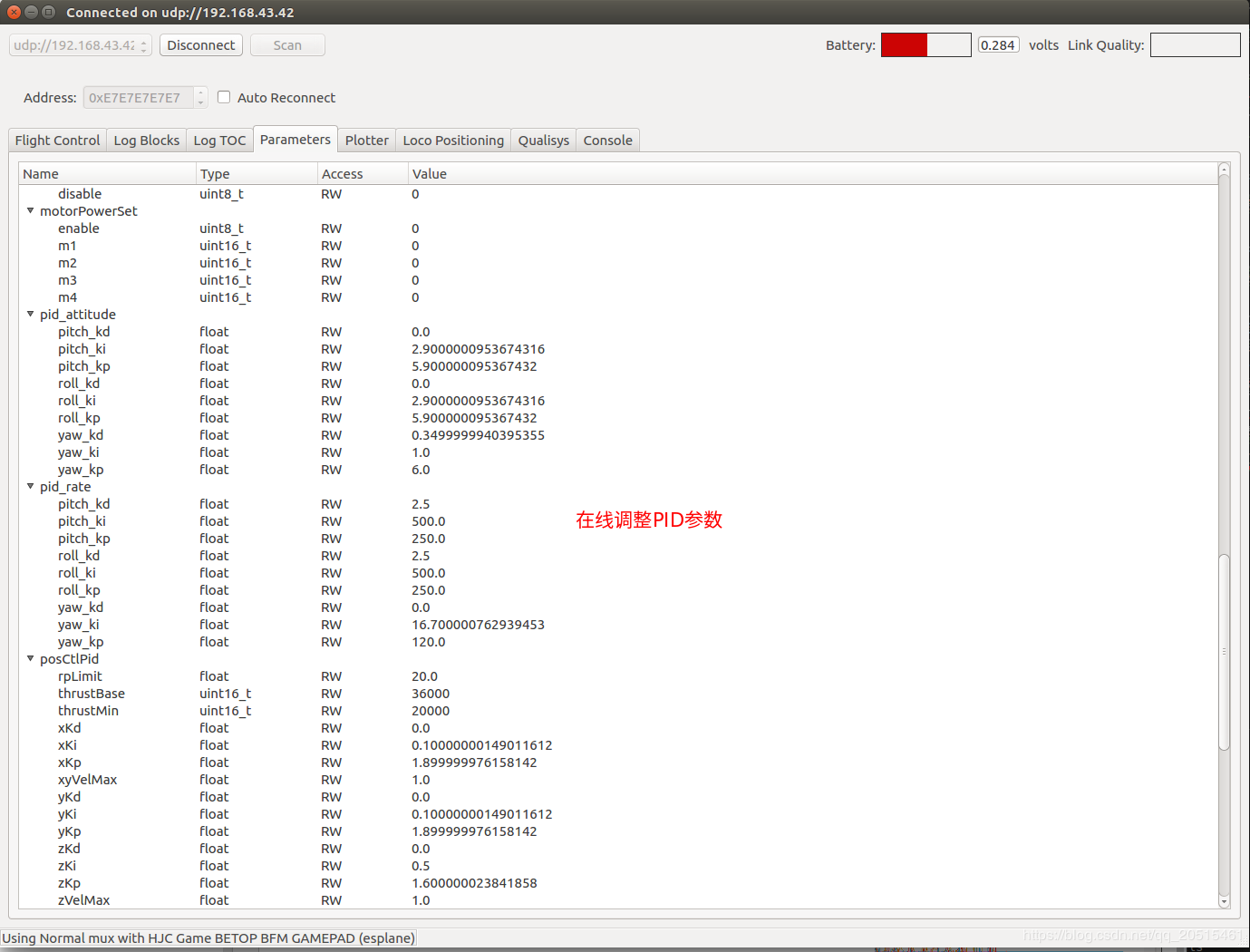
cfclient PID 参数调整¶
注意事项
修改的参数实时生效,避免了频繁烧录固件。
可在代码中通过宏定义,配置哪些参数可被上位机实时修改。
注意,参数在线修改仅用于调试,掉电不保存。
飞行数据监控¶
配置要监控的参数
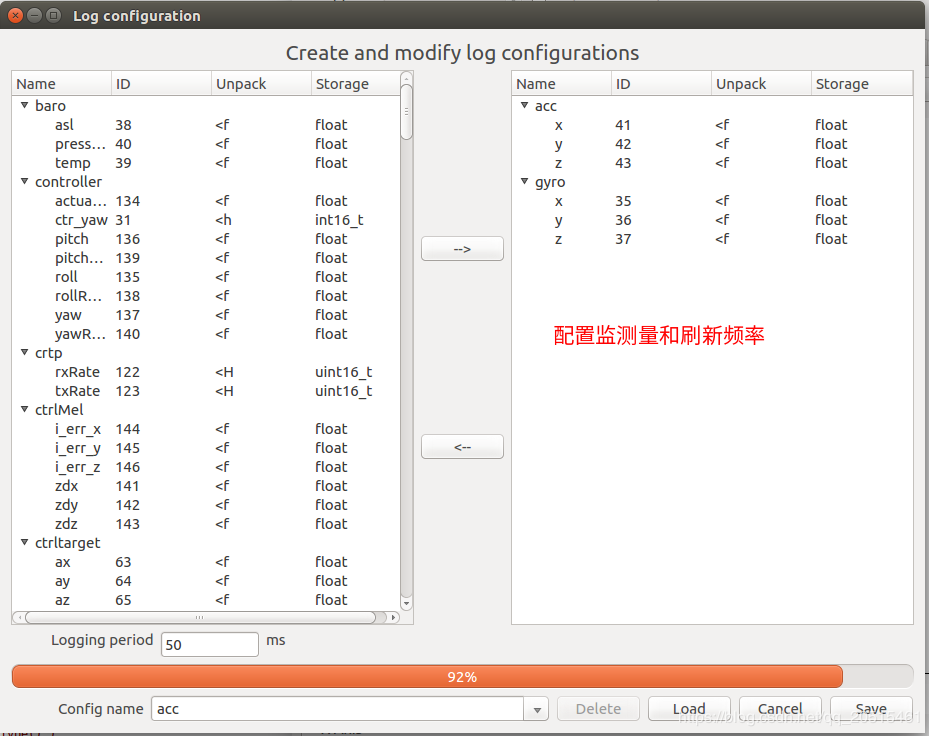
监控参数配置¶
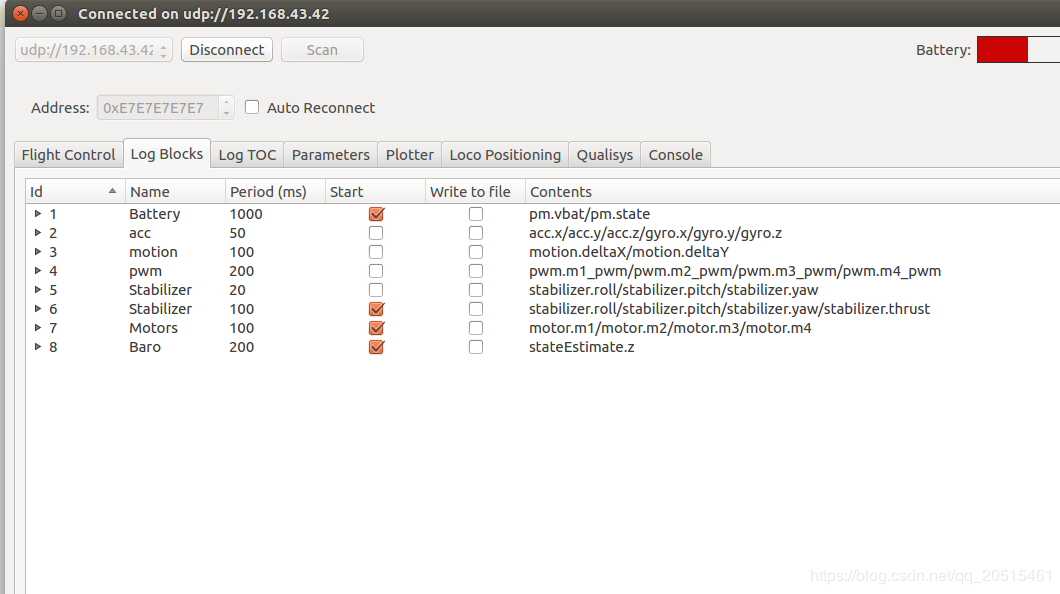
参数配置区¶
实时波形绘制
陀螺仪加速度计实时数据监测:
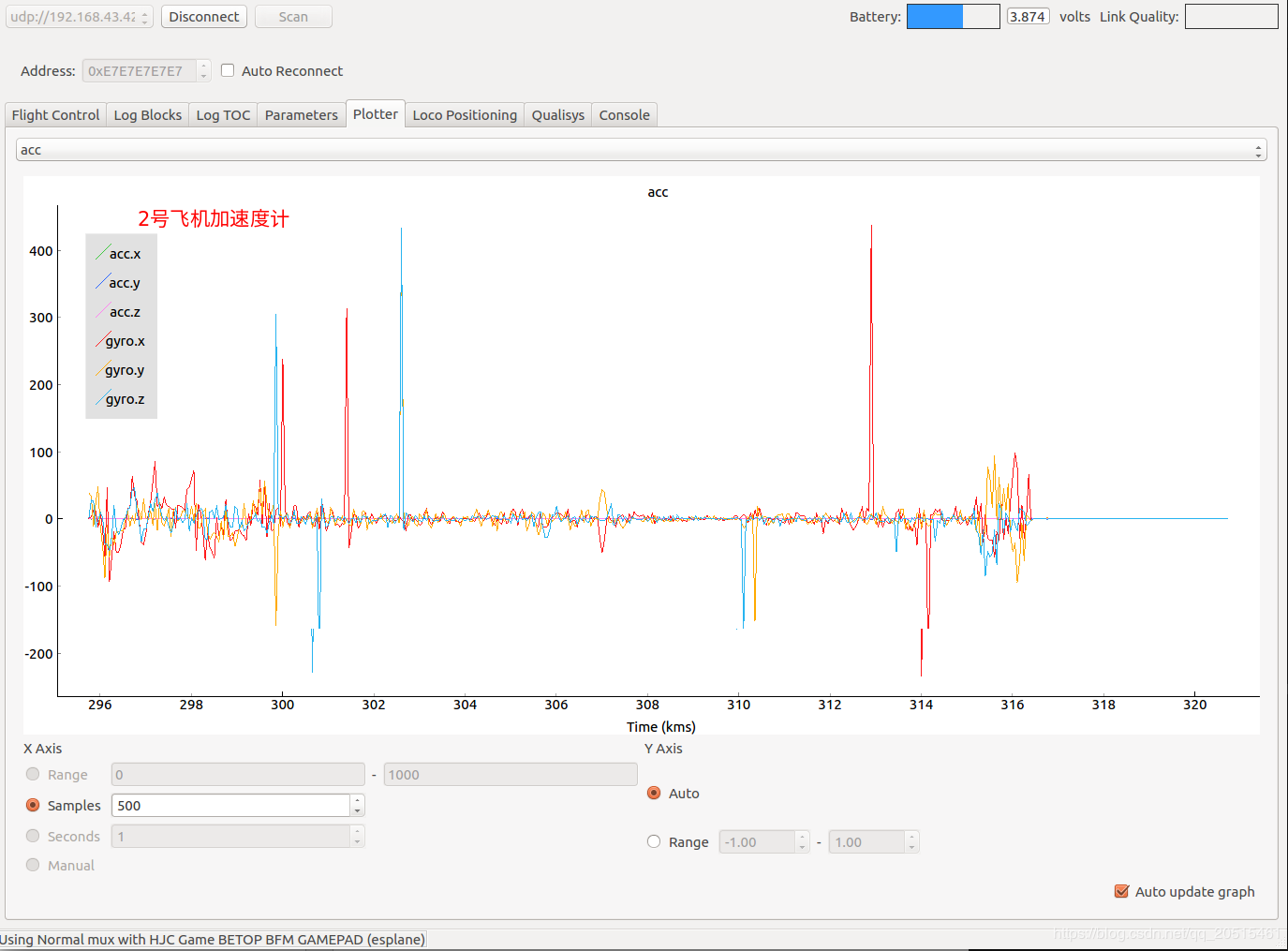
陀螺仪加速度计数据监测¶
螺旋桨方向¶
按照下图所示位置,安装 A、B 螺旋桨。
飞行器上电自检时,检查螺旋桨转向是否正确。

螺旋桨方向示图¶
起飞前检查¶
将小飞机头部朝前放置,尾部天线朝向自己;
将小飞机置于水平面上,待机身稳定时上电;
观察上位机水平面是否置平;
观察通信建立以后,小飞机尾部绿灯是否快速闪烁;
观察小飞机头部红灯是否熄灭,亮起代表电量不足;
轻推左手小油门,检查飞机是否能快速响应;
轻推右手方向,检查方向控制是否正确;
起飞吧!