Inter-IC Sound (I2S)
Introduction
I2S (Inter-IC Sound) is a synchronous serial communication protocol usually used for transmitting audio data between two digital audio devices.
ESP32-S2 contains one I2S peripheral(s). These peripherals can be configured to input and output sample data via the I2S driver.
An I2S bus that communicates in standard mode consists of the following lines:
MCLK: Master clock line. It is an optional signal depending on the slave side, mainly used for offering a reference clock to the I2S slave device.
BCLK: Bit clock line. The bit clock for data line.
WS: Word (Slot) select line. It is usually used to identify the vocal tract except PDM mode.
DIN/DOUT: Serial data input/output line. Data will loopback internally if DIN and DOUT are set to a same GPIO.
Each I2S controller has the following features that can be configured by the I2S driver:
Operation as system master or slave
Capable of acting as transmitter or receiver
DMA controller that allows stream sampling of data without requiring the CPU to copy each data sample
Each controller supports single RX or TX simplex communication. As RX and TX channels share a clock, they can only be combined with the same configuration to establish a full-duplex communication.
I2S Clock
Clock Source
i2s_clock_src_t::I2S_CLK_SRC_DEFAULT: Default clock source. The actual source clock depends on the chip. See chip's Technical Reference Manual for details.i2s_clock_src_t::I2S_CLK_SRC_APLL: Audio PLL clock. Its frequency is configurable according to the sample rate, which makes it more precise in high sample rate applications. However, if APLL has been occupied by EMAC or other channels, the APLL frequency cannot be changed, and the driver will try to work under this APLL frequency. If this frequency cannot meet the requirements of I2S, the clock configuration will fail.
Clock Terminology
Sample rate: The number of sampled data in one second per slot.
SCLK: Source clock frequency. It is the frequency of the clock source.
MCLK: Master clock frequency. BCLK is generated from this clock. The MCLK signal usually serves as a reference clock and is mostly needed to synchronize BCLK and WS between I2S master and slave roles.
BCLK: Bit clock frequency. Every tick of this clock stands for one data bit on data pin. The slot bit width configured in
i2s_std_slot_config_t::slot_bit_widthis equal to the number of BCLK ticks, which means there will be 8/16/24/32 BCLK ticks in one slot.LRCK / WS: Left/right clock or word select clock. For non-PDM mode, its frequency is equal to the sample rate.
Note
Normally, MCLK should be the multiple of sample rate and BCLK at the same time. The field i2s_std_clk_config_t::mclk_multiple indicates the multiple of MCLK to the sample rate. In most cases, I2S_MCLK_MULTIPLE_256 should be enough. However, if slot_bit_width is set to I2S_SLOT_BIT_WIDTH_24BIT, to keep MCLK a multiple to the BCLK, i2s_std_clk_config_t::mclk_multiple should be set to multiples that are divisible by 3 such as I2S_MCLK_MULTIPLE_384. Otherwise, WS will be inaccurate.
I2S Communication Mode
Overview of All Modes
Target |
Standard |
PCM-to-PDM |
PDM-to-PCM |
PDM |
TDM |
ADC/DAC |
LCD/Camera |
|---|---|---|---|---|---|---|---|
ESP32 |
I2S 0/1 |
I2S 0 |
I2S 0 |
I2S 0/1 |
none |
I2S 0 |
I2S 0 |
ESP32-S2 |
I2S 0 |
none |
none |
none |
none |
none |
I2S 0 |
ESP32-S3 |
I2S 0/1 |
I2S 0 |
I2S 0 |
I2S 0/1 |
I2S 0/1 |
none |
none |
ESP32-P4 |
I2S 0~2 |
I2S 0 |
I2S 0 |
I2S 0~2 |
I2S 0~2 |
none |
none |
others |
I2S 0 |
I2S 0 |
none |
I2S 0 |
I2S 0 |
none |
none |
Note
If you are using PDM mode, note that not all I2S ports support conversion between raw PDM and PCM formats, because these ports do not have PCM-to-PDM data format converter in TX direction, or PDM-to-PCM data format converter in RX direction. Ports without the converter can only read/write raw PDM data. To read/write PCM format data on these ports, you may need an extra software filter for PDM-to-PCM conversion.
Standard Mode
In standard mode, there are always two sound channels, i.e., the left and right channels, which are called "slots". These slots support 8/16/24/32-bit width sample data. The communication format for the slots mainly includes the following:
Philips Format: Data signal has one-bit shift comparing to the WS signal, and the duty of WS signal is 50%.
MSB Format: Basically the same as Philips format, but without data shift.
PCM Short Format: Data has one-bit shift and meanwhile the WS signal becomes a pulse lasting for one BCLK cycle.
LCD/Camera Mode
LCD/Camera mode is only supported on I2S0 over a parallel bus. For LCD mode, I2S0 should work at master TX mode. For camera mode, I2S0 should work at slave RX mode. These two modes are not implemented by the I2S driver. Please refer to I80 Interfaced LCD for details about the LCD implementation. For more information, see ESP32-S2 Technical Reference Manual > I2S Controller (I2S) > LCD Mode [PDF].
Functional Overview
The I2S driver offers the following services:
Resource Management
There are three levels of resources in the I2S driver:
platform level: Resources of all I2S controllers in the current target.controller level: Resources in one I2S controller.channel level: Resources of TX or RX channel in one I2S controller.
The public APIs are all channel-level APIs. The channel handle i2s_chan_handle_t can help users to manage the resources under a specific channel without considering the other two levels. The other two upper levels' resources are private and are managed by the driver automatically. Users can call i2s_new_channel() to allocate a channel handle and call i2s_del_channel() to delete it.
Power Management
When the power management is enabled (i.e., CONFIG_PM_ENABLE is on), the system will adjust or stop the source clock of I2S before entering Light-sleep, thus potentially changing the I2S signals and leading to transmitting or receiving invalid data.
The I2S driver can prevent the system from changing or stopping the source clock by acquiring a power management lock. When the source clock is generated from APB, the lock type will be set to esp_pm_lock_type_t::ESP_PM_APB_FREQ_MAX and when the source clock is APLL (if supported), it will be set to esp_pm_lock_type_t::ESP_PM_NO_LIGHT_SLEEP. The driver guarantees that the power management lock is acquired when the channel is enabled by i2s_channel_enable(). Likewise, the driver releases the lock when the channel is disabled by i2s_channel_disable(), which keeps the I2S source clock stable while the channel is running.
Finite State Machine
There are three states for an I2S channel, namely, registered, ready, and running. Their relationship is shown in the following diagram:
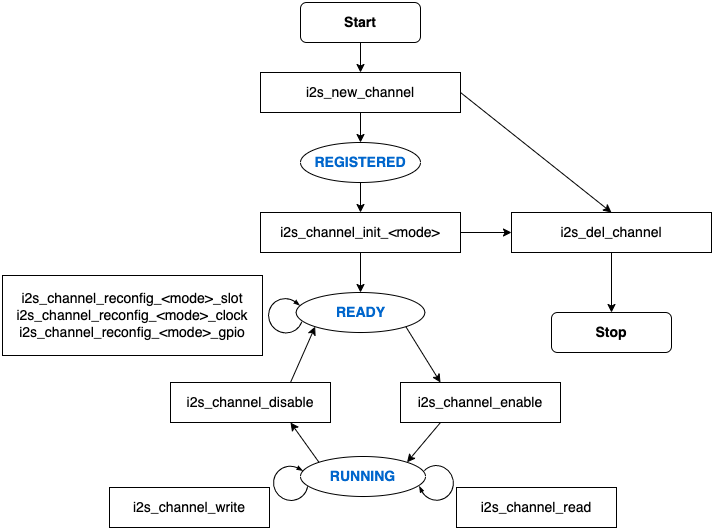
I2S Finite State Machine
The <mode> in the diagram can be replaced by corresponding I2S communication modes, e.g., std for standard two-slot mode. For more information about communication modes, please refer to the I2S Communication Mode section.
Data Transport
The data transport of the I2S peripheral, including sending and receiving, is realized by DMA. Before transporting data, please call i2s_channel_enable() to enable the specific channel. When the sent or received data reaches the size of one DMA buffer, the I2S_OUT_EOF or I2S_IN_SUC_EOF interrupt will be triggered. Note that the DMA buffer size is not equal to i2s_chan_config_t::dma_frame_num. One frame here refers to all the sampled data in one WS circle. Therefore, dma_buffer_size = dma_frame_num * slot_num * slot_bit_width / 8. For the data transmitting, users can input the data by calling i2s_channel_write(). This function helps users to copy the data from the source buffer to the DMA TX buffer and wait for the transmission to finish. Then it will repeat until the sent bytes reach the given size. For the data receiving, the function i2s_channel_read() waits to receive the message queue which contains the DMA buffer address. It helps users copy the data from the DMA RX buffer to the destination buffer.
Both i2s_channel_write() and i2s_channel_read() are blocking functions. They keeps waiting until the whole source buffer is sent or the whole destination buffer is loaded, unless they exceed the max blocking time, where the error code ESP_ERR_TIMEOUT returns. To send or receive data asynchronously, callbacks can be registered by i2s_channel_register_event_callback(). Users are able to access the DMA buffer directly in the callback function instead of transmitting or receiving by the two blocking functions. However, please be aware that it is an interrupt callback, so do not add complex logic, run floating operation, or call non-reentrant functions in the callback.
Configuration
Users can initialize a channel by calling corresponding functions (i.e., i2s_channel_init_std_mode(), i2s_channel_init_pdm_rx_mode(), i2s_channel_init_pdm_tx_mode(), or i2s_channel_init_tdm_mode()) to a specific mode. If the configurations need to be updated after initialization, users have to first call i2s_channel_disable() to ensure that the channel has stopped, and then call corresponding reconfig functions, like i2s_channel_reconfig_std_slot(), i2s_channel_reconfig_std_clock(), and i2s_channel_reconfig_std_gpio().
Advanced API
To satisfy the high quality audio requirement, following advanced APIs are provided:
i2s_channel_preload_data(): Preloading audio data into the I2S internal cache, enabling the TX channel to immediately send data upon activation, thereby reducing the initial audio output delay.i2s_channel_tune_rate(): Dynamically fine-tuning the audio rate at runtime to match the speed of the audio data producer and consumer, thereby preventing the accumulation or shortage of intermediate buffered data that caused by rate mismatches.
IRAM Safe
By default, the I2S interrupt will be deferred when the cache is disabled for reasons like writing/erasing flash. Thus the EOF interrupt will not get executed in time.
To avoid such case in real-time applications, you can enable the Kconfig option CONFIG_I2S_ISR_IRAM_SAFE that:
Keeps the interrupt being serviced even when the cache is disabled.
Places driver object into DRAM (in case it is linked to PSRAM by accident).
This allows the interrupt to run while the cache is disabled, but comes at the cost of increased IRAM consumption.
Thread Safety
All the public I2S APIs are guaranteed to be thread safe by the driver, which means users can call them from different RTOS tasks without protection by extra locks. Notice that the I2S driver uses mutex lock to ensure the thread safety, thus these APIs are not allowed to be used in ISR.
Kconfig Options
CONFIG_I2S_ISR_IRAM_SAFE controls whether the default ISR handler can work when the cache is disabled. See IRAM Safe for more information.
CONFIG_I2S_ENABLE_DEBUG_LOG is used to enable the debug log output. Enable this option increases the firmware binary size.
Application Example
The examples of the I2S driver can be found in the directory peripherals/i2s. Here are some simple usages of each mode:
Standard TX/RX Usage
peripherals/i2s/i2s_codec/i2s_es8311 demonstrates how to use the I2S ES8311 audio codec with ESP32-S2 to play music or echo sounds, featuring high performance and low power multi-bit delta-sigma audio ADC and DAC, with options to customize music and adjust mic gain and volume.
peripherals/i2s/i2s_basic/i2s_std demonstrates how to use the I2S standard mode in either simplex or full-duplex mode on ESP32-S2.
Different slot communication formats can be generated by the following helper macros for standard mode. As described above, there are three formats in standard mode, and their helper macros are:
Note
The standard mode slot helper macros set i2s_std_slot_config_t::ws_width according to the bits_per_sample argument. If i2s_std_slot_config_t::slot_bit_width is manually changed after using a helper macro, update i2s_std_slot_config_t::ws_width as needed. For Philips and MSB formats, set ws_width to the slot bit width to keep the WS duty cycle at 50%. For PCM short format, ws_width should remain 1 BCLK.
The clock config helper macro is:
Please refer to Standard Mode for information about STD API. And for more details, please refer to esp_driver_i2s/include/driver/i2s_std.h.
STD TX Mode
Take 16-bit data width for example. When the data in a uint16_t writing buffer are:
data 0 |
data 1 |
data 2 |
data 3 |
data 4 |
data 5 |
data 6 |
data 7 |
... |
|---|---|---|---|---|---|---|---|---|
0x0001 |
0x0002 |
0x0003 |
0x0004 |
0x0005 |
0x0006 |
0x0007 |
0x0008 |
... |
Here is the table of the real data on the line with different i2s_std_slot_config_t::slot_mode and i2s_std_slot_config_t::slot_mask.
data bit width |
slot mode |
slot mask |
WS low |
WS high |
WS low |
WS high |
WS low |
WS high |
WS low |
WS high |
|---|---|---|---|---|---|---|---|---|---|---|
16 bit |
mono |
left |
0x0001 |
0x0000 |
0x0002 |
0x0000 |
0x0003 |
0x0000 |
0x0004 |
0x0000 |
right |
0x0000 |
0x0001 |
0x0000 |
0x0002 |
0x0000 |
0x0003 |
0x0000 |
0x0004 |
||
both |
0x0001 |
0x0001 |
0x0002 |
0x0002 |
0x0003 |
0x0003 |
0x0004 |
0x0004 |
||
stereo |
left |
0x0001 |
0x0001 |
0x0003 |
0x0003 |
0x0005 |
0x0005 |
0x0007 |
0x0007 |
|
right |
0x0002 |
0x0002 |
0x0004 |
0x0004 |
0x0006 |
0x0006 |
0x0008 |
0x0008 |
||
both |
0x0001 |
0x0002 |
0x0003 |
0x0004 |
0x0005 |
0x0006 |
0x0007 |
0x0008 |
Note
Similar for 8-bit and 32-bit data widths, the type of the buffer is better to be uint8_t and uint32_t. But specially, when the data width is 24-bit, the data buffer should be aligned with 3-byte (i.e., every 3 bytes stands for a 24-bit data in one slot). Additionally, i2s_chan_config_t::dma_frame_num, i2s_std_clk_config_t::mclk_multiple, and the writing buffer size should be the multiple of 3, otherwise the data on the line or the sample rate will be incorrect.
#include "driver/i2s_std.h"
#include "driver/gpio.h"
i2s_chan_handle_t tx_handle;
/* Get the default channel configuration by the helper macro.
* This helper macro is defined in `i2s_common.h` and shared by all the I2S communication modes.
* It can help to specify the I2S role and port ID */
i2s_chan_config_t chan_cfg = I2S_CHANNEL_DEFAULT_CONFIG(I2S_NUM_AUTO, I2S_ROLE_MASTER);
/* Allocate a new TX channel and get the handle of this channel */
i2s_new_channel(&chan_cfg, &tx_handle, NULL);
/* Setting the configurations, the slot configuration and clock configuration can be generated by the macros
* These two helper macros are defined in `i2s_std.h` which can only be used in STD mode.
* They can help to specify the slot and clock configurations for initialization or updating */
i2s_std_config_t std_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(48000),
.slot_cfg = I2S_STD_MSB_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_32BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = I2S_GPIO_UNUSED,
.bclk = GPIO_NUM_4,
.ws = GPIO_NUM_5,
.dout = GPIO_NUM_18,
.din = I2S_GPIO_UNUSED,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
/* Initialize the channel */
i2s_channel_init_std_mode(tx_handle, &std_cfg);
/* Before writing data, start the TX channel first */
i2s_channel_enable(tx_handle);
i2s_channel_write(tx_handle, src_buf, bytes_to_write, bytes_written, ticks_to_wait);
/* If the configurations of slot or clock need to be updated,
* stop the channel first and then update it */
// i2s_channel_disable(tx_handle);
// std_cfg.slot_cfg.slot_mode = I2S_SLOT_MODE_MONO; // Default is stereo
// i2s_channel_reconfig_std_slot(tx_handle, &std_cfg.slot_cfg);
// std_cfg.clk_cfg.sample_rate_hz = 96000;
// i2s_channel_reconfig_std_clock(tx_handle, &std_cfg.clk_cfg);
/* Have to stop the channel before deleting it */
i2s_channel_disable(tx_handle);
/* If the handle is not needed any more, delete it to release the channel resources */
i2s_del_channel(tx_handle);
STD RX Mode
Taking 16-bit data width for example, when the data on the line are:
WS low |
WS high |
WS low |
WS high |
WS low |
WS high |
WS low |
WS high |
... |
|---|---|---|---|---|---|---|---|---|
0x0001 |
0x0002 |
0x0003 |
0x0004 |
0x0005 |
0x0006 |
0x0007 |
0x0008 |
... |
Here is the table of the data received in the buffer with different i2s_std_slot_config_t::slot_mode and i2s_std_slot_config_t::slot_mask.
data bit width |
slot mode |
slot mask |
data 0 |
data 1 |
data 2 |
data 3 |
data 4 |
data 5 |
data 6 |
data 7 |
|---|---|---|---|---|---|---|---|---|---|---|
16 bit |
mono |
left |
0x0001 |
0x0003 |
0x0005 |
0x0007 |
0x0009 |
0x000b |
0x000d |
0x000f |
right |
0x0002 |
0x0004 |
0x0006 |
0x0008 |
0x000a |
0x000c |
0x000e |
0x0010 |
||
stereo |
any |
0x0001 |
0x0002 |
0x0003 |
0x0004 |
0x0005 |
0x0006 |
0x0007 |
0x0008 |
Note
8-bit, 24-bit, and 32-bit are similar as 16-bit, where the data bit-width in the receiving buffer is equal to the data bit-width on the line. Additionally, when using 24-bit data width, i2s_chan_config_t::dma_frame_num, i2s_std_clk_config_t::mclk_multiple, and the receiving buffer size should be the multiple of 3, otherwise the data on the line or the sample rate will be incorrect.
#include "driver/i2s_std.h"
#include "driver/gpio.h"
i2s_chan_handle_t rx_handle;
/* Get the default channel configuration by helper macro.
* This helper macro is defined in `i2s_common.h` and shared by all the I2S communication modes.
* It can help to specify the I2S role and port ID */
i2s_chan_config_t chan_cfg = I2S_CHANNEL_DEFAULT_CONFIG(I2S_NUM_AUTO, I2S_ROLE_MASTER);
/* Allocate a new RX channel and get the handle of this channel */
i2s_new_channel(&chan_cfg, NULL, &rx_handle);
/* Setting the configurations, the slot configuration and clock configuration can be generated by the macros
* These two helper macros are defined in `i2s_std.h` which can only be used in STD mode.
* They can help to specify the slot and clock configurations for initialization or updating */
i2s_std_config_t std_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(48000),
.slot_cfg = I2S_STD_MSB_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_32BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = I2S_GPIO_UNUSED,
.bclk = GPIO_NUM_4,
.ws = GPIO_NUM_5,
.dout = I2S_GPIO_UNUSED,
.din = GPIO_NUM_19,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
/* Initialize the channel */
i2s_channel_init_std_mode(rx_handle, &std_cfg);
/* Before reading data, start the RX channel first */
i2s_channel_enable(rx_handle);
i2s_channel_read(rx_handle, desc_buf, bytes_to_read, bytes_read, ticks_to_wait);
/* Have to stop the channel before deleting it */
i2s_channel_disable(rx_handle);
/* If the handle is not needed any more, delete it to release the channel resources */
i2s_del_channel(rx_handle);
Full-duplex
Full-duplex mode registers TX and RX channel in an I2S port at the same time, and the channels share the BCLK and WS signals. Currently, standard communication modes supports full-duplex mode in the following way, but PDM full-duplex is not supported because due to different PDM TX and RX clocks.
Note that one handle can only stand for one channel. Therefore, it is still necessary to configure the slot and clock for both TX and RX channels one by one.
Note
In full-duplex mode, only one channel can work as the master that generates BCLK and WS. If both paired handles are configured as I2S_ROLE_MASTER, the handle initialized later is automatically switched to I2S_ROLE_SLAVE.
There are two methods to allocate a pair of full-duplex channels:
Allocate both TX and RX handles in a single call of
i2s_new_channel().
#include "driver/i2s_std.h"
#include "driver/gpio.h"
i2s_chan_handle_t tx_handle;
i2s_chan_handle_t rx_handle;
/* Allocate a pair of I2S channel */
i2s_chan_config_t chan_cfg = I2S_CHANNEL_DEFAULT_CONFIG(I2S_NUM_AUTO, I2S_ROLE_MASTER);
/* Allocate for TX and RX channel at the same time, then they will work in full-duplex mode */
i2s_new_channel(&chan_cfg, &tx_handle, &rx_handle);
/* Set the configurations for both channels. BCLK/WS and frame timing must match in full-duplex mode. */
i2s_std_config_t std_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(32000),
.slot_cfg = I2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_16BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = I2S_GPIO_UNUSED,
.bclk = GPIO_NUM_4,
.ws = GPIO_NUM_5,
.dout = GPIO_NUM_18,
.din = GPIO_NUM_19,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
i2s_channel_init_std_mode(tx_handle, &std_cfg);
i2s_channel_init_std_mode(rx_handle, &std_cfg);
i2s_channel_enable(tx_handle);
i2s_channel_enable(rx_handle);
...
Allocate TX and RX handles separately, and initialize them with compatible configurations.
#include "driver/i2s_std.h"
#include "driver/gpio.h"
i2s_chan_handle_t tx_handle;
i2s_chan_handle_t rx_handle;
/* Allocate a pair of I2S channels on a same port */
i2s_chan_config_t chan_cfg = I2S_CHANNEL_DEFAULT_CONFIG(I2S_NUM_0, I2S_ROLE_MASTER);
/* Allocate for TX and RX channel separately, they are not full-duplex yet */
ESP_ERROR_CHECK(i2s_new_channel(&chan_cfg, &tx_handle, NULL));
/* Set compatible configurations for both channels, then they will constitute in full-duplex mode automatically */
i2s_std_config_t std_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(32000),
.slot_cfg = I2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_16BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = I2S_GPIO_UNUSED,
.bclk = GPIO_NUM_4,
.ws = GPIO_NUM_5,
.dout = GPIO_NUM_18,
.din = GPIO_NUM_19,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
ESP_ERROR_CHECK(i2s_channel_init_std_mode(tx_handle, &std_cfg));
ESP_ERROR_CHECK(i2s_channel_enable(tx_handle));
// ...
ESP_ERROR_CHECK(i2s_new_channel(&chan_cfg, NULL, &rx_handle));
ESP_ERROR_CHECK(i2s_channel_init_std_mode(rx_handle, &std_cfg));
ESP_ERROR_CHECK(i2s_channel_enable(rx_handle));
...
Simplex Mode
To allocate a channel handle in simplex mode, i2s_new_channel() should be called for each channel. The clock and GPIO pins of TX/RX channel on ESP32-S2 are not independent, so the TX and RX channel cannot coexist on the same I2S port in simplex mode.
#include "driver/i2s_std.h"
#include "driver/gpio.h"
i2s_chan_handle_t tx_handle;
i2s_chan_handle_t rx_handle;
i2s_chan_config_t chan_cfg = I2S_CHANNEL_DEFAULT_CONFIG(I2S_NUM_AUTO, I2S_ROLE_MASTER);
ESP_ERROR_CHECK(i2s_new_channel(&chan_cfg, &tx_handle, NULL));
i2s_std_config_t std_tx_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(48000),
.slot_cfg = I2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_16BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = GPIO_NUM_0,
.bclk = GPIO_NUM_4,
.ws = GPIO_NUM_5,
.dout = GPIO_NUM_18,
.din = I2S_GPIO_UNUSED,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
/* Initialize the channel */
ESP_ERROR_CHECK(i2s_channel_init_std_mode(tx_handle, &std_tx_cfg));
ESP_ERROR_CHECK(i2s_channel_enable(tx_handle));
/* RX channel will be registered on another I2S, if no other available I2S unit found
* it will return ESP_ERR_NOT_FOUND */
ESP_ERROR_CHECK(i2s_new_channel(&chan_cfg, NULL, &rx_handle));
i2s_std_config_t std_rx_cfg = {
.clk_cfg = I2S_STD_CLK_DEFAULT_CONFIG(16000),
.slot_cfg = I2S_STD_MSB_SLOT_DEFAULT_CONFIG(I2S_DATA_BIT_WIDTH_32BIT, I2S_SLOT_MODE_STEREO),
.gpio_cfg = {
.mclk = I2S_GPIO_UNUSED,
.bclk = GPIO_NUM_6,
.ws = GPIO_NUM_7,
.dout = I2S_GPIO_UNUSED,
.din = GPIO_NUM_19,
.invert_flags = {
.mclk_inv = false,
.bclk_inv = false,
.ws_inv = false,
},
},
};
ESP_ERROR_CHECK(i2s_channel_init_std_mode(rx_handle, &std_rx_cfg));
ESP_ERROR_CHECK(i2s_channel_enable(rx_handle));
Application Notes
How to Prevent Data Lost
For applications that need a high frequency sample rate, the massive data throughput may cause data lost. Users can receive data lost event by registering the ISR callback function to receive the event queue:
static IRAM_ATTR bool i2s_rx_queue_overflow_callback(i2s_chan_handle_t handle, i2s_event_data_t *event, void *user_ctx) { // handle RX queue overflow event ... return false; } i2s_event_callbacks_t cbs = { .on_recv = NULL, .on_recv_q_ovf = i2s_rx_queue_overflow_callback, .on_sent = NULL, .on_send_q_ovf = NULL, }; TEST_ESP_OK(i2s_channel_register_event_callback(rx_handle, &cbs, NULL));
Please follow these steps to prevent data lost:
Determine the interrupt interval. Generally, when data lost happens, the bigger the interval, the better, which helps to reduce the interrupt times. This means
dma_frame_numshould be as big as possible while the DMA buffer size is below the maximum value of 4092. The relationships are:interrupt_interval(unit: sec) = dma_frame_num / sample_rate dma_buffer_size = dma_frame_num * slot_num * data_bit_width / 8 <= 4092
Determine
dma_desc_num.dma_desc_numis decided by the maximum time ofi2s_channel_readpolling cycle. All the received data is supposed to be stored between twoi2s_channel_read. This cycle can be measured by a timer or an outputting GPIO signal. The relationship is:dma_desc_num > polling_cycle / interrupt_interval
Determine the receiving buffer size. The receiving buffer offered by users in
i2s_channel_readshould be able to take all the data in all DMA buffers, which means that it should be larger than the total size of all the DMA buffers:recv_buffer_size > dma_desc_num * dma_buffer_size
For example, if there is an I2S application, and the known values are:
sample_rate = 144000 Hz
data_bit_width = 32 bits
slot_num = 2
polling_cycle = 10 ms
Then the parameters dma_frame_num, dma_desc_num, and recv_buf_size can be calculated as follows:
dma_frame_num * slot_num * data_bit_width / 8 = dma_buffer_size <= 4092
dma_frame_num <= 511
interrupt_interval = dma_frame_num / sample_rate = 511 / 144000 = 0.003549 s = 3.549 ms
dma_desc_num > polling_cycle / interrupt_interval = cell(10 / 3.549) = cell(2.818) = 3
recv_buffer_size > dma_desc_num * dma_buffer_size = 3 * 4092 = 12276 bytes
API Reference
Standard Mode
Header File
This header file can be included with:
#include "driver/i2s_std.h"
This header file is a part of the API provided by the
esp_driver_i2scomponent. To declare that your component depends onesp_driver_i2s, add the following to your CMakeLists.txt:REQUIRES esp_driver_i2s
or
PRIV_REQUIRES esp_driver_i2s
Functions
-
esp_err_t i2s_channel_init_std_mode(i2s_chan_handle_t handle, const i2s_std_config_t *std_cfg)
Initialize I2S channel to standard mode.
Note
Only allowed to be called when the channel state is REGISTERED, (i.e., channel has been allocated, but not initialized) and the state will be updated to READY if initialization success, otherwise the state will return to REGISTERED.
Note
When initializing the STD mode on a channel that shares the same BCLK/WS configuration and the same frame timing (sample rate and total bits per frame) as the other channel on the same port, these two channels can constitute full-duplex mode automatically. The slot layout, clock source, external clock frequency, and MCLK configuration may differ (e.g. an STD channel can pair with a TDM channel) as long as the total bits per frame are equal and the BCLK/WS frequency matches.
- Parameters:
handle -- [in] I2S channel handler
std_cfg -- [in] Configurations for standard mode, including clock, slot and GPIO The clock configuration can be generated by the helper macro
I2S_STD_CLK_DEFAULT_CONFIGThe slot configuration can be generated by the helper macroI2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG,I2S_STD_PCM_SLOT_DEFAULT_CONFIGorI2S_STD_MSB_SLOT_DEFAULT_CONFIG
- Returns:
ESP_OK Initialize successfully
ESP_ERR_NO_MEM No memory for storing the channel information
ESP_ERR_INVALID_ARG NULL pointer or invalid configuration
ESP_ERR_INVALID_STATE This channel is not registered
-
esp_err_t i2s_channel_reconfig_std_clock(i2s_chan_handle_t handle, const i2s_std_clk_config_t *clk_cfg)
Reconfigure the I2S clock for standard mode.
Note
Only allowed to be called when the channel state is READY, i.e., channel has been initialized, but not started this function won't change the state.
i2s_channel_disableshould be called before calling this function if I2S has started.Note
The input channel handle has to be initialized to standard mode, i.e.,
i2s_channel_init_std_modehas been called before reconfiguring- Parameters:
handle -- [in] I2S channel handler
clk_cfg -- [in] Standard mode clock configuration, can be generated by
I2S_STD_CLK_DEFAULT_CONFIG
- Returns:
ESP_OK Set clock successfully
ESP_ERR_INVALID_ARG NULL pointer, invalid configuration or not standard mode
ESP_ERR_INVALID_STATE This channel is not initialized or not stopped
-
esp_err_t i2s_channel_reconfig_std_slot(i2s_chan_handle_t handle, const i2s_std_slot_config_t *slot_cfg)
Reconfigure the I2S slot for standard mode.
Note
Only allowed to be called when the channel state is READY, i.e., channel has been initialized, but not started this function won't change the state.
i2s_channel_disableshould be called before calling this function if I2S has started.Note
The input channel handle has to be initialized to standard mode, i.e.,
i2s_channel_init_std_modehas been called before reconfiguring- Parameters:
handle -- [in] I2S channel handler
slot_cfg -- [in] Standard mode slot configuration, can be generated by
I2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG,I2S_STD_PCM_SLOT_DEFAULT_CONFIGandI2S_STD_MSB_SLOT_DEFAULT_CONFIG.
- Returns:
ESP_OK Set clock successfully
ESP_ERR_NO_MEM No memory for DMA buffer
ESP_ERR_INVALID_ARG NULL pointer, invalid configuration or not standard mode
ESP_ERR_INVALID_STATE This channel is not initialized or not stopped
-
esp_err_t i2s_channel_reconfig_std_gpio(i2s_chan_handle_t handle, const i2s_std_gpio_config_t *gpio_cfg)
Reconfigure the I2S GPIO for standard mode.
Note
Only allowed to be called when the channel state is READY, i.e., channel has been initialized, but not started this function won't change the state.
i2s_channel_disableshould be called before calling this function if I2S has started.Note
The input channel handle has to be initialized to standard mode, i.e.,
i2s_channel_init_std_modehas been called before reconfiguring- Parameters:
handle -- [in] I2S channel handler
gpio_cfg -- [in] Standard mode GPIO configuration, specified by user
- Returns:
ESP_OK Set clock successfully
ESP_ERR_INVALID_ARG NULL pointer, invalid configuration or not standard mode
ESP_ERR_INVALID_STATE This channel is not initialized or not stopped
Structures
-
struct i2s_std_slot_config_t
I2S slot configuration for standard mode.
Public Members
-
i2s_data_bit_width_t data_bit_width
I2S sample data bit width (valid data bits per sample)
-
i2s_slot_bit_width_t slot_bit_width
I2S slot bit width (total bits per slot)
-
i2s_slot_mode_t slot_mode
Set mono or stereo mode with I2S_SLOT_MODE_MONO or I2S_SLOT_MODE_STEREO In TX direction, mono means the written buffer contains only one slot data and stereo means the written buffer contains both left and right data
-
i2s_std_slot_mask_t slot_mask
Select the left, right or both slot
-
uint32_t ws_width
WS signal width (i.e. the number of BCLK ticks that WS signal is high)
-
bool ws_pol
WS signal polarity, set true to enable high lever first
-
bool bit_shift
Set to enable bit shift in Philips mode
-
bool msb_right
Set to place right channel data at the MSB in the FIFO
-
i2s_data_bit_width_t data_bit_width
-
struct i2s_std_clk_config_t
I2S clock configuration for standard mode.
Public Members
-
uint32_t sample_rate_hz
I2S sample rate
-
i2s_clock_src_t clk_src
Choose clock source, see
soc_periph_i2s_clk_src_tfor the supported clock sources. selectedI2S_CLK_SRC_EXTERNAL(if supports) to enable the external source clock input via MCLK pin,
-
i2s_mclk_multiple_t mclk_multiple
The multiple of MCLK to the sample rate Default is 256 in the helper macro, it can satisfy most of cases, but please set this field a multiple of
3(like 384) when using 24-bit data width, otherwise the sample rate might be inaccurate
-
uint32_t bclk_div
The division from MCLK to BCLK, only take effect for slave role, it shouldn't be smaller than 8. Increase this field when data sent by slave lag behind
-
uint32_t sample_rate_hz
-
struct i2s_std_gpio_config_t
I2S standard mode GPIO pins configuration.
Public Members
-
gpio_num_t mclk
MCK pin, output by default, input if the clock source is selected to
I2S_CLK_SRC_EXTERNAL
-
gpio_num_t bclk
BCK pin, input in slave role, output in master role
-
gpio_num_t ws
WS pin, input in slave role, output in master role
-
gpio_num_t dout
DATA pin, output
-
gpio_num_t din
DATA pin, input
-
uint32_t mclk_inv
Set 1 to invert the MCLK input/output
-
uint32_t bclk_inv
Set 1 to invert the BCLK input/output
-
uint32_t ws_inv
Set 1 to invert the WS input/output
-
struct i2s_std_gpio_config_t invert_flags
GPIO pin invert flags
-
gpio_num_t mclk
-
struct i2s_std_config_t
I2S standard mode major configuration that including clock/slot/GPIO configuration.
Public Members
-
i2s_std_clk_config_t clk_cfg
Standard mode clock configuration, can be generated by macro I2S_STD_CLK_DEFAULT_CONFIG
-
i2s_std_slot_config_t slot_cfg
Standard mode slot configuration, can be generated by macros I2S_STD_[mode]_SLOT_DEFAULT_CONFIG, [mode] can be replaced with PHILIPS/MSB/PCM
-
i2s_std_gpio_config_t gpio_cfg
Standard mode GPIO configuration, specified by user
-
i2s_std_clk_config_t clk_cfg
Macros
-
I2S_STD_PHILIPS_SLOT_DEFAULT_CONFIG(bits_per_sample, mono_or_stereo)
Philips format in 2 slots.
This file is specified for I2S standard communication mode Features:
Philips/MSB/PCM are supported in standard mode
Fixed to 2 slots
- Parameters:
bits_per_sample -- I2S data bit width
mono_or_stereo -- I2S_SLOT_MODE_MONO or I2S_SLOT_MODE_STEREO
-
I2S_STD_PCM_SLOT_DEFAULT_CONFIG(bits_per_sample, mono_or_stereo)
PCM(short) format in 2 slots.
Note
PCM(long) is same as Philips in 2 slots
- Parameters:
bits_per_sample -- I2S data bit width
mono_or_stereo -- I2S_SLOT_MODE_MONO or I2S_SLOT_MODE_STEREO
-
I2S_STD_MSB_SLOT_DEFAULT_CONFIG(bits_per_sample, mono_or_stereo)
MSB format in 2 slots.
- Parameters:
bits_per_sample -- I2S data bit width
mono_or_stereo -- I2S_SLOT_MODE_MONO or I2S_SLOT_MODE_STEREO
-
I2S_STD_CLK_DEFAULT_CONFIG(rate)
I2S default standard clock configuration.
Note
Please set the mclk_multiple to I2S_MCLK_MULTIPLE_384 while using 24 bits data width Otherwise the sample rate might be imprecise since the BCLK division is not a integer
- Parameters:
rate -- sample rate
I2S Driver
Header File
This header file can be included with:
#include "driver/i2s_common.h"
This header file is a part of the API provided by the
esp_driver_i2scomponent. To declare that your component depends onesp_driver_i2s, add the following to your CMakeLists.txt:REQUIRES esp_driver_i2s
or
PRIV_REQUIRES esp_driver_i2s
Functions
-
esp_err_t i2s_new_channel(const i2s_chan_config_t *chan_cfg, i2s_chan_handle_t *ret_tx_handle, i2s_chan_handle_t *ret_rx_handle)
Allocate new I2S channel(s)
Note
The new created I2S channel handle will be REGISTERED state after it is allocated successfully.
Note
When the port id in channel configuration is I2S_NUM_AUTO, driver will allocate I2S port automatically on one of the I2S controller, otherwise driver will try to allocate the new channel on the selected port.
Note
If both tx_handle and rx_handle are not NULL, it means this I2S controller will work at full-duplex mode, the RX and TX channels will be allocated on a same I2S port in this case. Note that some configurations of TX/RX channel are shared on ESP32 and ESP32S2, so please make sure they are working at same condition and under same status(start/stop). Currently, full-duplex mode can't guarantee TX/RX channels write/read synchronously, they can only share the clock signals for now.
Note
If tx_handle OR rx_handle is NULL, it means this I2S controller will work at simplex mode. For ESP32 and ESP32S2, the whole I2S controller (i.e. both RX and TX channel) will be occupied, even if only one of RX or TX channel is registered. For the other targets, another channel on this controller will still available.
Note
tx_destination/rx_destinationselect the DMA memory path or Bluetooth data path when supported. Requesting an unsupported destination or port returns an error.- Parameters:
chan_cfg -- [in] I2S controller channel configurations
ret_tx_handle -- [out] I2S channel handler used for managing the sending channel(optional)
ret_rx_handle -- [out] I2S channel handler used for managing the receiving channel(optional)
- Returns:
ESP_OK Allocate new channel(s) success
ESP_ERR_NOT_SUPPORTED The communication mode or data path is not supported on the current chip, or Bluetooth data path is requested on an unsupported port
ESP_ERR_INVALID_ARG NULL pointer or illegal parameter in i2s_chan_config_t
ESP_ERR_NOT_FOUND No available I2S channel found
-
esp_err_t i2s_del_channel(i2s_chan_handle_t handle)
Delete the I2S channel.
Note
Only allowed to be called when the I2S channel is at REGISTERED or READY state (i.e., it should stop before deleting it).
Note
Resource will be free automatically if all channels in one port are deleted
- Parameters:
handle -- [in] I2S channel handler
ESP_OK Delete successfully
ESP_ERR_INVALID_ARG NULL pointer
-
esp_err_t i2s_channel_get_info(i2s_chan_handle_t handle, i2s_chan_info_t *chan_info)
Get I2S channel information.
- Parameters:
handle -- [in] I2S channel handler
chan_info -- [out] I2S channel basic information
- Returns:
ESP_OK Get I2S channel information success
ESP_ERR_NOT_FOUND The input handle doesn't match any registered I2S channels, it may not an I2S channel handle or not available any more
ESP_ERR_INVALID_ARG The input handle or chan_info pointer is NULL
-
esp_err_t i2s_channel_enable(i2s_chan_handle_t handle)
Enable the I2S channel.
Note
Only allowed to be called when the channel state is READY, (i.e., channel has been initialized, but not started) the channel will enter RUNNING state once it is enabled successfully.
Note
Enable the channel can start the I2S communication on hardware. It will start outputting BCLK and WS signal. For MCLK signal, it will start to output when initialization is finished
- Parameters:
handle -- [in] I2S channel handler
ESP_OK Start successfully
ESP_ERR_INVALID_ARG NULL pointer
ESP_ERR_INVALID_STATE This channel has not initialized or already started
-
esp_err_t i2s_channel_disable(i2s_chan_handle_t handle)
Disable the I2S channel.
Note
Only allowed to be called when the channel state is RUNNING, (i.e., channel has been started) the channel will enter READY state once it is disabled successfully.
Note
Disable the channel can stop the I2S communication on hardware. It will stop BCLK and WS signal but not MCLK signal
- Parameters:
handle -- [in] I2S channel handler
- Returns:
ESP_OK Stop successfully
ESP_ERR_INVALID_ARG NULL pointer
ESP_ERR_INVALID_STATE This channel has not stated
-
esp_err_t i2s_channel_write(i2s_chan_handle_t handle, const void *src, size_t size, size_t *bytes_written, uint32_t timeout_ms)
I2S write data.
Note
Only allowed to be called when the channel state is RUNNING, (i.e., TX channel has been started and is not writing now) but the RUNNING only stands for the software state, it doesn't mean there is no the signal transporting on line.
- Parameters:
handle -- [in] I2S channel handler
src -- [in] The pointer of sent data buffer
size -- [in] Max data buffer length
bytes_written -- [out] Byte number that actually be sent, can be NULL if not needed
timeout_ms -- [in] Max block time
- Returns:
ESP_OK Write successfully
ESP_ERR_INVALID_ARG NULL pointer or this handle is not TX handle
ESP_ERR_TIMEOUT Writing timeout, no writing event received from ISR within ticks_to_wait
ESP_ERR_INVALID_STATE I2S is not ready to write
-
esp_err_t i2s_channel_read(i2s_chan_handle_t handle, void *dest, size_t size, size_t *bytes_read, uint32_t timeout_ms)
I2S read data.
Note
Only allowed to be called when the channel state is RUNNING but the RUNNING only stands for the software state, it doesn't mean there is no the signal transporting on line.
- Parameters:
handle -- [in] I2S channel handler
dest -- [in] The pointer of receiving data buffer
size -- [in] Max data buffer length
bytes_read -- [out] Byte number that actually be read, can be NULL if not needed
timeout_ms -- [in] Max block time
- Returns:
ESP_OK Read successfully
ESP_ERR_INVALID_ARG NULL pointer or this handle is not RX handle
ESP_ERR_TIMEOUT Reading timeout, no reading event received from ISR within ticks_to_wait
ESP_ERR_INVALID_STATE I2S is not ready to read
-
esp_err_t i2s_channel_register_event_callback(i2s_chan_handle_t handle, const i2s_event_callbacks_t *callbacks, void *user_data)
Set event callbacks for I2S channel.
Note
DMA event callbacks can only be registered or deregistered before the channel is enabled.
Note
The TX FIFO sync callback can be registered, updated, or deregistered while the channel is running.
Note
Registering the TX FIFO sync callback only updates the handler; the TX sync interrupt is controlled by i2s_channel_enable_tx_fifo_sync().
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the
callbacksstructure to NULL.Note
When CONFIG_I2S_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well. The
user_datashould also reside in SRAM or internal RAM as well.- Parameters:
handle -- [in] I2S channel handler
callbacks -- [in] Group of callback functions
user_data -- [in] User data, which will be passed to callback functions directly
- Returns:
ESP_OK Set event callbacks successfully
ESP_ERR_INVALID_ARG Set event callbacks failed because of invalid argument
ESP_ERR_INVALID_STATE Set event callbacks failed because DMA event callbacks are changed while the channel is running
ESP_ERR_NOT_SUPPORTED Set event callbacks failed because the requested event is not supported by this channel
-
esp_err_t i2s_channel_preload_data(i2s_chan_handle_t tx_handle, const void *src, size_t size, size_t *bytes_loaded)
Preload the data into TX DMA buffer.
Note
Only allowed to be called when the channel state is READY, (i.e., channel has been initialized, but not started)
Note
As the initial DMA buffer has no data inside, it will transmit the empty buffer after enabled the channel, this function is used to preload the data into the DMA buffer, so that the valid data can be transmitted immediately after the channel is enabled.
Note
This function can be called multiple times before enabling the channel, the buffer that loaded later will be concatenated behind the former loaded buffer. But when all the DMA buffers have been loaded, no more data can be preload then, please check the
bytes_loadedparameter to see how many bytes are loaded successfully, when thebytes_loadedis smaller than thesize, it means the DMA buffers are full.- Parameters:
tx_handle -- [in] I2S TX channel handler
src -- [in] The pointer of the source buffer to be loaded
size -- [in] The source buffer size
bytes_loaded -- [out] The bytes that successfully been loaded into the TX DMA buffer
- Returns:
ESP_OK Load data successful
ESP_FAIL Failed to push the message queue
ESP_ERR_INVALID_ARG NULL pointer or not TX direction
ESP_ERR_INVALID_STATE This channel has not stated
-
esp_err_t i2s_channel_tune_rate(i2s_chan_handle_t handle, const i2s_tuning_config_t *tune_cfg, i2s_tuning_info_t *tune_info)
Tune the I2S clock rate.
Note
Only allowed to be called when the channel state is READY, (i.e., channel has been initialized, but not started)
Note
This function is mainly to fine-tuning the mclk to match the speed of producer and consumer. So that to avoid exsaust of the memory to store the data from producer. Please take care the how different the frequency error can be tolerant by your codec, otherwise the codec might stop working if the frequency changes a lot.
- Parameters:
handle -- [in] I2S channel handler
tune_cfg -- [in] The clock tuning configuration, can be NULL if only need the current clock result
tune_info -- [out] The clock tuning information, can be NULL if not needed
- Returns:
ESP_OK Tune the clock successfully
ESP_ERR_INVALID_ARG Tune the clock failed because of the invalid argument like NULL pointer or out of range
ESP_ERR_NOT_SUPPORTED Tune the clock failed because this function does not support to tune the external clock source
Structures
-
struct i2s_event_callbacks_t
Group of I2S callbacks.
Note
The callbacks are all running under ISR environment
Note
When CONFIG_I2S_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well.
Public Members
-
i2s_isr_callback_t on_recv
Callback of data received event, only for RX channel The event data includes DMA buffer address and size that just finished receiving data
-
i2s_isr_callback_t on_recv_q_ovf
Callback of receiving queue overflowed event, only for RX channel The event data includes buffer size that has been overwritten
-
i2s_isr_callback_t on_sent
Callback of data sent event, only for TX channel The event data includes DMA buffer address and size that just finished sending data
-
i2s_isr_callback_t on_send_q_ovf
Callback of sending queue overflowed event, only for TX channel The event data includes buffer size that has been overwritten
-
i2s_isr_callback_t on_recv
-
struct i2s_chan_config_t
I2S controller channel configuration.
Public Members
-
int id
I2S port id
-
i2s_role_t role
I2S role, I2S_ROLE_MASTER or I2S_ROLE_SLAVE
-
uint32_t dma_desc_num
I2S DMA buffer number, it is also the number of DMA descriptor
-
uint32_t dma_frame_num
I2S frame number in one DMA buffer. One frame means one-time sample data in all slots, it should be the multiple of
3when the data bit width is 24.
-
bool auto_clear
Alias of
auto_clear_after_cb
-
bool auto_clear_after_cb
Set to auto clear DMA TX buffer after
on_sentcallback, I2S will always send zero automatically if no data to send. So that user can assign the data to the DMA buffers directly in the callback, and the data won't be cleared after quit the callback.
-
bool auto_clear_before_cb
Set to auto clear DMA TX buffer before
on_sentcallback, I2S will always send zero automatically if no data to send So that user can access data in the callback that just finished to send.
-
bool allow_pd
Set to allow power down. When this flag set, the driver will backup/restore the I2S registers before/after entering/exist sleep mode. By this approach, the system can power off I2S's power domain. This can save power, but at the expense of more RAM being consumed.
-
int intr_priority
I2S interrupt priority, range [0, 7], if set to 0, the driver will try to allocate an interrupt with a relative low priority (1,2,3)
-
i2s_destination_t tx_destination
TX data path: DMA (memory) or Bluetooth (see
i2s_destination_t). I2S0 only when set toI2S_DESTINATION_BT. Immutable afteri2s_new_channel.
-
i2s_destination_t rx_destination
RX data path: DMA (memory) or Bluetooth. Same constraints as
tx_destination.
-
int id
-
struct i2s_chan_info_t
I2S channel information.
Public Members
-
int id
I2S port id
-
i2s_role_t role
I2S role, I2S_ROLE_MASTER or I2S_ROLE_SLAVE
-
i2s_comm_mode_t mode
I2S channel communication mode
-
bool is_enabled
I2S channel is enabled or not
-
i2s_chan_handle_t pair_chan
I2S pair channel handle in duplex mode, always NULL in simplex mode
-
uint32_t total_dma_buf_size
Total size of all the allocated DMA buffers
0 if the channel has not been initialized
non-zero if the channel has been initialized
-
i2s_clock_src_t clk_src
Clock source of I2S
-
uint32_t sclk_hz
Source clock frequency
-
uint32_t mclk_hz
MCLK frequency
-
uint32_t bclk_hz
BCLK frequency
-
const void *mode_cfg
Mode configuration, it need to be casted to the corresponding type according to the communication mode
I2S_COMM_MODE_STD: i2s_std_config_t*
I2S_COMM_MODE_TDM: i2s_tdm_config_t*
I2S_COMM_MODE_PDM + I2S_DIR_RX: i2s_pdm_rx_config_t*
I2S_COMM_MODE_PDM + I2S_DIR_TX: i2s_pdm_tx_config_t*
-
int id
Macros
-
I2S_CHANNEL_DEFAULT_CONFIG(i2s_num, i2s_role)
get default I2S property
-
I2S_GPIO_UNUSED
Used in i2s_gpio_config_t for signals which are not used
I2S Types
Header File
This header file can be included with:
#include "driver/i2s_types.h"
This header file is a part of the API provided by the
esp_driver_i2scomponent. To declare that your component depends onesp_driver_i2s, add the following to your CMakeLists.txt:REQUIRES esp_driver_i2s
or
PRIV_REQUIRES esp_driver_i2s
Structures
-
struct lp_i2s_trans_t
LP I2S transaction type.
-
struct i2s_event_data_t
Event structure used in I2S event queue.
Public Members
-
void *dma_buf
The first level pointer of DMA buffer that just finished sending or receiving for
on_recvandon_sentcallback NULL foron_recv_q_ovfandon_send_q_ovfcallback
-
size_t size
The buffer size of DMA buffer when success to send or receive, also the buffer size that dropped when queue overflow. It is related to the dma_frame_num and data_bit_width, typically it is fixed when data_bit_width is not changed.
-
void *dma_buf
-
struct i2s_tuning_config_t
I2S clock tuning configurations.
Public Members
-
i2s_tuning_mode_t tune_mode
Tuning mode, which decides how to tune the MCLK with the tuning value
-
int32_t tune_mclk_val
Tuning value
-
int32_t max_delta_mclk
The maximum frequency that can be increased comparing to the initial MCLK freuqnecy
-
int32_t min_delta_mclk
The minimum frequency that can be decreased comparing to the initial MCLK freuqnecy
-
i2s_tuning_mode_t tune_mode
-
struct i2s_tuning_info_t
I2S clock tuning result.
-
struct lp_i2s_evt_data_t
Event data structure for LP I2S.
Public Members
-
lp_i2s_trans_t trans
LP I2S transaction.
-
lp_i2s_trans_t trans
Macros
-
I2S_NUM_0
I2S controller port 0
-
I2S_NUM_1
I2S controller port 1
-
I2S_NUM_2
I2S controller port 2
-
I2S_NUM_AUTO
Select an available port automatically
Type Definitions
-
typedef struct i2s_channel_obj_t *i2s_chan_handle_t
I2S channel object handle, the control unit of the I2S driver
-
typedef struct lp_i2s_channel_obj_t *lp_i2s_chan_handle_t
I2S channel object handle, the control unit of the I2S driver
-
typedef bool (*i2s_isr_callback_t)(i2s_chan_handle_t handle, i2s_event_data_t *event, void *user_ctx)
I2S event callback.
- Param handle:
[in] I2S channel handle, created from
i2s_new_channel()- Param event:
[in] I2S event data
- Param user_ctx:
[in] User registered context, passed from
i2s_channel_register_event_callback()- Return:
Whether a high priority task has been waken up by this callback function
-
typedef bool (*lp_i2s_callback_t)(lp_i2s_chan_handle_t handle, lp_i2s_evt_data_t *event, void *user_ctx)
LP I2S event callback type.
- Param handle:
[in] LP I2S channel handle
- Param event:
[in] Event data
- Param user_ctx:
[in] User data
- Return:
Whether a high priority task has been waken up by this callback function
Enumerations
-
enum i2s_comm_mode_t
I2S controller communication mode.
Values:
-
enumerator I2S_COMM_MODE_STD
I2S controller using standard communication mode, support Philips/MSB/PCM format
-
enumerator I2S_COMM_MODE_NONE
Unspecified I2S controller mode
-
enumerator I2S_COMM_MODE_STD
-
enum i2s_mclk_multiple_t
The multiple of MCLK to sample rate.
Note
MCLK is the minimum resolution of the I2S clock. Increasing mclk multiple can reduce the clock jitter of BCLK and WS, which is also useful for the codec that don't require MCLK but have strict requirement to BCLK. For the 24-bit slot width, please choose a multiple that can be divided by 3 (i.e. 24-bit compatible).
Values:
-
enumerator I2S_MCLK_MULTIPLE_128
MCLK = sample_rate * 128
-
enumerator I2S_MCLK_MULTIPLE_192
MCLK = sample_rate * 192 (24-bit compatible)
-
enumerator I2S_MCLK_MULTIPLE_256
MCLK = sample_rate * 256
-
enumerator I2S_MCLK_MULTIPLE_384
MCLK = sample_rate * 384 (24-bit compatible)
-
enumerator I2S_MCLK_MULTIPLE_512
MCLK = sample_rate * 512
-
enumerator I2S_MCLK_MULTIPLE_576
MCLK = sample_rate * 576 (24-bit compatible)
-
enumerator I2S_MCLK_MULTIPLE_768
MCLK = sample_rate * 768 (24-bit compatible)
-
enumerator I2S_MCLK_MULTIPLE_1024
MCLK = sample_rate * 1024
-
enumerator I2S_MCLK_MULTIPLE_1152
MCLK = sample_rate * 1152 (24-bit compatible)
-
enumerator I2S_MCLK_MULTIPLE_128
-
enum i2s_tuning_mode_t
I2S clock tuning operation.
Values:
-
enumerator I2S_TUNING_MODE_ADDSUB
Add or subtract the tuning value based on the current clock
-
enumerator I2S_TUNING_MODE_SET
Set the tuning value to overwrite the current clock
-
enumerator I2S_TUNING_MODE_RESET
Set the clock to the initial value
-
enumerator I2S_TUNING_MODE_ADDSUB
Header File
This header file can be included with:
#include "hal/i2s_types.h"
This header file is a part of the API provided by the
esp_hal_i2scomponent. To declare that your component depends onesp_hal_i2s, add the following to your CMakeLists.txt:REQUIRES esp_hal_i2s
or
PRIV_REQUIRES esp_hal_i2s
Type Definitions
-
typedef int i2s_clock_src_t
Define a default type to avoid compiling warnings
Enumerations
-
enum i2s_slot_mode_t
I2S channel slot mode.
Values:
-
enumerator I2S_SLOT_MODE_MONO
I2S channel slot format mono, transmit same data in all slots for tx mode, only receive the data in the first slots for rx mode.
-
enumerator I2S_SLOT_MODE_STEREO
I2S channel slot format stereo, transmit different data in different slots for tx mode, receive the data in all slots for rx mode.
-
enumerator I2S_SLOT_MODE_MONO
-
enum i2s_dir_t
I2S channel direction.
Values:
-
enumerator I2S_DIR_RX
I2S channel direction RX
-
enumerator I2S_DIR_TX
I2S channel direction TX
-
enumerator I2S_DIR_RX
-
enum i2s_role_t
I2S controller role.
Values:
-
enumerator I2S_ROLE_MASTER
I2S controller master role, bclk and ws signal will be set to output
-
enumerator I2S_ROLE_SLAVE
I2S controller slave role, bclk and ws signal will be set to input
-
enumerator I2S_ROLE_MASTER
-
enum i2s_data_bit_width_t
Available data bit width in one slot.
Values:
-
enumerator I2S_DATA_BIT_WIDTH_8BIT
I2S channel data bit-width: 8
-
enumerator I2S_DATA_BIT_WIDTH_16BIT
I2S channel data bit-width: 16
-
enumerator I2S_DATA_BIT_WIDTH_24BIT
I2S channel data bit-width: 24
-
enumerator I2S_DATA_BIT_WIDTH_32BIT
I2S channel data bit-width: 32
-
enumerator I2S_DATA_BIT_WIDTH_8BIT
-
enum i2s_slot_bit_width_t
Total slot bit width in one slot.
Values:
-
enumerator I2S_SLOT_BIT_WIDTH_AUTO
I2S channel slot bit-width equals to data bit-width
-
enumerator I2S_SLOT_BIT_WIDTH_8BIT
I2S channel slot bit-width: 8
-
enumerator I2S_SLOT_BIT_WIDTH_16BIT
I2S channel slot bit-width: 16
-
enumerator I2S_SLOT_BIT_WIDTH_24BIT
I2S channel slot bit-width: 24
-
enumerator I2S_SLOT_BIT_WIDTH_32BIT
I2S channel slot bit-width: 32
-
enumerator I2S_SLOT_BIT_WIDTH_AUTO
-
enum i2s_destination_t
I2S data path destination.
Values:
-
enumerator I2S_DESTINATION_DMA
Route I2S sample data through DMA to/from memory (default). On chips without GDMA, this is the legacy I2S DMA path.
-
enumerator I2S_DESTINATION_BT
Route I2S data to Bluetooth (I2S0 only; see
SOC_I2S_SUPPORTS_BT_DEST)
-
enumerator I2S_DESTINATION_DMA
-
enum i2s_pdm_data_fmt_t
I2S PDM data format.
Values:
-
enumerator I2S_PDM_DATA_FMT_PCM
PDM RX: Enable the hardware PDM to PCM filter to convert the inputted PDM data on the line into PCM format in software, so that the read data in software is PCM format data already, no need additional software filter. PCM data format is only available when PDM2PCM filter is supported in hardware. PDM TX: Enable the hardware PCM to PDM filter to convert the written PCM data in software into PDM format on the line, so that we only need to write the PCM data in software, no need to prepare raw PDM data in software. PCM data format is only available when PCM2PDM filter is supported in hardware.
-
enumerator I2S_PDM_DATA_FMT_RAW
PDM RX: Read the raw PDM data directly in software, without the hardware PDM to PCM filter. You may need a software PDM to PCM filter to convert the raw PDM data that read into PCM format. PDM TX: Write the raw PDM data directly in software, without the hardware PCM to PDM filter. You may need to prepare the raw PDM data in software to output the PDM format data on the line.
-
enumerator I2S_PDM_DATA_FMT_PCM
-
enum i2s_std_slot_mask_t
I2S slot select in standard mode.
Note
It has different meanings in tx/rx/mono/stereo mode, and it may have different behaviors on different targets For the details, please refer to the I2S API reference
Values:
-
enumerator I2S_STD_SLOT_LEFT
I2S transmits or receives left slot
-
enumerator I2S_STD_SLOT_RIGHT
I2S transmits or receives right slot
-
enumerator I2S_STD_SLOT_BOTH
I2S transmits or receives both left and right slot
-
enumerator I2S_STD_SLOT_LEFT
-
enum i2s_pdm_slot_mask_t
I2S slot select in PDM mode.
Values:
-
enumerator I2S_PDM_SLOT_RIGHT
I2S PDM only transmits or receives the PDM device whose 'select' pin is pulled up
-
enumerator I2S_PDM_SLOT_LEFT
I2S PDM only transmits or receives the PDM device whose 'select' pin is pulled down
-
enumerator I2S_PDM_SLOT_BOTH
I2S PDM transmits or receives both two slots
-
enumerator I2S_PDM_SLOT_RIGHT
-
enum i2s_etm_event_type_t
I2S channel events that supported by the ETM module.
Values:
-
enumerator I2S_ETM_EVENT_DONE
Trigger condition: TX: no data to send in the TX FIFO, i.e., DMA need to stop (next desc is NULL) RX: 1. If rx_stop_mode = 0, this event will trigger when DMA is stopped (next desc is NULL)
If rx_stop_mode = 1, this event will trigger when DMA in_suc_eof.
If rx_stop_mode = 2, this event will trigger when RX FIFO is full. Event that I2S TX or RX stopped
-
enumerator I2S_ETM_EVENT_REACH_THRESH
Trigger condition: TX: the sent words(in 32-bit) number reach the threshold that configured in
etm_tx_send_word_numRX: the received words(in 32-bit) number reach the threshold that configured inetm_rx_receive_word_numandetm_rx_receive_word_numshould be smaller than the size of the DMA buffer in onein_suc_eofevent. Event that the I2S sent or received data reached the threshold
-
enumerator I2S_ETM_EVENT_MAX
Maximum number of events
-
enumerator I2S_ETM_EVENT_DONE